Documente Academic
Documente Profesional
Documente Cultură
Cag - S - Zurita Operac - S - P Unexpo 2012-1
Încărcat de
Danswar PadrinoTitlu original
Drepturi de autor
Formate disponibile
Partajați acest document
Partajați sau inserați document
Vi se pare util acest document?
Este necorespunzător acest conținut?
Raportați acest documentDrepturi de autor:
Formate disponibile
Cag - S - Zurita Operac - S - P Unexpo 2012-1
Încărcat de
Danswar PadrinoDrepturi de autor:
Formate disponibile
Sady Rafael Zurita R. CAG Operacin de Sistemas de Potencia.
1
UNEXPO VICE-RECTORADO PUERTO ORDAZ
OPERACIN DE SISTEMAS DE POTENCIA
Prof. Ing. Sady Rafael Zurita R.
CONTROL AUTOMATICO DE GENERACION
INTRODUCCIN
El Control Automtico de Generacin (CAG), es un sistema de control de lazo
cerrado, el cual, en el pasado, fue implementado mediante tecnologa
electrnica analgica, y actualmente est disponible con tecnologa
esencialmente digital.
Especialmente, el proceso de evaluacin de la condicin carga-generacin
existente en el sistema de potencia, y el clculo de las acciones de control a
ejecutar sobre las unidades generadoras, se realiza, actualmente, empleando
programacin digital.
Los principales objetivos del CAG son los siguientes:
1. Mantener la frecuencia del sistema de potencia en el valor programado.
2. Mantener la potencia de intercambio neto, entre las reas de control, en
su valor programado.
3. Mantener la potencia de salida de cada generador, dentro del rea de
control, en el valor deseado. Este valor es, usualmente, el valor ptimo
calculado por el programa de Despacho Econmico.
El CAG es usualmente denominado Control Secundario de Potencia Activa,
mientras que las acciones de control del Gobernador de Velocidad y del
Despacho Econmico, se les identifica como Control Primario y Control
Terciario, respectivamente.
En este documento se describen las caractersticas principales de un CAG
digital, destacndose los aspectos tericos y prcticos de mayor relevancia.
Adicionalmente, para una adecuada comprensin de algunos fundamentos del
control de frecuencia, se revisan conceptos de control de frecuencia mediante el
gobernador de velocidad en un sistema de potencia, as como el rol de la
caracterstica de respuesta de la carga ante cambios en la frecuencia del
sistema.
Sady Rafael Zurita R. CAG Operacin de Sistemas de Potencia.
2
3.1. ACCION DE CONTROL PRIMARIO DE LA FRECUENCIA (ACCION DEL
GOBERNADOR DE VELOCIDAD)
La frecuencia del sistema sirve como indicacin de la posible existencia de
cualquier des-balance carga-generacin. Normalmente, una cada de frecuencia
est asociada a un incremento de carga y/o prdida de generacin, mientras que
un incremento de frecuencia est asociado a una reduccin de la carga. Esta
caracterstica permite que sea utilizada para restablecer el balance referido, y en
consecuencia estabilizar la frecuencia, mediante el control de la potencia activa
de salida de los generadores, gracias al efecto de regulacin continua del
gobernador de velocidad.
La accin del gobernador se origina al detectar ste la desviacin de frecuencia
entre el valor programado (usualmente 60 Hz, en Venezuela) y la frecuencia
medida en el momento, procediendo entonces a travs de servomotores, a
actuar sobre las vlvulas de admisin de las turbinas, en las unidades
termoelctricas, o sobre las paletas mviles o directrices en las turbinas de las
unidades hidroelctricas.
3.1.1. Dinmica de un Sistema Carga-Generacin sometido a una pequea
perturbacin de carga.
La dinmica que se produce en un sistema carga-generacin puede visualizarse
analizando dicho sistema, partiendo de una condicin inicial balanceada, es
decir, con carga igual a la generacin y cero desviacin de frecuencia, sometido
entonces a una perturbacin consistente a un pequeo incremento de carga.
Cuando ocurre el incremento de carga, la energa requerida por la carga,
inicialmente, proviene de la energa cintica almacenada en el equipamiento
rotativo del sistema (generadores y motores). Esta reduccin de energa cintica
del sistema se traduce en una disminucin de la velocidad y frecuencia del
sistema.
Este descenso contina hasta que la reduccin de velocidad (frecuencia) es
detectada por los gobernadores de velocidad, procediendo stos a incrementar
la potencia activa de salida de las unidades generadoras, al actuar sobre las
vlvulas de admisin o paletas directrices de las correspondientes turbinas, con
el objeto de detener la cada de frecuencia y lograr, mediante una oscilacin
positivamente amortiguada, estabilizar la frecuencia en un valor menor al valor
inicial previo a la perturbacin.
