Documente Academic
Documente Profesional
Documente Cultură
Slides Platitude
Încărcat de
Hami DzicDrepturi de autor
Formate disponibile
Partajați acest document
Partajați sau inserați document
Vi se pare util acest document?
Este necorespunzător acest conținut?
Raportați acest documentDrepturi de autor:
Formate disponibile
Slides Platitude
Încărcat de
Hami DzicDrepturi de autor:
Formate disponibile
Commande des Syst`emes par Platitude
F. Rotella
Ecole Nationale dIngenieurs de Tarbes
rotella@enit.fr
26 mars 2004
0-0
F. Rotella Commande des syst`emes par platitude
'
&
$
%
1 Introduction
1. Introduction 5. Crit`eres de platitude
2. Denitions et consequences 6. Cas des syst`emes lineaires
3. Exemples pratiques 7. SPD
4. Un peu de formalisme 8. Conclusion
Introduction 1
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Introduction
La notion de platitude a ete introduite en 1992 par M. Fliess,
J. Levine, P. Martin et P. Rouchon;
nouveau point de vue en Automatique qui remet au centre de
la conception dune commande :
la tache que doit eectuer un processus sous la forme dune
trajectoire executable;
la fonction essentielle du bouclage qui est de corriger les
erreurs et rejeter les perturbations;
developpee initialement dans le cadre des syst`emes non
lineaires de dimension nie, elle peut etre appliquee dans
pratiquement toutes les autres situations : syst`emes ` a retards,
dimension innie, syst`emes lineaires, . . .
Introduction 2
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Exemple de sensibilisation
Considerons un robot manipulateur decrit par le mod`ele
dynamique en les variables articulaires q :
H(q(t)) q(t) + NL(q(t), q(t)) = (t),
o` u :
H(q) est la matrice dinertie (toujours denie positive);
NL(q(t), q(t)) est le vecteur des non linearites (Coriolis, gravite,
entranement, . . . );
(t) est le vecteur des couples articulaires.
Dans un premier temps, on consid`ere que les commandes sont les
couples articulaires.
Introduction 3
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Couple calcule
La methode intuitive du couple calcule donne le bouclage
statique :
(t) = H(q(t))v(t) + NL(q(t), q(t)), (1)
qui conduit au syst`eme lineaire decouple :
q(t) = v(t).
Ainsi lon voit que si lon desire faire executer une trajectoire au
robot sous la forme dun deplacement articulaire q
d
(t) sur un
intervalle de temps t = [t
I
, t
F
] on peut calculer les commandes
`a imposer sous la forme :
d
(t) = H(q
d
(t)) q
d
(t) + NL(q
d
(t), q
d
(t)).
Cela constituera le premier point important de la platitude.
Introduction 4
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Suivi de trajectoire
Deuxi`eme point important : si lon impose
d
(t) au niveau des
commandes daxes du robot, limprecision des valeurs des
param`etres du mod`eles, les perturbations et les conditions initiales
mal connues font que la trajectoire desiree q
d
(t) ne va pas etre
exactement executee.
Si dans (1) on fait :
v(t) = q
d
(t) +k
1
( q
d
(t) q(t)) +k
0
(q
d
(t) q(t)),
o` u k
1
et k
0
sont deux matrices diagonales positives alors la
commande :
(t) = H(q(t))( q
d
(t)+k
1
( q
d
(t) q(t))+k
0
(q
d
(t)q(t)))+NL(q(t), q(t)),
conduit `a une erreur q
d
(t) q(t) qui tendra asymptotiquement vers
0.
Introduction 5
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Prise en compte des actionneurs
En robotique, les actionneurs sont de la forme :
i
(t) =
k
p(p
2
+a
1
p +a
0
)
U
i
(t),
U
i
(t) : commandes envoyees aux cartes daxes. Comme :
U
i
(t) =
1
k
(
(3)
i
(t) +a
1
(2)
i
(t) +a
0
(1)
i
(t)),
on arrive nalement ` a :
U(t) = (q
(5)
(t), . . . , q(t), q(t)).
On peut appliquer les principes de commande precedents.
Introduction 6
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Trajectoire dans lespace operationnel
Soit X(t) les coordonnees operationnelles du robot : ensemble des
variables independantes qui denissent la position et lorientation
de lorgane terminal.
En robotique, on cherche `a se deplacer dans lenvironnement du
robot : les trajectoires sont denies dans lespace operationnel sous
la forme X
d
(t).
