S-ar putea să vă placă și
- Control RobustoDocument9 paginiControl Robustoalan_zero100% (2)
- Control RobustoDocument17 paginiControl RobustoDino J Morales100% (1)
- Control RobustoDocument19 paginiControl RobustoxxzvicÎncă nu există evaluări
- Control Por Ubicación de Polos, Sistema Ball and BeamDocument11 paginiControl Por Ubicación de Polos, Sistema Ball and BeamGregory Cárdenas-MansillaÎncă nu există evaluări
- Operaciones Básicas Con Diagramas de BloquesDocument8 paginiOperaciones Básicas Con Diagramas de BloquesSergio TarcayaÎncă nu există evaluări
- Control AutomaticoDocument4 paginiControl AutomaticoFreddy Muñoz RiffoÎncă nu există evaluări
- Sistemas de Control IDocument21 paginiSistemas de Control IEduard NuñezÎncă nu există evaluări
- Apuntes de Control AutomaticoDocument149 paginiApuntes de Control AutomaticoAlejandroInostroza0% (1)
- Historia Del Control AutomaticoDocument34 paginiHistoria Del Control AutomaticoFelipe UgarteÎncă nu există evaluări
- Control de LuminosidadDocument3 paginiControl de LuminosidadAlex GoreÎncă nu există evaluări
- Simulacion de Una Planta Con Scilab y XcosDocument7 paginiSimulacion de Una Planta Con Scilab y XcosEduardo AdameÎncă nu există evaluări
- Sistemas de Orden SuperiorDocument39 paginiSistemas de Orden SuperiorEdn P AguilarÎncă nu există evaluări
- 1er Examen Teoria ControlDocument3 pagini1er Examen Teoria ControlDaniela FloresÎncă nu există evaluări
- Compensadores de AdelantoDocument15 paginiCompensadores de Adelantosamuel0987516Încă nu există evaluări
- Control Predictivo Basado en Modelos-SICOMPCDocument10 paginiControl Predictivo Basado en Modelos-SICOMPCpoketupiÎncă nu există evaluări
- Diseño de Regulador LQR y Observador Por Ltro de Kalman Sistema Ball and Beam .Document4 paginiDiseño de Regulador LQR y Observador Por Ltro de Kalman Sistema Ball and Beam .Gregory Cárdenas-Mansilla100% (1)
- Diagrama de Bloques - Función de TransferenciaDocument6 paginiDiagrama de Bloques - Función de TransferenciaCristofer fernandez soteloÎncă nu există evaluări
- SEP Laboratorio 1Document67 paginiSEP Laboratorio 1miguelÎncă nu există evaluări
- Método de ZieglerDocument12 paginiMétodo de ZieglerRask Cesar ChambillaÎncă nu există evaluări
- Modelado en El Espacio de EstadosDocument3 paginiModelado en El Espacio de EstadosstvanÎncă nu există evaluări
- Módulo 2. PLCDocument41 paginiMódulo 2. PLCDavid LopezÎncă nu există evaluări
- Análisis de sistemas de control mediante variables de estadoDocument40 paginiAnálisis de sistemas de control mediante variables de estadoGustavo Omar Mesones MálagaÎncă nu există evaluări
- Compensadores en Atraso Usando El Método de RespuestaDocument15 paginiCompensadores en Atraso Usando El Método de RespuestaLuis RCÎncă nu există evaluări
- s4 - Sistemas de 2do OrdenDocument40 paginis4 - Sistemas de 2do OrdenChristian Guzman Trillo100% (1)
- Métodos sintonización lazo abierto cerrado procesosDocument7 paginiMétodos sintonización lazo abierto cerrado procesosChuchitoÎncă nu există evaluări
- Tomasi Capitulo 6Document40 paginiTomasi Capitulo 6Daniel MaldonadoÎncă nu există evaluări
- Informe Antiwindup-Grupo 05Document20 paginiInforme Antiwindup-Grupo 05Israel Silvestre Aguilar QuispeÎncă nu există evaluări
- Reglas Ziegler-Nichols sintonizar PIDDocument11 paginiReglas Ziegler-Nichols sintonizar PIDAdrianRmzÎncă nu există evaluări
- Entregable 1Document7 paginiEntregable 1Froylan MezaÎncă nu există evaluări
- Lab6 Linealizacion y Punto de OperacionDocument6 paginiLab6 Linealizacion y Punto de OperacionJohan Adrian Arcos SantacruzÎncă nu există evaluări