La referida correccin de potencia de los generadores se detiene cuando el
cambio (incremento, en este caso) de generacin del sistema, equilibra el
cambio neto de carga experimentado. Cambio neto por cuanto algunas
cargas son sensibles a la frecuencia y, en consecuencia, disminuyen al
reducirse la frecuencia.
Sady Rafael Zurita R. CAG Operacin de Sistemas de Potencia.
3
3.1.2. Aportes de los generadores en funcin del Droop Esttico (R) del
Gobernador
La contribucin de cada unidad generadora, bajo actuacin del gobernador de
velocidad, est en funcin de la caracterstica de Regulacin Esttica o Droop
Esttico del correspondiente gobernador.
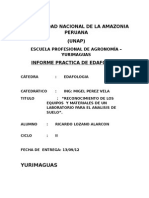
La Figura 3.1. muestra curvas de Droop de 4% y 6%, notndose que a mayor
valor del Droop, menor ser la contribucin que aportar la unidad para corregir
variaciones de frecuencia. Esto indica, obviamente, que unidades con un valor
de Droop muy alto prcticamente no contribuirn a la regulacin de frecuencia
por actuacin del gobernador.
Adicionalmente, se muestran curvas (paralelas) de igual Droop (4%), las cuales
representan valores diferentes de la potencia de salida de referencia, asignada
a la unidad generadora.
Ntese que el Droop Esttico representa, fsicamente, la cada de velocidad que
experimenta una unidad generadora al pasar de la condicin de vaco, a la
condicin de plena carga.
Matemticamente:
Pg
F
Pg
F
R
'
'
|
G
G
= [Hz/MW] Ec. 3.1
Fig.3.1. Droop Permanente Idealizado
En un sistema de N unidades, el Droop equivalente (R
s
) se calcula mediante:
1/Rs = 1/R
1
+ 1/R
2
+ ...+ 1/R
N
= 6 1/R
i
(i = 1.N)
1.02
1.01
1.00
1.05
1.04
1.03
1.06
0.99
P
g
(p.u)
1.0 P
g 3
P
g 2
4%
4%
4%
Droop = 6%
P
ref 1
P
ref 3
P
ref 2
Sady Rafael Zurita R. CAG Operacin de Sistemas de Potencia.
4
3.1.3. Actuacin del Control Automtico de Generacin (CAG).
Transcurrida la perturbacin originada por el incremento de carga antes citado,
el balance carga-generacin alcanzado por la accin del gobernador de
velocidad de cada unidad, se logra a una frecuencia inferior a la frecuencia
inicial.
Esta desviacin de frecuencia es entonces corregida mediante la accin
complementaria que provee el CAG, modificando la potencia de referencia de
salida (P
ref
) de cada generador, lo cual (en la Fig.3.1) tiene el efecto de
desplazar paralelamente a si misma la curva del Droop (por ejemplo,
desplazndola desde P
ref3
hasta P
ref2
).
La forma de calcular el nuevo valor de la potencia de referencia P
ref
es tratada
en las siguientes secciones.
3.1.4. Anlisis del Nuevo Balance Carga-Generacin, Incluyendo el Efecto
de la Frecuencia Sobre la Carga.
En la Fig.3.2. se muestra, esquemticamente, el efecto de un cambio de carga
'P
D
, sobre la frecuencia F, la potencia activa generada P
G
y la carga conectada
P
D
. En este grfico se han dibujado las curvas del Droop Esttico (R), y de la
Caracterstica de Respuesta de Frecuencia de la Carga (D).
Matemticamente: ] / [ Hz MW
F
P
F
P
D
D D
'
'
|
G
G
Ec. 3.2
El factor D es tambin denominado Factor de Amortiguamiento de la Carga.
En la Fig.3.2. se observa que el sistema, inicialmente, est operando a una
frecuencia F
1
. Se produce un incremento de carga 'P
D
, el cual da origen a la
dinmica ya explicada en la seccin 3.1.1., re-establecindose el balance carga-
generacin a la nueva frecuencia F
2
, mediante la contribucin de potencia de
dos componentes. El aporte de la turbina ('P
GF
), por la actuacin del
gobernador de velocidad, y el aporte de la carga ('P
DF
) debido a la reduccin de
la carga conectada, sensible a la frecuencia.
Matemticamente, se tiene que,
'P
D
= 'P
GF
+ 'P
DF
Ec. 3.3
Y como, de las ecuaciones 3.1 y 3.2 se deriva que,
'P
GF
= 'F / R y 'P
DF
= 'F D
Entonces: 'P
D
= ['F / R] + ['F D] = 'F [(1/R) + D] = 'F K Ec. 3.4
Sady Rafael Zurita R. CAG Operacin de Sistemas de Potencia.