Mod`ele geometrique :
g(X) = f(q),
mod`ele geometrique direct (local) : X = F(q);
mod`ele geometrique inverse (local) : q = F
1
(X) = G(X).
Introduction 7
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Commande operationnelle
Comme : q = G
X
X, . . . , q
(k)
= (X, . . . , X
(k)
), . . .
U(t) = (X
(5)
(t), . . . ,
X(t), X(t)).
Ce qui permet de faire la commande directement dans lespace
operationnel :
par generation de trajectoire (boucle ouverte) :
U
d
(t) = (X
(5)
d
(t), . . . ,
X
d
(t), X
d
(t));
par poursuite de trajectoire (boucle fermee) :
U(t) = (X
(5)
d
(t) +
4
X
i=1
k
i
(X
(i)
d
(t) X
(i)
(t)), . . . ,
X(t), X(t)).
Introduction 8
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Points mis en evidence
on a parametre les solutions sans integrer de syst`eme
dierentiel;
ce parametrage na pas ete remis en cause par des mises en
serie (actionneurs, fonctions de sorties);
il permet de construire :
une commande boucle ouverte = generation de trajectoire;
une commande boucle fermee = poursuite de trajectoire.
Lensemble des variables permettant de parametrer les autres
constitue :
une sortie plate du syst`eme
Constatation : la sortie plate nest pas unique.
Introduction 9
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Quelques liens sur Internet
Documents ou simulations telechargeables :
http://cas.ensmp.fr/ petit/ensta/
P. Martin, N. Petit : Commande des syst`emes non
lineaires, le point de vue des syst`emes plats;
http://cas.ensmp.fr/levine/Enseignement/index.html
J. L
evine : Introduction `a la commande non lineaire;
http://cas.ensmp.fr/rouchon/
P. Rouchon : exemples, cours et transparents
http://math.polytechnique.fr/xups/vol99.html
P. Martin, P. Rouchon : Syst`emes plats, planication et
suivi de trajectoires.
J.M. Coron : Quelques resultats sur la commandabilite . . .
Introduction 10
F. Rotella Commande des syst`emes par platitude
'
&
$
%
2 Denitions et consequences
1. Introduction 5. Crit`eres de platitude
2. Denitions et consequences 6. Cas des syst`emes lineaires
3. Exemples pratiques 7. SPD
4. Un peu de formalisme 8. Conclusion
Denitions et consequences 11
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Denition dun syst`eme plat
Un syst`eme deni par lequation :
( x(t), x(t), u(t)) = 0,
o` u u(t) est la commande, est plat sil existe un vecteur z(t) et trois
entiers , , et tels que :
z(t) = h(x(t), u(t), u
(1)
(t), . . . , u
()
(t)), (2)
dont les composantes soient dierentiellement independantes;
et tel que :
x(t) = A(z(t), z
(1)
(t), . . . , z
()
(t)), (3)
u(t) = B(z(t), z
(1)
(t), . . . , z
()
(t)). (4)
Denitions et consequences 12
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Remarques (1)
1. Cette denition nest pas restreinte aux mod`eles detat, mais ` a
tout mod`ele de la forme :
(x
(n)
(t), . . . , x(t), x(t), u
(m)
(t), . . . , u(t)) = 0;
2. Pour une sortie y(t) = (x(t), u(t), . . . , u
(p)
(t)), on obtient :
y = C(z, . . . , z
()
). (5)
3. mutatis mutandis on peut denir la meme notion dans le cadre
discret :
on remplace alors derivation par avance.
Denitions et consequences 13
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Sortie plate
z(t) = h(x(t), u(t), u
(1)
(t), . . . , u
()
(t))
Une sortie plate est un ensemble de variables qui permet de
parametrer toutes les autres variables du syst`eme,
ou bien
Regroupe les variables libres du syst`eme,
Cest une variable endog`ene du syst`eme.
-platitude : lorsque z(t) depend de u(t), . . . , u
()
(t).
Denitions et consequences 14
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Remarques (2)
la relation (2) sappelle la relation dendogeneite : la sortie
plate nest construite qu` a partir des variables du syst`eme;
un bouclage qui nutilise quelle sera un bouclage endog`ene;
en dimension innie, nous verrons que la relation dendogeneite
est moins nette;
le nombre de sorties plates doit etre egal au nombre de
commandes : les commandes doivent etre libres;
une sortie plate nest pas unique : = (z), inversible;
la relation (3) est necessaire car elle permet de verier que z(t)
est eectivement la sortie plate dun syst`eme.