- Modelamiento Matematico de Sistemas Matlab PDFDocument12 paginiModelamiento Matematico de Sistemas Matlab PDFjuan carlos revillaÎncă nu există evaluări
- Levitador MagnéticoDocument5 paginiLevitador MagnéticoAlan Cruz RojasÎncă nu există evaluări
- Práctica IDocument4 paginiPráctica IJuan PerezÎncă nu există evaluări
- Control - Sintonia de Controladores PID Por Ziegler NicholsDocument12 paginiControl - Sintonia de Controladores PID Por Ziegler NicholsLuis Alberto SD100% (2)
- Analisis Temporal y Estabilidad MatlabDocument7 paginiAnalisis Temporal y Estabilidad MatlabJulian AvilaÎncă nu există evaluări
- 1.4 Diseño de Compensador Adelanto-Atraso y Controlador PIDDocument40 pagini1.4 Diseño de Compensador Adelanto-Atraso y Controlador PIDCondezoÎncă nu există evaluări
- Introduccion A MATLAB para Sistemas de ControlDocument12 paginiIntroduccion A MATLAB para Sistemas de ControlEduardo BarahonaÎncă nu există evaluări
- Modelado Variables de EstadoDocument5 paginiModelado Variables de EstadoAlex CarrascoÎncă nu există evaluări
- Métodos de Sintonización de ControladoresDocument8 paginiMétodos de Sintonización de Controladoreskevintk15Încă nu există evaluări
- Prensa inyección fundición automatizadaDocument2 paginiPrensa inyección fundición automatizadaAndrew PalaciosÎncă nu există evaluări
- Trabajo Monografia - FinalDocument26 paginiTrabajo Monografia - FinalJunior Tejada Sanchez100% (1)
- Laboratorio 1 Control DigitalDocument9 paginiLaboratorio 1 Control DigitalCM35Încă nu există evaluări
- Polos, Ceros y EstabilidadDocument12 paginiPolos, Ceros y EstabilidadLidi Román90% (31)
- Estabilidad de Sistema de Control DigitalDocument7 paginiEstabilidad de Sistema de Control DigitalKolb JavierÎncă nu există evaluări
- Ventajas de Lazo Cerrado y AbiertoDocument2 paginiVentajas de Lazo Cerrado y Abiertohassan9705100% (1)
- Importancia de La Instrumentación VirtualDocument7 paginiImportancia de La Instrumentación VirtualVILLAFUERTE GARCIA EDUARDOÎncă nu există evaluări
- Graficas Banda ProporcionalDocument18 paginiGraficas Banda ProporcionalMarcos JimenezÎncă nu există evaluări
- Ensayo de Control 1 (Control Digital)Document5 paginiEnsayo de Control 1 (Control Digital)Paul GuillenÎncă nu există evaluări
- Control RobustoDocument71 paginiControl RobustoExequiel100% (1)
- Taller 1 de Control AvanzadoDocument2 paginiTaller 1 de Control AvanzadoENRRIQUE PEÑAÎncă nu există evaluări
- Capitulo 2Document90 paginiCapitulo 2Axel AlvarezÎncă nu există evaluări
- Análisis de Sistemas de Control en El Espacio de EstadoDocument12 paginiAnálisis de Sistemas de Control en El Espacio de EstadoOmar QCÎncă nu există evaluări
- Nociones de Control RobustoDocument21 paginiNociones de Control RobustoRenzo Zuñiga CastilloÎncă nu există evaluări
- Diseño de Un Sistema de Control. José PenagosDocument9 paginiDiseño de Un Sistema de Control. José PenagosJosé PenagosÎncă nu există evaluări
- Plantilla - Trabajo (4) Proceso Productivo AutomatizadoDocument7 paginiPlantilla - Trabajo (4) Proceso Productivo Automatizadogiovanna silvaÎncă nu există evaluări
- Expo SimulacionDocument27 paginiExpo SimulacionOvidio DomínguezÎncă nu există evaluări
- Rediseño - de Una Planta Procesadora de QuinuaDocument93 paginiRediseño - de Una Planta Procesadora de QuinuaDaniel Barrenechea ChirinosÎncă nu există evaluări
- E 4 26 1-TE-07-1 - Métodos de Ajuste de ControladoresDocument26 paginiE 4 26 1-TE-07-1 - Métodos de Ajuste de ControladoresNico StroiliÎncă nu există evaluări