5
Donde, K se denomina Caracterstica de Respuesta de Frecuencia del Area, y
representa el efecto combinado de la respuesta, ante cambios de frecuencia, de
los gobernadores de velocidad de las unidades generadoras, y de la carga
conectada al rea en referencia.
Como se ver en secciones posteriores, el conocimiento del valor de K es de
gran importancia para el correcto ajuste y desempeo del Control Automtico de
Generacin.
Obviamente, conocido el valor de K puede determinarse la cada, permanente,
de frecuencia, que producira un incremento de carga 'P
D
, mediante la ecuacin
'F = ['P
D
] / K Ec. 3.5
La contribucin, individual, de un generador, ante un incremento de carga 'P
D
,
el cual produce una cada permanente de frecuencia 'F, se calcula como sigue.
'P
GFi
= 'F / R
i
= [1/R
i
] ['P
D
/ K ] Ec. 3.6
Finalmente, en referencia a la Fig. 3.2., cabe sealar que para restituir la
frecuencia del sistema a su valor inicial (F
1
) es necesario cambiar la potencia de
referencia de salida del generador equivalente cuyo Droop se grafica en dicha
figura, en una cantidad equivalente al incremento de carga. En la grfica esto se
representa mediante el desplazamiento de la curva del Droop, paralelamente a
si misma, de la posicin P
ref1
a la posicin P
ref2
.
En la prctica, el cambio del valor de la potencia de referencia de salida del
generador (o generadores), puede realizarse mediante ajuste gradual y manual
por el operador en la planta, o mediante el Control Automtico de Generacin, si
tal sistema est disponible.
Sady Rafael Zurita R. CAG Operacin de Sistemas de Potencia.
6
Sady Rafael Zurita R. CAG Operacin de Sistemas de Potencia.
7
3.2. ACCION DEL CONTROL AUTOMATICO DE GENERACION.
Cuando dos o mas reas estn interconectadas, el intercambio de potencia
entre ellas, normalmente, se programa para que, durante un perodo de tiempo
dado, se intercambie una cantidad de potencia constante.
Si la carga en una de las reas cambia, la potencia entregada por todos los
generadores de las reas interconectadas se modificarn por la accin de los
gobernadores de velocidad (en funcin de sus droops), toda vez que la
frecuencia es nica en todo el sistema interconectado. Como resultado de este
proceso, tanto la frecuencia como las potencias de intercambios se habrn
desviado de sus valores programados. Estas desviaciones pueden ser
corregidas ajustando las potencias de referencia de los gobernadores de
velocidad, mediante el Control Automtico de Generacin.
3.2.1 Estructura de un Sistema de Control Automtico de Generacin
Digital.
En la Fig. 3.3. se muestran los principales elementos conceptuales que
conforman un Control Automtico de Generacin Digital.
En relacin a dicha figura, y a ecuaciones a emplear mas adelante, se
establecen las siguientes variables.
P
Int,i
= Potencia (MW) de intercambio telemedida en vnculo de interconexin i
(positiva para exportacin).
P
Int,n
=
n
i 1
P
Int,i
= Potencia de intercambio neta telemedida.
n = nmero de vnculos de interconexin.
P
o
Int,i
= Intercambio programado en vnculo de interconexin i (MW), (positivo
para exportacin).
P
o
Int,n
=
n
i 1
P
o
Int,i
= Potencia de intercambio neta programada.
P
gi
= Potencia generada en unidad i, telemedida, (MW).
P
ri
= Generacin requerida de la unidad i, (MW), calculada por el CAG.
f = frecuencia de la red, telemedida, (Hz).
f
o
= frecuencia programada (Hz).
P = Generacin requerida del Area, (MW), calculada por el CAG.
P
bi
= Potencia base de la unidad i, (MW), calculada por el Despacho Econmico.
A
i
= Factor de Participacin de la Unidad i, (adimencional), calculado por el
Despacho Econmico.
0 . 1
1
N
i
Ai ( N=nmero de generadores bajo control del CAG )
Sady Rafael Zurita R. CAG Operacin de Sistemas de Potencia.
8
En el esquema de la Fig.3.3., los valores de tiempo real de la potencia
intercambiada, y de la frecuencia del sistema, se miden y se comparan con sus
valores programados, para producir el Error de Control de Area (ECA).
Seguidamente, el ECA es procesado por el Algoritmo Controlador de Area para
determinar la generacin de potencia del rea (P), necesaria para conducir el
intercambio neto y la frecuencia, a sus valores programados, (es decir, para
lograr que el ECA sea cero). En la Seccin 3.2.2. se dan los detalles de este
procesamiento.