Denitions et consequences 15
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Exemple 1
Soit le syst`eme :
x
1
= x
2
, x
2
= u,
si on denit les variables :
1. z(t) = x
2
(t), malgre u(t) = z(t), elle ne peut etre consideree
comme sortie plate car on a seulement :
x
1
(t) = x
1
(t
0
) +
Z
t
t
0
z()d.
2. z(t) = x
1
(t), alors :
x
2
(t) = z(t) et u(t) = z(t),
qui indique que x
1
est une sortie plate de ce syst`eme.
Denitions et consequences 16
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Vers une inversion des syst`emes
- -
-
-
-
-
-
(.)
h(.)
B(.)
A(.)
u(t)
x(t) z(t)
x(t)
u(t)
Premi`ere consequence : planication de trajectoire.
Si on desire obtenir la trajectoire :
z
d
(t) pour t de t
0
`a t
f
,
il sut dimposer la commande (boucle ouverte) :
u
d
(t) = B(z
d
(t), z
(1)
d
(t), . . . , z
()
d
(t)).
Enseignement 1 : la trajectoire desiree doit necessairement etre au
moins fois derivable.
Denitions et consequences 17
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Les relations utiles
la relation (4) est celle qui va permettre de construire
lalgorithme de commande :
u(t) = B(z(t), z
(1)
(t), . . . , v(t)),
o` u v(t) est une nouvelle commande qui conduit au syst`eme
decouple :
z
()
(t) = v(t);
condition de decouplage :
B(.)
z
()
localement inversible;
la relation (5) est celle qui va permettre de relier les
comportements sur la sortie plate et la sortie du syst`eme.
Denitions et consequences 18
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Remarque sur les derivees de lentree
Supposons que lon ait :
z = h(x(t), u(t), u(t)).
Integrateur sur la commande (v(t) = u(t)) et :
X(t) =
_
_
x(t)
u(t)
_
_
,
conduit `a (
X(t), X(t), v(t)) = 0 et z = h(X(t), v(t)).
Les autres relations secrivent :
X(t) =
_
_
A(.)
B(.)
_
_
=
A(z(t), z
(1)
(t), . . . , z
(max(,))
(t)),
v(t) =
B(z(t), z
(1)
(t), . . . , z
(+1)
(t)).
Denitions et consequences 19
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Remarque (suite)
On aurait pu faire le meme raisonnement en rempla cant
lintegrateur par un syst`eme du premier ordre :
(u(t)) +(u(t))v(t) = u(t).
Ainsi, modulo des ltres en entree la sortie plate ne depend pas
vraiment des derivees de lentree.
Enseignement 2 : la mise en serie est une operation interne pour
lensemble des syst`emes plats.
Enseignement 3 : la dimension de letat perd son importance.
Denitions et consequences 20
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Exemple 2 : syst`emes chanes
Mod`ele :
x
1
= u
1
,
x
2
= u
2
,
x
3
= x
2
u
1
,
x
4
= x
3
u
1
,
.
.
.
x
n
= x
n1
u
1
;
Lelimination de u
1
donne pour i = 3 ` a n, x
i
= x
i1
x
1
. La derni`ere :
x
n
= x
n1
x
1
,
indique que la connaissance de (x
1
(t), x
n
(t)) permet dobtenir x
n1
.
Denitions et consequences 21
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Exemple 2 (suite)
On remonte ainsi de proche en proche de x
n2
`a x
2
puis ` a :
u
1
= x
1
,
u
2
= f( x
1
, x
n
, . . . , x
(n1)
1
, x
(n1)
n
).
=z =
h
x
1
(t) x
n
(t)
i
est une sortie plate.
Enseignement 4 : lelimination des commandes est une piste pour
mettre en evidence des sorties plates.
Denitions et consequences 22
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Exemple 3 : autres syst`emes chanes
Extension : Par le meme raisonnement, le syst`eme plus general :
x
1
=
1
(u
1
),
x
2
=
2
(u
1
, x
2
, . . . , x
n
)u
2
,
x
3
=
3
(u
1
, x
3
, . . . , x
n
) +
3
(u
1
, x
3
, . . . , x
n
)x
2
,
x
4
=
3
(u
1
, x
4
, . . . , x
n
) +
3
(u
1
, x
4
, . . . , x
n
)x
3
,
.
.
.
x
n1
=
n1
(u
1
, x
n1
, x
n
) +
n1
(u
1
, x
n1
, x
n
)x
n2
,
x
n
=
n
(u
1
, x
n
)x
n1
,
o` u
1
est une fonction inversible, admet egalement comme sortie
plate z
1
= x
1
, z
2
= x
n
.
