S-ar putea să vă placă și
- Pillsbury Cookie ChallengeDocument15 paginiPillsbury Cookie Challengechawlavishnu100% (2)
- Application Research of Maximum Wind-Energy Tracing Controller Based Adaptive Control Strategy in WECSDocument5 paginiApplication Research of Maximum Wind-Energy Tracing Controller Based Adaptive Control Strategy in WECSEngr Tahir Iqbal AwanÎncă nu există evaluări
- A Novel Control Strategy of Power Converter Used To Direct Driven Permanent Magnet Wind Power Generation SystemDocument4 paginiA Novel Control Strategy of Power Converter Used To Direct Driven Permanent Magnet Wind Power Generation Systemjamal64722111Încă nu există evaluări
- Intelligent Control A Class Wind Energy Conversion Systems: Chedid, F. Mrad, M. BasmaDocument8 paginiIntelligent Control A Class Wind Energy Conversion Systems: Chedid, F. Mrad, M. Basmamusaad1Încă nu există evaluări
- 12.an Enhanced MPPT Technique For Small-Scale Wind Energy Conversion SystemsDocument7 pagini12.an Enhanced MPPT Technique For Small-Scale Wind Energy Conversion SystemsRamesh KomarasamiÎncă nu există evaluări
- Paper1 PDFDocument5 paginiPaper1 PDFRedfort DuraiÎncă nu există evaluări
- Design and Analysis of PMSG Based Wind Power Generation: Ee Department, SRMGPC, Lucknow 1Document10 paginiDesign and Analysis of PMSG Based Wind Power Generation: Ee Department, SRMGPC, Lucknow 1AMANÎncă nu există evaluări
- On-Off Control of Wind Turbine For Maximum Wind Power Point TrackingDocument6 paginiOn-Off Control of Wind Turbine For Maximum Wind Power Point TrackingRodrigo MesquitaÎncă nu există evaluări
- Watts 3 w AU p ρC 2 1 m PDocument7 paginiWatts 3 w AU p ρC 2 1 m PAbhishek SinghÎncă nu există evaluări
- Wind Speed and Rotor Position Sensorless Control For Direct-Drive PMG Wind TurbinesDocument9 paginiWind Speed and Rotor Position Sensorless Control For Direct-Drive PMG Wind TurbinesRaj KumarÎncă nu există evaluări
- A Direct Torque Control Method For CSC Based PMSG Wind Energy Conversion SystemsDocument7 paginiA Direct Torque Control Method For CSC Based PMSG Wind Energy Conversion SystemsLê Xuân ThăngÎncă nu există evaluări
- Modeling and Control of Direct Drive Variable Speed Stand-Alone Wind Energy Conversion SystemsDocument6 paginiModeling and Control of Direct Drive Variable Speed Stand-Alone Wind Energy Conversion SystemsSamundra GurungÎncă nu există evaluări
- New Control Strategies of A Small Size Wind Generation System For Battery ChargingDocument6 paginiNew Control Strategies of A Small Size Wind Generation System For Battery ChargingZellagui EnergyÎncă nu există evaluări
- Ieee2008 2Document14 paginiIeee2008 2pnlinh28Încă nu există evaluări
- DSP-Based Experimental Rig With The Doubly-Fed Induction Generator ForDocument12 paginiDSP-Based Experimental Rig With The Doubly-Fed Induction Generator Fordebasis250Încă nu există evaluări
- Morimoto 2005Document8 paginiMorimoto 2005gerson gomesÎncă nu există evaluări
- Modeling of Wind Energy System With MPPTDocument6 paginiModeling of Wind Energy System With MPPTsbv1986Încă nu există evaluări
- Cage RotorDocument6 paginiCage Rotordebasis250Încă nu există evaluări
- Incremental Conductance Technique For A Hybrid Wind - Solar Energy SystemDocument4 paginiIncremental Conductance Technique For A Hybrid Wind - Solar Energy SystemHanumante AkshayÎncă nu există evaluări
- A Fuzzy-Logic Based MPPT Method For Stand-Alone Wind Turbine SystemDocument8 paginiA Fuzzy-Logic Based MPPT Method For Stand-Alone Wind Turbine SystemAJER JOURNALÎncă nu există evaluări
- 02-An Intelligent Maximum Power Extraction Algorithm For Inverter-Based Variable Speed Wind Turbine SystemsDocument8 pagini02-An Intelligent Maximum Power Extraction Algorithm For Inverter-Based Variable Speed Wind Turbine Systemsömer Haşim YörükÎncă nu există evaluări
- Doubly Fed Induction Generator Using Back To Back PWM Converters and Its Application To Variable-Speed Wind-Energy GenerationDocument11 paginiDoubly Fed Induction Generator Using Back To Back PWM Converters and Its Application To Variable-Speed Wind-Energy GenerationVally ZazaÎncă nu există evaluări