El Algoritmo de Asignacin de Potencia se encarga de calcular la distribucin de
la potencia P, entre las unidades que se encuentran bajo control del CAG,
aplicando criterios econmicos y operacionales. La salida de este algoritmo es
un conjunto de valores de potencia de referencia (P
ri
) los cuales se implementan
en las unidades generadoras de acuerdo al equipamiento de control instalado.
Si la planta que alberga al generador est dotada de un centro de control
computarizado, es usual que ste cuente con un programa de CAG, el cual se
encargar de controlar la unidad localmente, hasta llevarla al valor P
ri
calculado
y requerido por el CAG del Centro de Control del Area.
Si, por el contrario, no se cuenta con dicha capacidad de control local en la
planta, o no se desea controlar al generador localmente, la accin de control
necesaria para llevar al generador a la potencia de salida requerida, se puede
realizar remotamente mediante el Algoritmo Controlador de la Unidad, el cual
enviar pulsos de subir/bajar, directamente a la unidad generadora, controlando
el ajuste de la potencia de referencia de la turbina, hasta que se logre alcanzar
el valor P
ri
(ver Fig.3.3.).
3.2.2. Clculo del Error de Control de Area (ECA).
El ECA se calcula automticamente a una periodicidad determinada por la
ejecucin del CAG. Tpicamente, cada cuatro o seis segundos.
En el clculo del ECA se emplea la Ecuacin 3.7, en la cual, los valores
actuales de potencia de intercambio y frecuencia utilizados son el resultado del
filtraje digital de las tele-mediciones de dichas variables, a fin de minimizar el
posible efecto de ruido o perturbaciones en dichas mediciones.
ECA = C
1
[ P
o
Int,n
- P
Int,n
] + C
2
B [f
o
f ] Ec. 3.7
Donde,
ECA = Error de Control de Area (MW).
ECA > 0 significa deficiencia de generacin en el rea
B = Constante de Polarizacin de Frecuencia del rea (MW/Hz)
Sady Rafael Zurita R. CAG Operacin de Sistemas de Potencia.
9
C
1
y C
2
son constantes (de valor 1 o 0) que se fijan de acuerdo al modo de
control deseado.
Modo de Control Intercambio Neto Constante.
Este modo de control se establece fijando C
1
= 1 y C
2
= 0. Con lo cual se tiene.
ECA = P
o
Int,n
- P
Int,n
Ec. 3.8
En este caso, el CAG mantiene el intercambio neto en el valor programado, y no
responde a desviaciones en la frecuencia..
Tal modo de operacin puede ser til para controlar una pequea rea
conectada a un sistema grande, a fin de evitar que, ante perturbaciones en el
sistema grande, se produzca sobrecarga en la interconexin si existen
limitaciones de capacidad en dicho enlace.
Modo de Control Frecuencia Constante.
Este modo de control se establece fijando C
1
= 0 y C
2
= 1. Con lo cual se tiene.
ECA = B [ f
o
- f ] Ec. 3.9
Este es el modo de operacin tpico de sistemas aislados.
En el caso del Sistema Interconectado Nacional de Venezuela, (estando abierta
la interconexin con el sistema elctrico colombiano), se emplea este modo de
control, bajo la consideracin de que una sola de las empresas (CVG EDELCA)
asume la regulacin secundaria de frecuencia mediante su CAG (actuando
sobre generadores de dicha empresa), sin ejercer control (va CAG) de los flujos
en las interconexiones. El valor de la frecuencia programada, en el CAG de
CVG EDELCA, es fijado por OPSIS.
Modo Control de Intercambios con Polarizacin de Frecuencia.
Modo de control se establece fijando C
1
= 1 y C
2
= 1. Con lo cual ase tiene.
ECA = [P
o
Int,n
- P
Int,n
] + B [ f
o
- f ] Ec. 3.10
Este es el mtodo mas comnmente utilizado para regular la frecuencia de la red
y los intercambios de potencia entre las reas de un sistema interconectado.
Si los CAG de todas las reas del sistema interconectado estn operando en
este modo de control, sus sistemas CAG respondern a los errores de potencia
de intercambio y de frecuencia, y contribuirn a lograr los objetivos de que cada
Sady Rafael Zurita R. CAG Operacin de Sistemas de Potencia.
10
rea equilibre su generacin y carga, y restablezca la frecuencia a su valor
programado.
Cabe enfatizar que, en este modo de control, al ocurrir, en un rea, una
modificacin de la carga (incremento, por ejemplo), los generadores de todas las
reas participarn, de acuerdo al Droop de sus gobernadores de velocidad, en el
proceso de regulacin de la frecuencia hasta estabilizarla. Esto conducir a que,
adems de la desviacin de frecuencia, se produzcan desviaciones de los
intercambios reales respecto a los intercambios programados entre reas.