Denitions et consequences 23
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Remarque (5)
1
est explicitement inversible, alors on peut ecrire
explicitement :
u
1
=
1
1
( x
1
),
et on a lexpression utilisable pour une commande par
platitude;
1
nest pas explicitement inversible (mais le theor`eme des
fonctions implicites est verie), alors on peut calculer
numeriquement :
pour chaque x
1
, u
1
tel que x
1
=
1
(u
1
),
et on na pas dexpression utilisable pour une commande par
platitude.
Comment faire dans ce cas?
Denitions et consequences 24
F. Rotella Commande des syst`emes par platitude
'
&
$
%
2 formes de platitude
Premi`ere forme Celle o` u les formules de platitude, surtout
u(t) = B(z(t), . . . , z
()
(t)), sont explicites :
Le syst`eme est explicitement plat.
Deuxi`eme forme Le syst`eme est plat mais on ne sait pas
extrairement les formules donnant letat et la commande :
Le syst`eme est numeriquement plat.
On ne peut calculer les commandes et les etats correspondant ` a
une trajectoire sur la sortie plate qu` a laide dun algorithme
numerique.
Enseignement 5 : bien que cela ne change pas la propriete de
platitude, on ne pourra pas appliquer les memes techniques de
commande
Denitions et consequences 25
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Exemple 4 : syst`eme numeriquement plat
Soit le reseau hydrographique `a quatre cuves :
- -
-
? ? ?
?
?
?
6
6
6
6
r r
u
1
u
2
(
1
) (
2
)
q
1
q
A
q
2
q
B
q
2
q
1
h
1
h
2
h
A
h
B
d
1
d
2
(S
1
)
(S
2
)
(S
A
)
(S
B
)
Denitions et consequences 26
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Equations des cuves
q
1
(t) =
1
u
1
(t), q
1
(t) = (1
1
)u
1
(t),
q
2
(t) =
2
u
2
(t), q
2
(t) = (1
2
)u
2
(t),
S
A
h
A
(t) = q
2
(t) q
A
(t), S
B
h
B
(t) = q
1
(t) q
B
(t),
q
A
(t) = k
A
p
h
A
(t), q
B
(t) = k
B
p
h
B
(t),
S
1
h
1
(t) = q
1
(t) +q
A
(t) d
1
(t), S
2
h
2
(t) = q
2
(t) +q
B
(t) d
2
(t),
d
1
(t) = k
1
p
h
1
(t), d
2
(t) = k
2
p
h
2
(t).
k
i
: constantes relatives aux orices decoulements;
commandes : taux douvertures
1
et
2
, `a valeurs dans [0,1], des
derivations;
u
1
et u
2
: debits (non controles) alimentant le reseau
hydrographique.
Denitions et consequences 27
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Recherche de relations
Lelimination des commandes
1
and
2
donne :
S
A
h
A
+S
2
h
2
= k
A
h
A
k
2
h
2
+k
B
h
B
+u
2
,
S
B
h
B
+S
1
h
1
= k
B
h
B
k
1
h
1
+k
A
h
A
+u
1
.
Si on denit les volumes (quantites derivees) :
V
2A
= S
A
h
A
+S
2
h
2
,
V
1B
= S
B
h
B
+S
1
h
1
,
on obtient :
V
2A
u
2
= k
A
h
A
k
2
h
2
+k
B
h
B
,
V
1B
u
1
= k
B
h
B
k
1
h
1
+k
A
h
A
.
Denitions et consequences 28
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Syst`eme algebrique
En groupant ces deux ensembles on obtient un syst`eme dequations
non lineaires en les inconnues :
H =
h
h
A
h
B
h
1
h
2
i
T
.
Ce syst`eme est (localement) soluble si le theor`eme des fonctions
implicites est verie, soit si :
J(H(t)) =
_
_
S
A
0 0 S
2
0 S
B
S
1
0
k
A
2
h
A
k
B
2
h
B
0
k
2
2
h
2
k
A
2
h
A
k
B
2
h
B
k
1
2
h
1
0
_
_
,
est inversible.
Denitions et consequences 29
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Platitude du syst`eme des cuves
Ainsi, tant que :
S
1
S
B
k
B
k
1
r
h
1
h
B
+
S
2
S
A
k
A
k
2
r
h
2
h
A
6= 1,
z =
_
_
V
2A
V
1B
_
_
est une sortie plate du syst`eme.