- A New Maximum Power Point Tracking Technique For Permanent Magnet Synchronous Generator Based Wind Energy Conversion SystemDocument12 paginiA New Maximum Power Point Tracking Technique For Permanent Magnet Synchronous Generator Based Wind Energy Conversion SystemArun KumarÎncă nu există evaluări
- Doubly-Fed Wind Turbine Mathematical Model and Simulation: 2014 International Symposium On Computer, Consumer and ControlDocument3 paginiDoubly-Fed Wind Turbine Mathematical Model and Simulation: 2014 International Symposium On Computer, Consumer and ControlSandeepKumarÎncă nu există evaluări
- MPPT of Multi-Signal Feedforward Doubly-Fed Asynchronous Wind TurbineDocument6 paginiMPPT of Multi-Signal Feedforward Doubly-Fed Asynchronous Wind Turbineyasmin ElsayedÎncă nu există evaluări
- Ordered Synopsis CenthilDocument14 paginiOrdered Synopsis CenthilageesÎncă nu există evaluări
- DRL For Optimal Perturbation For MPPT in Wind EnergyDocument7 paginiDRL For Optimal Perturbation For MPPT in Wind EnergyMaidul Islam RasuÎncă nu există evaluări
- Optimal PDFDocument6 paginiOptimal PDFjalilemadiÎncă nu există evaluări
- Presented by Animesh Karmaker Roll: 1103115 Eee, KuetDocument14 paginiPresented by Animesh Karmaker Roll: 1103115 Eee, KuetNilÎncă nu există evaluări
- Ref For ANFISDocument21 paginiRef For ANFISTheodore Teddy JÎncă nu există evaluări
- MPPT - Wind Power 11020623122124957Document8 paginiMPPT - Wind Power 11020623122124957tran duyÎncă nu există evaluări
- PMSG ModelingDocument6 paginiPMSG Modelingوليد ابو شاكرÎncă nu există evaluări
- Power Maximization Control of Small Wind System Using Permanent Magnet Synchronous GeneratorDocument13 paginiPower Maximization Control of Small Wind System Using Permanent Magnet Synchronous GeneratorhassenbbÎncă nu există evaluări
- On-Line Adaptive Artificial Neural Network Based Vector Control Permanent MagnetDocument8 paginiOn-Line Adaptive Artificial Neural Network Based Vector Control Permanent MagnetKushagra KhamesraÎncă nu există evaluări
- Shen 2014 ModelingDocument7 paginiShen 2014 ModelingPaponson Indrachai-eaÎncă nu există evaluări
- Study and Control of A Variable-Speed Wind-Energy System Connected To The GridDocument9 paginiStudy and Control of A Variable-Speed Wind-Energy System Connected To The GridhassenbbÎncă nu există evaluări
- An Improved Maximum Power Point Tracking Controller For PV Systems Using Artificial Neural NetworkDocument6 paginiAn Improved Maximum Power Point Tracking Controller For PV Systems Using Artificial Neural NetworkOns Zarrad Ep JemaaÎncă nu există evaluări
- Continuous Variable Speed Wind Turbine: Transmission Concept and Robust ControlDocument17 paginiContinuous Variable Speed Wind Turbine: Transmission Concept and Robust ControlDork654651Încă nu există evaluări
- Sliding Mode EnergiesDocument17 paginiSliding Mode EnergiesDileep VarmaÎncă nu există evaluări
- Ecotecnia 48 750 Variable-Speed Wind TurbineDocument4 paginiEcotecnia 48 750 Variable-Speed Wind TurbineMarcWorldÎncă nu există evaluări
- Design of A Wind Turbine Pitch Controller For Loads and Fatigue ReductionDocument10 paginiDesign of A Wind Turbine Pitch Controller For Loads and Fatigue ReductionperkusicmÎncă nu există evaluări
- Maximum Power Point Tracking of Wecs Using Fuzzy Logic ControllerDocument5 paginiMaximum Power Point Tracking of Wecs Using Fuzzy Logic ControllerInternational Journal of Application or Innovation in Engineering & ManagementÎncă nu există evaluări
- An Improved Efficiency of Fuzzy Sliding Mode Cont PDFDocument5 paginiAn Improved Efficiency of Fuzzy Sliding Mode Cont PDFNoureddine BounaslaÎncă nu există evaluări
- A Master-Slave Fuzzy Logic Control SchemeDocument6 paginiA Master-Slave Fuzzy Logic Control SchemeFatih BurakÎncă nu există evaluări