Si los sistemas de CAG, de las reas, estn correctamente ajustados, solamente
el CAG del rea donde se produjo el incremento de carga deber detectar
(mediante sus clculos), que debe incrementar la generacin de dicha rea, y
proceder en consecuencia, a fin de eliminar las desviaciones referidas de
intercambio y frecuencia.
Tales rasgos de este modo de control se evidencian en el ejemplo siguiente.
Ejemplo de Control de Intercambios con Polarizacin de Frecuencia.
Se tiene un Sistema de Potencia, formado por dos reas interconectadas
mediante una lnea de transmisin, bajo las siguientes condiciones.
P
Int,12
= Potencia exportada del Area1 al Area2.
P
Int,21
= Potencia exportada del Area2 al Area1
Con las condiciones iniciales,
P
o
Int,12
= 50 MW P
o
Int,21
= -50 MW f
o
= 60 Hz
Con los siguientes parmetros,
B
1
= K
1
= 200 Mw/Hz B
2
= K
2
= 250 MW/Hz
B
i
= Constante de Polarizacin de Frecuencia del Area i
K
i
= Caracterstica de Respuesta de Frecuencia del Area i
Asumamos que, inicialmente, el Area1 est exportando, al Area2, la cantidad
programada (50 MW), y que la frecuencia es la programada (f = f
o
= 60 Hz).
Si, ahora, se produce un incremento de carga 'P
D
, en el Area2, la frecuencia
caer, y el incremento de carga ser satisfecho (en estado estacionario) por la
carga liberada por la reduccin de frecuencia y por el incremento de
generacin debido a la accin de los gobernadores de velocidad en todos los
generadores del sistema interconectado.
Sady Rafael Zurita R. CAG Operacin de Sistemas de Potencia.
11
Asumiendo que la nueva frecuencia es 59.9 Hz, entonces, la desviacin en el
intercambio programado ser, aplicando la Ec. 3.5,
'P
Int,12
= 'f K
1
= [ 60.00 59.90 ] 200 = 20 MW
Por lo que,
'P
Int,21
= - 'P
Int,12
= -20 MW
En consecuencia,
P
Int,12
= P
o
Int,12
+ 'P
Int,12
= 50 + 20 = 70 MW
P
Int,21
= P
o
Int,21
+ 'P
Int,21
= -50 -20 = -70 MW
Luego, el CAG de cada rea calcular su correspondiente Error de Control de
Area, como sigue, para tomar las acciones correctivas que correspondan.
ECA
1
= [ P
o
Int,12
- P
Int,12
] + B
1
[ f
o
f ] = [ 50 70 ] + 200 [ 60.00 59.90] = 0 MW
ECA
2
= [ P
o
Int,21
- P
Int,21
] + B
2
[ f
o
- f ] = [-50-(-70)] + 250 [60.00 59.90] = 45 MW
Como el ECA
1
= 0, el CAG del Area1 no tomar accin alguna sobre sus
generadores, mientras que el CAG del Area2 modificar la potencia de salida de
sus generadores para lograr hacer cero su ECA.
En sntesis, el incremento de carga en el Area2, ha generado las siguientes
respuestas deseadas y previsibles:
- El Area1 ha asistido al Area2 durante su deficiencia de generacin
- La accin de control suplementario, de CAG, ocurre solo en el rea perturbada
- La accin del CAG del Area2 restaurar la frecuencia e intercambio a sus
valores programados
Consideraciones sobre la constante B.
Esta constante determina el grado de interaccin (derivado del CAG) cuando
ocurre una perturbacin.
Para un valor de B igual a la Caracterstica de Respuesta de Frecuencia del
Area (K), el sistema es no-interactivo para condiciones estacionarias, es decir,
se comporta como se ilustra en el ejemplo.
Si B se fija menor que K, el rea correspondiente no responder
adecuadamente para asumir su cuota de control en el sistema interconectado,
ocasionando que las otras reas asuman acciones de control que no le
corresponden.
Si B es fijado mayor que K, se produce una sobre-respuesta de control del CAG
en el rea, colocando igualmente una carga de control indebida en las otras
reas.
Sady Rafael Zurita R. CAG Operacin de Sistemas de Potencia.
12
3.2.3. Intercambio Inadvertido y Error de Tiempo.
El Intercambio Inadvertido es la integral de la desviacin (respecto al valor
programado), del intercambio neto de potencia, durante el tiempo en cual tal
desviacin se produce. En consecuencia, tiene dimensin de energa (MW-hr).
El Error de Tiempo es la integral de la desviacin de frecuencia (respecto al
valor programado), durante el perodo en el cual tal desviacin se produce. Se
mide en segundos.