On peut numeriquement obtenir H = H(z, z, u
1
, u
2
) et :
1
=
1
u
1
S
1
h
1
+k
1
p
h
1
k
A
p
h
A
2
=
1
u
2
S
2
h
2
+k
2
p
h
2
k
B
p
h
B
.
Syst`eme numeriquement plat
Mais ceci nest utile que pour la generation de trajectoire (BO).
Denitions et consequences 30
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Exemple 5 : Derivees des commandes
Syst`eme ` a deux commandes et a < b :
x
(a)
1
= u
1
,
x
(b)
2
= u
2
,
x
3
= u
1
u
2.
Lelimination des commandes donne lintegrale premi`ere :
x
3
= x
(a)
1
x
(b)
2
.
Une integration par parties donne :
x
3
x
(a)
1
x
(b1)
2
(1)
= x
(a+1)
1
x
(b1)
2
.
Denitions et consequences 31
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Exemple 5 : Recherche dune sortie plate
Apr`es b integrations par parties successives :
_
_
x
3
x
(a)
1
x
(b1)
2
+x
(a+1)
1
x
(b2)
2
+ + (1)
b
x
(a+b1)
1
x
2
| {z }
_
_
(1)
=
(1)
b
x
(a+b)
1
x
2
.
Conduit `a choisr comme sortie plate (x
1
, ).
Verication :
x
2
= (1)
b
(1)
x
(a+b)
1
, x
3
= +x
(a)
1
x
(b1)
2
x
(a+1)
1
x
(b2)
2
+ ,
u
1
= x
(a)
1
, u
2
= x
(b)
2
.
Denitions et consequences 32
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Remarques sur lexemple 5
1. Comme x
(a)
1
= u
1
, secrit en eliminant les derivees de x
1
, et
en conservant les variables detat x
3
, x
2
`a x
(b1)
2
:
= x
3
u
1
x
(b1)
2
+u
(1)
1
x
(b2)
2
+ + (1)
b
u
(b1)
1
x
2
.
2. Enseignement 6 : apr`es avoir elimine les commandes, les
variables candidates `a etre sorties plates sont celles qui sont
derivees dans les relations algebriques donnant les autres
variables.
Denitions et consequences 33
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Recherche des sorties plates
Pour un syst`eme :
( x(t), x(t), u(t)) = 0,
un moyen de mettre en evidence les sorties plates consiste :
1. ` a construire le mod`ele implicite obtenu en eliminant les
commandes :
(x
(n)
(t), . . . , x(t), x(t)) = 0;
2. ` a chercher ` a exprimer algebriquement certaines variables en
fonctions des autres variables et de leur derivees;
3. les variables derivees sont candidates ` a etre sorties plates.
Exemple : le convertisseur Continu-Continu
Denitions et consequences 34
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Exemple 6 : Syst`eme implicite
Soit le syst`eme regi par les integrales premi`eres :
x
1
+ x
3
x
4
= 0, x
2
+ (x
1
+ x
3
x
4
)x
4
= 0.
Soit = x
1
+ x
3
x
4
, alors on a :
= x
(3)
3
x
4
,
x
2
+x
4
= 0.
Exercice : montrer que les couples (, x
3
) ou (, x
4
) ne peuvent etre
considerees comme sorties plates.
Denitions et consequences 35
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Exemple 6 (suite)
Question : comment trouver une sortie plate?
Astuce : lelimination de x
4
donne :
= x
2
x
(3)
3
=
2
2
(1)
.
Une integration par parties (cf. exemple precedent) donne :
2
2
+x
2
x
(3)
3
(1)
= x
2
x
(4)
3
Sorties plates candidates : z
1
= x
2
x
(3)
3
+
2
2
et z
2
= x
3
.
Denitions et consequences 36
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Exemple 6 (suite)
Verication :
x
2
=
z
1
x
(4)
3
, =
q
2(x
4
x
2
x
(3)
3
),
x
4
=
x
(3)
3
, x
1
= x
(2)
3
x
4
.
Remarque : 4 variables, 2 relations
=
_
_
2 composantes pour la sortie plate;
2 variables libres;
2 commandes.
Denitions et consequences 37
F. Rotella Commande des syst`emes par platitude
'
&
$
%
De limplicite `a lexplicite
Observation : les commandes font apparatre les derivees dordre le
plus elevees des sorties plates.
Pour lexemple 6, dans x
1
et x
4
, on trouve x
(5)
3
, donc :
u
1
= x
1
et u
2
= x
4
Cela ne sut pas car x
1
et x
4
sont presentes dans les equations.