- Ajuste, puesta en marcha y regulación de los sistemas mecánicos. FMEE0208De la EverandAjuste, puesta en marcha y regulación de los sistemas mecánicos. FMEE0208Evaluare: 4 din 5 stele4/5 (1)
- Procesos auxiliares de fabricación en el mecanizado por corte y conformado. FMEH0209De la EverandProcesos auxiliares de fabricación en el mecanizado por corte y conformado. FMEH0209Încă nu există evaluări
- La Batalla de MaipúDocument44 paginiLa Batalla de MaipúRamiro Varas Fernandez100% (5)
- Instrucciones Splinter Cell UMD FULLDocument1 paginăInstrucciones Splinter Cell UMD FULLRamiro Varas FernandezÎncă nu există evaluări
- Acs800-07 HMDocument156 paginiAcs800-07 HMRamiro Varas FernandezÎncă nu există evaluări
- Manual CalderaDocument56 paginiManual CalderaRamiro Varas FernandezÎncă nu există evaluări
- Plan de intervención literatura infantilDocument8 paginiPlan de intervención literatura infantilRamiro Varas FernandezÎncă nu există evaluări
- InstruccionesDocument1 paginăInstruccionesRamiro Varas FernandezÎncă nu există evaluări
- Nitro Pro 10Document284 paginiNitro Pro 10Leo LeivaÎncă nu există evaluări
- MKX Fatalities BrutalitiesDocument6 paginiMKX Fatalities BrutalitiesChristopper MoralesÎncă nu există evaluări
- Evaluacion 1Document1 paginăEvaluacion 1Ramiro Varas FernandezÎncă nu există evaluări
- 1tipos de Habilidades Sociales - 2015Document11 pagini1tipos de Habilidades Sociales - 2015hector pardoÎncă nu există evaluări
- Caso Economía FPP (Tarea)Document5 paginiCaso Economía FPP (Tarea)Ramiro Varas FernandezÎncă nu există evaluări
- Plantilla Word IpchileDocument1 paginăPlantilla Word IpchileRamiro Varas FernandezÎncă nu există evaluări
- Manual CalderaDocument56 paginiManual CalderaRamiro Varas FernandezÎncă nu există evaluări
- Macro ClientesDocument3 paginiMacro ClientesRamiro Varas FernandezÎncă nu există evaluări
- 427 ET E 001.rev - CDocument28 pagini427 ET E 001.rev - CRamiro Varas FernandezÎncă nu există evaluări
- Project Profesional1Document20 paginiProject Profesional1Ramiro Varas FernandezÎncă nu există evaluări
- 427 ET E 001.rev - CDocument28 pagini427 ET E 001.rev - CRamiro Varas FernandezÎncă nu există evaluări
- 427 ET E 002.rev - 0Document26 pagini427 ET E 002.rev - 0Ramiro Varas FernandezÎncă nu există evaluări
- 427 DOC D 001.rev - CDocument17 pagini427 DOC D 001.rev - CRamiro Varas FernandezÎncă nu există evaluări
- Listado de Entregables PEAS N°1 PDFDocument6 paginiListado de Entregables PEAS N°1 PDFRamiro Varas FernandezÎncă nu există evaluări
- 427 BTA E 001.rev - 0Document36 pagini427 BTA E 001.rev - 0Ramiro Varas FernandezÎncă nu există evaluări
- 427 DOC D 001.rev - 0Document17 pagini427 DOC D 001.rev - 0Ramiro Varas FernandezÎncă nu există evaluări
- 427 ET E 002.rev - 0Document26 pagini427 ET E 002.rev - 0Ramiro Varas FernandezÎncă nu există evaluări
- Hoja Datos Pce TC 30 Camara TermoDocument2 paginiHoja Datos Pce TC 30 Camara TermoRamiro Varas FernandezÎncă nu există evaluări
- Zelio PeasDocument1 paginăZelio PeasRamiro Varas FernandezÎncă nu există evaluări
- 427 ET E 002.rev - CDocument25 pagini427 ET E 002.rev - CRamiro Varas FernandezÎncă nu există evaluări
- 427 ET E 001.rev - 0Document29 pagini427 ET E 001.rev - 0Ramiro Varas FernandezÎncă nu există evaluări
- 427 DOC D 001.rev - 0Document17 pagini427 DOC D 001.rev - 0Ramiro Varas FernandezÎncă nu există evaluări
- Observaciones de Proyecto Peas La PortadaDocument1 paginăObservaciones de Proyecto Peas La PortadaRamiro Varas FernandezÎncă nu există evaluări