Bajo condiciones normales del rea, y del sistema interconectado, el CAG
mantiene el intercambio y la frecuencia en sus valores programados.
Por otra parte, durante condiciones anormales o perodos de emergencia, los
intercambios de potencia cambian automticamente (por accin de los
gobernadores de velocidad), en correspondencia con las desviaciones de
frecuencia del sistema, para asistir al rea que en esos perodos presenta
deficiencias. Como consecuencia de esto, y de otros factores, se produce
acumulacin de Intercambio Inadvertido y de Error de Tiempo en el Sistema.
Para corregir el Error de Tiempo acumulado, se opera el sistema interconectado
a un valor de frecuencia programado mayor o menor de 60 Hz (de acuerdo al
signo del Error de Tiempo), por el lapso de tiempo necesario para corregir el
Error de Tiempo. Para lograr esta correccin se coloca dicho valor desviado
intencionalmente, como valor programado de frecuencia, en el CAG de cada
rea.
La correccin del Intercambio Inadvertido, normalmente, es realizado a travs de
acuerdos bilaterales entre las reas involucradas en dicha desviacin de
intercambio, con el pago correspondiente a la energa tomada en dicho perodo,
o mediante la devolucin de la energa tomada inadvertidamente.
3.2.4. Algoritmo Controlador del Area (ACA).
El objetivo del Algoritmo Controlador del Area (ACA) es procesar el Error de
Control de Area (ECA) de tal manera que se minimicen las desviaciones
transitorias de frecuencia y de potencia de intercambio, y que los errores, en
estado estacionario, de dichas cantidades tambin se minimicen y/o reduzcan a
cero.
Para alcanzar tal meta, usualmente, se emplea una ley de control proporcional-
integral, donde el control proporcional minimiza el error transitorio y el control
integral logra que el ECA se reduzca a cero en estado estacionario.
Sady Rafael Zurita R. CAG Operacin de Sistemas de Potencia.
13
La salida del Controlador indica la cantidad total de potencia que debe ser
generada en el rea, por todas las unidades bajo control del CAG.
En trminos matemticos,
P = C
P
[ECA] + [1/T
N
] [ECA] dt + P
0
Ec. 3.11
Donde P = Salida del Controlador=Requerimiento de Potencia del Area (MW)
C
P
, T
N
= Constantes del Controlador
P
0
= Valor inicial de la salida del Controlador
En forma discreta, la Ec. 3.11 es,
P
n
= C
P
[ECA]
n
+ [1/T
N
]
n
m 1
[ECA]
n
+ P
0
Ec. 3.12
Donde P
n
= Requerimiento de Potencia del Area a t = nT
s
(MW)
T
s
= Perodo de ejecucin del CAG (usualmente 4-6 segundos)
[ECA]
n
= ECA en la n-sima ejecucin
[ECA]
m
= ECA en la m-sima ejecucin
P
0
= Valor inicial de la salida del Controlador
= Suma de las potencias de salida de los generadores, bajo control
del CAG, en el momento de calcularse P
n
n = 1, 2, 3, ..
3.2.5. Algoritmo de Asignacin de Potencia (AAP).
El requerimiento de potencia del rea (P
n
) es distribuido, entre las unidades bajo
control del CAG, por el Algoritmo de Asignacin de Potencia.
El mtodo normalmente empleado, para distribuir P
n
, determina la potencia
asignada a cada generador con base en criterios de minimizacin de costos de
produccin, suministrados por la funcin Despacho Econmico.
A tal efecto, cada vez que se ejecuta, el Despacho Econmico calcula el Punto
Base (MW) y el Factor de Participacin de cada unidad (valor adimensional),
basado en la demanda total del rea y las curvas de costo de cada unidad
generadora.
As, la potencia a ser asignada, a una unidad i, viene dada como sigue.
P
ri
= P
bi
+ [P
n
-
N
i 1
P
bi
] A
i
Ec. 3.13
Sady Rafael Zurita R. CAG Operacin de Sistemas de Potencia.
14
Donde, P
ri
= Potencia asignada a la Unidad i (MW)
P
bi
= Punto Base de la Unidad i (MW)
A
i
= Factor de Participacin de la Unidad i (adimensional)
N
i 1
A
i
= 1.00 (N = nmero de unidades bajo control del CAG )
Los valores de P
bi
y de A
i
son actualizados por el Despacho Econmico cada
vez que se ejecuta, usualmente cada diez minutos.
Si no se desea que un determinado generador modifique su potencia de salida
por accin del CAG, (por ejemplo, si se tiene operando en carga base), su factor
de participacin se fija en cero.
Consideraciones sobre el valor P
ri
calculado para cada generador.