Astuce : on ajoute des integrateurs :
u
1
= x
1
et u
2
= x
4
,
soit :
x
(2)
3
=
u
1
u
2
et x
2
= x
1
x
4
+
u
1
u
2
x
2
3
.
Denitions et consequences 38
F. Rotella Commande des syst`emes par platitude
'
&
$
%
De limplicite `a lexplicite (2)
En rajoutant lintegrateur :
x
3
= x
5
,
= Equation detat :
x
1
= u
1
,
x
2
= x
1
x
4
+
u
1
u
2
x
2
3
,
x
3
= x
5
,
x
4
= u
2
,
x
5
=
u
1
u
2
.
Enseignement 7 : la mise en evidence de la platitude est un moyen
de realiser un mod`ele implicite.
Denitions et consequences 39
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Consequence de la platitude
Comme la commande en boucle ouverte nest pas souhaitable, il y a
lieu de prevoir un bouclage assurant la poursuite de trajectoire.
Deux possibilites :
par commande non lineaire : par utilisation de la relation
explicite de la commande (4);
par linearisation et commande lineaire : par linearisation du
mod`ele autour de la trajectoire desiree.
Remarques :
la deuxi`eme technique est utilisable dans tous les cas;
on peut utiliser la platitude sur le mod`ele linearise.
Denitions et consequences 40
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Commande non lineaire par platitude
1. Generation de trajectoire en boucle ouverte = z
d
(t).
2. Linearisation et decouplage : si ` a partir de (4) on fait :
u = B(z, . . . , z
(1)
, v),
o` u v est la nouvelle commande, et si det B
z
() 6= 0, on obtient le
syst`eme lineaire decouple :
z
()
= v.
Remarques :
resultat `a comparer ` a la linearisation par bouclage des
syst`emes non lineaires;
decouplage sans dynamique des zeros;
un bouclage supplementaire de stabilisation est necessaire.
Denitions et consequences 41
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Bouclage stabilisant
La commande :
v = z
()
d
(t) +
1
X
i=0
k
i
(z
(i)
d
(t) z
(i)
(t)),
o` u K(p) = p
+
P
1
i=0
k
i
p
i
est un polynome de Hurwitz, conduit ` a :
u = B(z, . . . , z
(1)
, z
()
d
(t) +
1
X
i=0
k
i
(z
(i)
d
(t) z
(i)
(t))),
= (z, . . . , z
(1)
, K(p)z
d
(t)),
qui assure une poursuite de trajectoire asmptotique avec :
lim
t
(z
d
(t) z(t)) = 0.
u(t) sappelle un bouclage ENDOG
`
ENE
Denitions et consequences 42
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Structure I de commande
On met en uvre la structure de commande :
(.)
- -
-
?
u
y
z
d
z z
Processus
Il est evident quun observateur de z est necessaire
= probl`eme delicat en non lineaire.
Denitions et consequences 43
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Commande lineaire par platitude
1. Generation de trajectoire en boucle ouverte :
z
d
(t) 7(x
d
(t), u
d
(t), y
d
(t)).
2. Linearisation du mod`ele autour de cette trajectoire :
x(t) = A(t)x(t) +B(t)u(t),
y(t) = C(t)x(t) +D(t)u(t),
avec :
x(t) = x
d
(t) x(t), u(t) = u
d
(t) u(t), y(t) = y
d
(t) y(t).
3. Elaboration de la commande :
u(t) = B(z
d
(t), z
(1)
d
(t), . . . , z
()
d
(t)) u(t),
Denitions et consequences 44
F. Rotella Commande des syst`emes par platitude
'
&
$
%
4. Structure bouclee :
u(t) = K(p, t)y(t),
tel que le syst`eme :
K(p, t)
u
y
u
-
y
_
_
A(t) B(t)
C(t) D(t)
_
_
z
d
?
6
ait ses variables decart qui tendent vers 0.
Remarque : pour determiner K(p, t) on peut bien s ur utiliser la
platitude du syst`eme linearise!
Denitions et consequences 45
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Structure II de commande
On met en uvre la structure de commande :
K(p, t)
6
u
y
z
d
B(.) A(.)
Processus
+ +
u
y
u
d
y
d
-
? ?
- -
Dans cette structure, le cadre lineaire simplie la construction dun
observateur.
Denitions et consequences 46
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Generation de trajectoire sur z(t)
Contrainte : elle doit etre dierentiable ` a lordre ().