- 5 Modeling and Control of Variable Speed Wind Turbine Drive System DynamicsDocument11 pagini5 Modeling and Control of Variable Speed Wind Turbine Drive System DynamicsnguyenngocbanÎncă nu există evaluări
- Designing An Adaptive Fuzzy Controller For Maximum Wind Energy ExtractionDocument11 paginiDesigning An Adaptive Fuzzy Controller For Maximum Wind Energy ExtractionYume YumeÎncă nu există evaluări
- Kumar 2016Document6 paginiKumar 2016DrYs Kishore BabuÎncă nu există evaluări
- Maximum Power Extraction From Utility-Interfaced Wind TurbinesDocument34 paginiMaximum Power Extraction From Utility-Interfaced Wind Turbinesrihatrivedi_069Încă nu există evaluări
- Introdução VariaçãoDocument6 paginiIntrodução VariaçãoTravis GrayÎncă nu există evaluări
- Processes 07 00158 PDFDocument18 paginiProcesses 07 00158 PDFDileep VarmaÎncă nu există evaluări
- Research Article: Modelling of A PMSG Wind Turbine With Autonomous ControlDocument10 paginiResearch Article: Modelling of A PMSG Wind Turbine With Autonomous ControlHoa NguyenÎncă nu există evaluări
- Control Strategy For HVDC Interconnected DC-based Offshore Wind FarmDocument6 paginiControl Strategy For HVDC Interconnected DC-based Offshore Wind FarmTruong HoaÎncă nu există evaluări
- Control of Permanent-Magnet Generators Applied To Variable-Speed Wind-Energy Systems Connected To The GridDocument6 paginiControl of Permanent-Magnet Generators Applied To Variable-Speed Wind-Energy Systems Connected To The GridJayamohan MÎncă nu există evaluări
- Self Tuning Control of Wind Turbine Using Neural Network IdentifierDocument13 paginiSelf Tuning Control of Wind Turbine Using Neural Network IdentifierAlla SapronovaÎncă nu există evaluări
- Design and Modeling of Wind Energy Conversion System Based On PMSG Using MPPT TechniqueDocument5 paginiDesign and Modeling of Wind Energy Conversion System Based On PMSG Using MPPT TechniqueijsretÎncă nu există evaluări
- Simulation and Control - FullDocument10 paginiSimulation and Control - FullTJPRC PublicationsÎncă nu există evaluări
- Get PDaDocument9 paginiGet PDaishuadroitÎncă nu există evaluări
- Simulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorDe la EverandSimulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorÎncă nu există evaluări
- Control of DC Motor Using Different Control StrategiesDe la EverandControl of DC Motor Using Different Control StrategiesÎncă nu există evaluări
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetDe la EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetÎncă nu există evaluări
- 145th - Annual - Securities - Report - 2014 PDFDocument204 pagini145th - Annual - Securities - Report - 2014 PDFchawlavishnuÎncă nu există evaluări
- Vendor Landscape: IT Asset Management (ITAM)Document16 paginiVendor Landscape: IT Asset Management (ITAM)chawlavishnuÎncă nu există evaluări
- Using The GARCH Model To Analyse and Predict The Different Stock MarketsDocument8 paginiUsing The GARCH Model To Analyse and Predict The Different Stock MarketschawlavishnuÎncă nu există evaluări
- Investors Type and ExpectationsDocument3 paginiInvestors Type and ExpectationschawlavishnuÎncă nu există evaluări
- PE RatioDocument3 paginiPE RatiochawlavishnuÎncă nu există evaluări
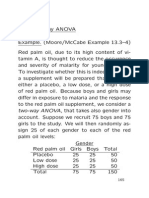
- MBA 504 Ch11 SolutionsDocument31 paginiMBA 504 Ch11 Solutionschawlavishnu100% (1)
- Nonlife RatiosDocument73 paginiNonlife RatioschawlavishnuÎncă nu există evaluări
- CVPDocument11 paginiCVPchawlavishnuÎncă nu există evaluări
- 2 Way AnovaDocument20 pagini2 Way Anovachawlavishnu100% (1)
- Shouldice Hospital: Anna Swanson Phillip Dean Ben GierokDocument25 paginiShouldice Hospital: Anna Swanson Phillip Dean Ben GierokchawlavishnuÎncă nu există evaluări
- Dove's Real Woman Campaign in 2004 Increased Its SalesDocument4 paginiDove's Real Woman Campaign in 2004 Increased Its SaleschawlavishnuÎncă nu există evaluări
- Net NeutralityDocument46 paginiNet NeutralitychawlavishnuÎncă nu există evaluări