Una vez calculados los valores P
ri
, se verifica que satisfacen los lmites mximo
y mnimo de las unidades. Si el valor calculado para alguna unidad excede su
lmite, se coloca dicho lmite como valor asignado para la unidad, y la diferencia
entre este lmite y el valor P
ri
calculado es distribuida entre las dems unidades
que no estn limitadas. Este proceso se aplica para todas las unidades, y si, por
debilidades del sistema de generacin, todas las unidades resultaren limitadas
(sin capacidad para cumplir con el requerimiento de generacin), el CAG debe
generar una alarma, a fin de que el operador tome las acciones correctivas
necesarias, (por ejemplo, incorporacin de otras unidades al CAG, arranque de
unidades, incremento de la potencia que importa de otra rea, etc. ).
Deben respetarse las tasas de cambio de generacin (en MW/min), de las
unidades. En efecto, si la carga cambia en una cantidad muy importante en un
corto perodo de tiempo, podra ocurrir que algunas unidades no puedan seguir
el cambio de generacin requerido, porque tal requerimiento exceda su
capacidad de respuesta. En este caso, podran tomarse soluciones como las
siguientes.
1.- Las unidades mas rpidas podran tomar la carga que no pueda ser
generada por las mas lentas, y cuando las unidades lentas alcancen sus valores
de potencia requerida, se re-asignan a las unidades rpidas sus valores de
requerimiento de potencia ptimos deseados.
2.- No se asigna a las unidades rpidas la generacin que, por velocidad de
respuesta, tardan en entregar las unidades lentas, lo cual producir una
discrepancia transitoria entre la potencia requerida y la entregada.
La primera opcin da una solucin, pero al costo de mayor desgaste del
equipamiento mecnico involucrado, y a cierta desviacin del punto ptimo
econmico.
Sady Rafael Zurita R. CAG Operacin de Sistemas de Potencia.
15
La segunda opcin no tiene la debilidad de la primera, sin embargo, tiene como
consecuencia que las correcciones de las desviaciones de frecuencia y de
potencia de intercambio tomarn algn tiempo extra en materializarse.
3.2.6. Algoritmo Controlador de Unidad (ACU).
Como se explic en la Seccin 3.2.1., para las unidades que no cuentan con
capacidad de control local, (como el que pueden proveer centros de control de
plantas ), la potencia requerida de la unidad (P
ri
) es entregada al Algoritmo de
Control de Unidad, ste calcula el cambio a realizar en la potencia de referencia
de la turbina del generador, y enva pulsos de subir/bajar directamente al
sistema de gobernacin de la unidad generadora hasta llevarla al punto de
generacin deseado, (ver Fig. 3.4.).
En su proceso de control, el Algoritmo Controlador de la Unidad calcula el Error
de Control de la Unidad (ECU), y enva los pulsos de control hasta que el ECU
cae por debajo de una banda muerta establecida en funcin de la sensibilidad de
la turbina.
ECU = P
ri
- P
gi
+ [1/R] 'f Ec. 3.14
Donde, 'f = f
o
- f
R = Droop Esttico de la unidad generadora
El trmino 'f/R, en la Ec. 3.14, se incluye para coordinar el control suplementario
del CAG, con la respuesta primaria requerida del gobernador de velocidad de la
unidad, ante cambios en la carga del sistema interconectado. Esto permite que
la unidad retenga la caracterstica de lnea recta de su droop.