Premi`ere solution : trajectoires polynomiales par morceaux.
utilisation de polynomes dinterpolations;
la plupart du temps, conditions de continuite au depart et `a
larrivee;
on peut imposer des points de passage ou de rebroussement;
on peut prevoir des trajectoires de contournement.
Denitions et consequences 47
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Generation de trajectoire sur z(t) (2)
Deuxi`eme solution : optimisation en boucle ouverte.
Le crit`ere :
J =
Z
t
1
t
0
(y, u)dt,
secrit :
J =
Z
t
1
t
0
L(z, . . . , z
()
)dt.
La trajectoire optimale qui minimise ce crit`ere est solution de
lequation dEuler-Lagrange :
L
z
d
dt
L
z
(1)
+
d
2
dt
2
L
z
(2)
+ + (1)
dt
L
z
()
= 0.
On peut bien s ur combiner les deux solutions (e.g. splines cubiques,
courbes de Bezier, . . . ).
Denitions et consequences 48
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Generation de trajectoire sur y(t)
Souvent la sortie y(t) que lon veut asservir nest pas une sortie
plate : on ne peut, sans risques, generer une trajectoire directement
sur y(t).
Comment proceder?
1. On impose des points de passage, pour i = 0 ` a N, y(t
i
) = y
i
.
2. On impose des contraintes aux points darrets, pour i = 0 et N,
pour j = 1 ` a M, y
(j)
(t
i
) = y
i,j
.
3. On impose des contraintes (de continuites) aux points de
passage, pour i = 1 ` a N 1, pour j = 1 ` a M,
y
(j)
(t
i
) = y
(j)
(t
+
i
).
4. Compte tenu de y = C(z, . . . , z
()
), pour j = 0 ` a M,
y
(j)
= C
j
(z, . . . , z
(+j)
).
Denitions et consequences 49
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Generation de trajectoire sur y(t) (2)
1. Cela donne des contraintes, pour i = 0 et N, pour j = 1 ` a
+M, z
(j)
(t
i
) = z
i,j
.
2. On gen`ere la trajectoire z
d
(t) de t
0
`a t
N
qui verie ces
contraintes.
3. Cela donne la trajectoire sur y(t), y
d
(t) = C(z
d
(t), . . . , z
()
d
(t)).
4. Soit e(t) = y(t) y
d
(t) et E la tolerance maximale autorisee :
si max e(t) < E, on execute la commande
u
d
(t) = B(z
d
(t), . . . , z
()
d
(t));
si max e(t) > E, on ins`ere des points de passage
supplementaires et on reprend ` a letape 1.
Denitions et consequences 50
F. Rotella Commande des syst`emes par platitude
'
&
$
%
3 Exemples pratiques (et instructifs!)
1. Introduction 5. Crit`eres de platitude
2. Denitions et consequences 6. Cas des syst`emes lineaires
3. Exemples pratiques 7. SPD
4. Un peu de formalisme 8. Conclusion
Exemples pratiques (et instructifs!) 51
F. Rotella Commande des syst`emes par platitude
'
&
$
%
VTOL : Avion `a decollage vertical
-
6
~
A
A
B
B
B
J
J
Q
Qk
6
A
A
A
A
A
A
F
1
(t)
(t)
F
2
(t)
x(t)
h(t)
2l
Exemples pratiques (et instructifs!) 52
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Mod`ele du VTOL
Coordonnees reduites :
x =
x
G
g
, h =
h
G
g
, =
J sin
mg(l cos + sin)
,
u
1
=
(F
1
+F
2
) cos
mg
, u
2
=
(F
1
F
2
) sin
mg
.
Mod`ele dynamique (tr`es) simplie :
x
(2)
= sinu
1
+ cos u
2
,
h
(2)
= cos u
1
+ sinu
2
1,
(2)
= u
2
.
Exemples pratiques (et instructifs!) 53
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Commande decouplante du VTOL
Sortie :
y(t) =
_
_
x(t)
h(t)
_
_
1. Calcul des degres relatifs : r
1
= 2 et r
2
= 2.
2. Matrice de decouplage :
_
_
x
(2)
(t)
h
(2)
(t)
_
_
=
_
_
0
1
_
_
+
_
_
sin cos
cos sin
_
_
| {z }
B() : matrice de decouplage
_
_
u
1
(t)
u
2
(t)
_
_
.
3. Commande linearisante decouplante.
Exemples pratiques (et instructifs!) 54
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Comme det B() = et :
B()
1
=
_
_
sin cos
cos
sin
_
_
,
la commande non lineaire decouplante est :
_
_
u
1
(t)
u
2
(t)
_
_
=
_
_
sin cos
cos
sin
_
_
_
_
v
1
(t)
v
2
(t) + 1
_
_
.