- 427 DOC D 001.rev - CDocument17 pagini427 DOC D 001.rev - CRamiro Varas FernandezÎncă nu există evaluări
- Aplicación de La Integral en La BiologíaDocument15 paginiAplicación de La Integral en La BiologíaSebastian SalazarÎncă nu există evaluări
- Agrotecnologia - Año 2 - Numero 16 - 2012 - Paraguay - PortalguaraniDocument68 paginiAgrotecnologia - Año 2 - Numero 16 - 2012 - Paraguay - PortalguaraniPortalGuarani4Încă nu există evaluări
- TURBOMAQUINAS Unefa PDFDocument4 paginiTURBOMAQUINAS Unefa PDFCarlos RosalesÎncă nu există evaluări
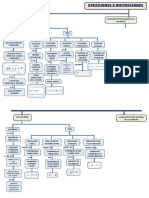
- Ecuaciones e InecuacionesDocument2 paginiEcuaciones e InecuacionesTamara Rosales Tandaipan100% (2)
- Ficha Tecnica Horno Max 750Document2 paginiFicha Tecnica Horno Max 750Carlos Alberto Ramirez Capia100% (1)
- CimentacionesDocument8 paginiCimentacionesHoward NavarroÎncă nu există evaluări
- Encantamiento Del Sueno (Genesis y El Don)Document6 paginiEncantamiento Del Sueno (Genesis y El Don)MMAK5Încă nu există evaluări
- Arquitectura Fluidos en La ConstruccionDocument4 paginiArquitectura Fluidos en La ConstruccionDanny RamirezÎncă nu există evaluări
- Sesión de Aprendizaje de Matemática 5toDocument4 paginiSesión de Aprendizaje de Matemática 5toRosario Del Pilar Papuico ManriqueÎncă nu există evaluări
- Cinemática IDocument8 paginiCinemática IceciliÎncă nu există evaluări
- Facot Escoglicol Plus FLD 160 S.tec - EsDocument3 paginiFacot Escoglicol Plus FLD 160 S.tec - EsFe AlcaÎncă nu există evaluări
- Informe de LaboratorioDocument76 paginiInforme de LaboratorioXangelx Cordero MachacaÎncă nu există evaluări
- ANTIACAROSDocument4 paginiANTIACAROSJorshshshÎncă nu există evaluări
- Determinacion de UmbralDocument4 paginiDeterminacion de Umbralluisa florezÎncă nu există evaluări
- Producción madera aserrada Eucalyptus UruguayDocument31 paginiProducción madera aserrada Eucalyptus Uruguayvhfdz11750% (1)
- Triptico de Lípidos 1Document2 paginiTriptico de Lípidos 1Ymer Altamirano Diaz75% (8)
- 1.esquema Comunicacion Jakobson 1Document4 pagini1.esquema Comunicacion Jakobson 1Patoo MezaÎncă nu există evaluări
- Calculo VectorialDocument7 paginiCalculo VectorialKevin SotoÎncă nu există evaluări
- MetalDocument53 paginiMetalda nÎncă nu există evaluări
- Metodo de Elementos Finitos-TrDocument33 paginiMetodo de Elementos Finitos-TrRoberto DavisÎncă nu există evaluări
- Sistema de Pararrayos MANACO S.A.Document18 paginiSistema de Pararrayos MANACO S.A.Cesar Vargas Medina100% (3)
- Mejora de suelos de fundación con estabilizantes químicosDocument4 paginiMejora de suelos de fundación con estabilizantes químicosCandidoMolanesÎncă nu există evaluări
- Calorimetría: Problemas de calor y cambio de estadoDocument1 paginăCalorimetría: Problemas de calor y cambio de estadoRecursos Para DocentesÎncă nu există evaluări
- CAPITULO - I (INTRODUCCION) Modelos-Errores PDFDocument24 paginiCAPITULO - I (INTRODUCCION) Modelos-Errores PDFAnonymous Szx8zyCmJgÎncă nu există evaluări
- Lista de Utiles 1Document9 paginiLista de Utiles 1eliana bolañosÎncă nu există evaluări
- MODELOS MATEMÁTICOS PARA LA PRODUCCIÓNDocument9 paginiMODELOS MATEMÁTICOS PARA LA PRODUCCIÓNciro terrazasÎncă nu există evaluări
- Funciones y sus propiedadesDocument19 paginiFunciones y sus propiedadesyo100% (3)
- Fluidos No NewtonianosDocument6 paginiFluidos No NewtonianosMarcelo NavarreteÎncă nu există evaluări
- Problemas Sobre DisolucionesDocument40 paginiProblemas Sobre DisolucionesSofia GarciaÎncă nu există evaluări
- Espectrografía - GoniómetroDocument6 paginiEspectrografía - GoniómetroVlado VargasÎncă nu există evaluări