Transmisor
Turbina
Unidad i
Sistema de
Transmision
y Carga
Sistema de
Gobernacion
de Velocidad
Unidad i
Receptor
Calculos
ECA
Receptor
Transmisor
Transmisor
Receptor
Algoritmo
Controlador
de Area
Algoritmo de
Asignacion
de Potencia
Algoritmo
Controlador
de Unidad
Sistema Primario de
Control de Velocidad
P
Int,i
I
o
I
P
o
Int,i
ECA
P
A
i
P
bi
I
o
I
P
ri
P
gi
Pulsos
Subir / Bajar
Tasa de Cambio
Maxima de Gen. de
cada Unidad
P
gi
Linea de
Interconexion
Limites Alto y Bajo
de cada Unidad
SRZR
Del Despacho Economico
!"#$%$%$&'()*+,)+*-&./&+0&1"()/2-&345
ACU
Transmisor
Receptor
Ajuste de
vel./pot
Gobernador
de Turbina
Turbina
Transmisor
Receptor
ReI.de Potencia
I
Pulsos Subir/Bajar
I
o
I
P
ri
P
gi
P
gi
Sistema
Primario de
Control de
Velocidad
Fig. 3.4. Control de la Unidad Generadora
I Irecuencia actual
I
o
Irecuencia programada
P
ri
potencia requerida unidad i
P
gi
generacion actual unidad i
SRZR
S-ar putea să vă placă și
- Hipotesis Lineas de Transmision PDFDocument14 paginiHipotesis Lineas de Transmision PDFCR BraulioÎncă nu există evaluări
- Ensayo de Corte Directo (Consolidado y Drenado)Document21 paginiEnsayo de Corte Directo (Consolidado y Drenado)Alex Luna SalazarÎncă nu există evaluări
- Practica de Distribuciones de Probabilidad-AgronomiaDocument6 paginiPractica de Distribuciones de Probabilidad-AgronomiayenderÎncă nu există evaluări
- Practica 02 Inercia Rotacional de Una Esfera SolidaDocument5 paginiPractica 02 Inercia Rotacional de Una Esfera Solidadavidsantana96Încă nu există evaluări
- Atex IEC FinalDocument17 paginiAtex IEC FinalilcompaÎncă nu există evaluări
- Como Calcular El Consumo de EnergíaDocument2 paginiComo Calcular El Consumo de Energía10rodriguezÎncă nu există evaluări
- Equipos para La Mineria SubterraneaDocument17 paginiEquipos para La Mineria SubterraneaFabricio Agüero Marcelo100% (1)
- Instructivo Mmto Luminarias Roy Alpha - ModDocument3 paginiInstructivo Mmto Luminarias Roy Alpha - ModOscar Leonardo Rincon PulidoÎncă nu există evaluări
- Calderas HumotubularDocument4 paginiCalderas HumotubularMaximo Miranda VeraÎncă nu există evaluări
- Simulador TintayaDocument96 paginiSimulador TintayaFALCKOR100% (1)
- 4 Pilares Fundamentales para Una Relación Sana de ParejaDocument9 pagini4 Pilares Fundamentales para Una Relación Sana de ParejaGermán LarreaÎncă nu există evaluări
- Estudio de Combustion LatenteDocument16 paginiEstudio de Combustion LatenteVincent EscalaÎncă nu există evaluări
- Ip2902 Mecánica de Medios Continuos - Trabajo Conv OrdinariaDocument7 paginiIp2902 Mecánica de Medios Continuos - Trabajo Conv OrdinariaJuan Climaco CLÎncă nu există evaluări
- Taller 2Document32 paginiTaller 2SantiagoÎncă nu există evaluări
- Trabajo Manual AutozcvlavqeDocument14 paginiTrabajo Manual AutozcvlavqebetoÎncă nu există evaluări
- Practica 1Document14 paginiPractica 1Arizbeth PachecoÎncă nu există evaluări
- Tricalc Práctica 7 Definición de Losas de Cimentación y Vigas FlotantesDocument7 paginiTricalc Práctica 7 Definición de Losas de Cimentación y Vigas FlotantesAntonio Herrera PérezÎncă nu există evaluări
- Suma, Resta, Multiplicacion y Division.Document41 paginiSuma, Resta, Multiplicacion y Division.AndreaMacariosÎncă nu există evaluări
- El RasqueteadoDocument6 paginiEl RasqueteadoRichard Amaya PizarroÎncă nu există evaluări
- 7 Leyes Hermes TrimegistoDocument12 pagini7 Leyes Hermes TrimegistodiegoÎncă nu există evaluări
- Poe ShampooDocument6 paginiPoe ShampooGaBys Gabuchx's BabuchasÎncă nu există evaluări
- Tarea 4 Ejercicios Unidad 3 Julian Avila Grupo 301301 383Document5 paginiTarea 4 Ejercicios Unidad 3 Julian Avila Grupo 301301 383andrea33% (3)
- Informe de EdafologiaDocument20 paginiInforme de EdafologiaMilena RH100% (1)
- Copia de 5to. Grado - Vinculación Contenidos-ProyectosDocument19 paginiCopia de 5to. Grado - Vinculación Contenidos-ProyectossanguianocÎncă nu există evaluări
- Introduccion A La TermodinamicaDocument44 paginiIntroduccion A La TermodinamicaAdrian AllenÎncă nu există evaluări
- Almacenamiento de Semillas PDFDocument9 paginiAlmacenamiento de Semillas PDFKevin Torres BarrialesÎncă nu există evaluări
- Despacho Materiales PeligrososDocument25 paginiDespacho Materiales PeligrososAndrés Lupo100% (1)
- Guerrero Trip 110 Manual ServiceDocument30 paginiGuerrero Trip 110 Manual Servicegabriel100% (2)
- Capitulo 07 Menor Distancia PDFDocument110 paginiCapitulo 07 Menor Distancia PDFVictor AlvarezÎncă nu există evaluări
- Relacion y Operaciones Entre ConjuntosDocument9 paginiRelacion y Operaciones Entre ConjuntosBrayan GuillermoÎncă nu există evaluări