- (Rishabh Mittal) : Biodata N Pics SharedDocument4 pagini(Rishabh Mittal) : Biodata N Pics SharedchawlavishnuÎncă nu există evaluări
- Wind Energy Term PaperDocument5 paginiWind Energy Term Paperea6qsxqd100% (1)
- Charger WIND POWER PDFDocument17 paginiCharger WIND POWER PDFHassan TalhaÎncă nu există evaluări
- A) Wind Power: Low Solidity, Low Torque - Darries Long Drive Shaft - SavoneiousDocument4 paginiA) Wind Power: Low Solidity, Low Torque - Darries Long Drive Shaft - Savoneiousaravind babuÎncă nu există evaluări
- Automatically Regulated C.V.T. in Wind PDFDocument12 paginiAutomatically Regulated C.V.T. in Wind PDFمهيمن فالح حمدÎncă nu există evaluări
- Otherpower Diy Wind Generators 2004Document1.064 paginiOtherpower Diy Wind Generators 2004Al-Usmanu Usman100% (1)
- Comparsion and Analysis of Economy of WTIVDocument5 paginiComparsion and Analysis of Economy of WTIVJurcyś StalloneÎncă nu există evaluări
- 5.berihu GebreyohannesDocument103 pagini5.berihu GebreyohannesEsayas ZarbaÎncă nu există evaluări
- Kirkegaard 2018Document16 paginiKirkegaard 2018mbadaroÎncă nu există evaluări
- Recommodation For Technical Approval of Offshore Wind TurbineDocument61 paginiRecommodation For Technical Approval of Offshore Wind TurbineJACKÎncă nu există evaluări
- Integrating Wind Energy in ERCOT: Warren Lasher Manager, System AssessmentDocument27 paginiIntegrating Wind Energy in ERCOT: Warren Lasher Manager, System Assessmentsupering143Încă nu există evaluări
- A Robust Biomimetic Blade Design For Micro Wind TurbinesDocument11 paginiA Robust Biomimetic Blade Design For Micro Wind Turbineselson.study.workÎncă nu există evaluări
- Suzlon Doc03Document138 paginiSuzlon Doc03sachin93% (14)
- Wind Turbines - Design and ComponentsDocument49 paginiWind Turbines - Design and Componentsgentialbani100% (41)
- Ali Hamza Rizwan FNLDocument72 paginiAli Hamza Rizwan FNLHaris ChaudhryÎncă nu există evaluări
- NSW Small Wind Turbine Consumer GuideDocument78 paginiNSW Small Wind Turbine Consumer Guideanand sahuÎncă nu există evaluări
- Hybris IEPS 2022 GuideDocument63 paginiHybris IEPS 2022 Guideedi2805Încă nu există evaluări
- 700 - Web - Centro de Despacho Com AerogeradoresDocument41 pagini700 - Web - Centro de Despacho Com AerogeradoresAndré SuzukiÎncă nu există evaluări
- Amar AustraliaDocument31 paginiAmar AustraliabalaÎncă nu există evaluări
- Simulation and Modeling of Wind Turbine Using PMSG-KKSDocument5 paginiSimulation and Modeling of Wind Turbine Using PMSG-KKSRobbyo Ardiles PÎncă nu există evaluări
- Full ReportDocument44 paginiFull ReportCes ShengÎncă nu există evaluări
- Vertical Axis Wind TurbinepdfDocument100 paginiVertical Axis Wind TurbinepdfGodfrey EmilioÎncă nu există evaluări
- Guidance - Good Practice During Wind Farm ConstructionDocument83 paginiGuidance - Good Practice During Wind Farm ConstructionFrancoÎncă nu există evaluări
- Pass m00 Wind Farm BrochureDocument8 paginiPass m00 Wind Farm Brochureluisbitron1527Încă nu există evaluări
- Ajkfluids2015-28124: Optimization of Looped Airfoil Wind Turbine (Lawt) Design Parameters For Maximum Power GenerationDocument7 paginiAjkfluids2015-28124: Optimization of Looped Airfoil Wind Turbine (Lawt) Design Parameters For Maximum Power GenerationAbdullah HashimÎncă nu există evaluări
- Catalogo g9x 20 MW EngDocument11 paginiCatalogo g9x 20 MW EngJosé E. MartínezÎncă nu există evaluări
- WECC Approved Dynamic Model Implementation Schedule July 2014 v0Document2 paginiWECC Approved Dynamic Model Implementation Schedule July 2014 v0puja_shinde9Încă nu există evaluări
- Seminar ScriptDocument8 paginiSeminar ScriptSophia DawsonÎncă nu există evaluări
- PSSE 2nd Generation Wind Models Final JayDocument32 paginiPSSE 2nd Generation Wind Models Final Jayhizbi7100% (1)
- Wind Turbine Anchor SolutionsDocument8 paginiWind Turbine Anchor SolutionsplatanospanosÎncă nu există evaluări
- Vestas V 112 WebDocument20 paginiVestas V 112 WebPaul PandreaÎncă nu există evaluări