4. Syst`eme boucle :
_
_
x
(2)
(t)
h
(2)
(t)
_
_
=
_
_
v
1
(t)
v
2
(t)
_
_
.
Exemples pratiques (et instructifs!) 55
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Inconvenient de cette commande
Si on lapplique, lavion se deplace bien mais part en looping.
Pourquoi?
Raison :
(2)
(t) = cos (t)v
1
(t) + sin(t)(v
2
(t) + 1).
Quand le syst`eme boucle est stabilise v
1
(t) et v
2
(t) tendent vers 0
et il reste :
(2)
(t) = sin(t),
qui est un syst`eme instable!
Probl`eme des zeros instables
Exemples pratiques (et instructifs!) 56
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Platitude du VTOL
Dapr`es les calculs precedents :
_
_
u
1
(t)
u
2
(t)
_
_
=
_
_
sin cos
cos
sin
_
_
_
_
x
(2)
(t)
h
(2)
(t) + 1
_
_
,
conduit `a :
(2)
(t) = cos (t)x
(2)
(t) + sin(t)(h
(2)
(t) + 1).
Astuce : on ajoute cos
2
+ sin
2
= 1, soit :
cos
x
(2)
cos
(2)
= sin(h
(2)
+ 1 sin
(2)
).
Or :
x
(2)
cos
(2)
= (x sin)
(2)
sin
2
,
h
(2)
sin
(2)
= (h + cos )
(2)
+ cos
2
.
Exemples pratiques (et instructifs!) 57
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Relations de platitude du VTOL
Comme :
cos (x sin
| {z }
X
)
(2)
= sin((h + cos
| {z }
H
)
(2)
+ 1).
Sorties plates : X = x sin et H = h + cos .
cos = sin = = (2k + 1)/2 si = 0 et tan = /
sinon :
= arctan
X
(2)
H
(2)
+ 1
;
sin =
X
(2)
X
(2)2
+(H
(2)
+1)
2
et cos =
H
(2)
X
(2)2
+(H
(2)
+1)
2
:
x = x(X, X
(2)
, H
(2)
), h = h(H, X
(2)
, H
(2)
);
Exemples pratiques (et instructifs!) 58
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Relations de platitude du VTOL
u
2
= u
2
(X
(2)
, H
(2)
, X
(3)
, H
(3)
, X
(4)
, H
(4)
);
X
(2)
= sin(u
1
2
) et H
(2)
+ 1 = cos (u
1
2
), donc :
u
1
=
q
X
(2)2
+ (H
(2)
+ 1)
2
+
2
= u
1
(X
(2)
, H
(2)
, X
(3)
, H
(3)
).
Enseignement : la sortie plate a souvent une intrepretation
physique
Ici : centre instantane de rotation
Exemples pratiques (et instructifs!) 59
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Commande par platitude du VTOL
Les relations de platitude indique = 4, donc il existe un bouclage
linearisant tel que :
X
(4)
= v
1
et H
(4)
= v
2
,
soit une dimension 8 du syst`eme en boucle fermee.
Remarque : comparer avec les dimensions :
6 du syst`eme;
4 du syst`eme boucle par le retour non lineaire precedent.
= bouclage dynamique de dimension 2
Exemples pratiques (et instructifs!) 60
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Probl`eme
Comment construire le retour detat necessaire?
Dans :
u
1
= u
1
(X
(2)
, H
(2)
, X
(3)
, H
(3)
)
u
2
= u
2
(X
(2)
, H
(2)
, X
(3)
, H
(3)
, v
1
, v
2
),
u
1
ne contient pas les nouvelles commandes;
on doit avoir X
(3)
et H
(3)
.
Exemples pratiques (et instructifs!) 61
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Construction du bouclage
Comme on cherche un bouclage decouplant on deroule lalgorithme
de commande non lineaire mais relativement aux sorties plates.
1. Avec = u
1
2
, soit u
1
= +
2
:
X
(2)
= sin, H
(2)
+ 1 = cos .
2. Apr`es 2 derivations, on doit avoir :
X
(4)
= sin
2
2 cos
cos u
2
sin
= v
1
,
H
(4)
= cos
2
2 sin
sinu
2
+ cos
= v
2
.
soit :
_
_
cos sin
sin cos
_
_
_
_
u
2
_
_
=
_
_
v
1
sin
2
+ 2 cos
v
2
+ cos
2
+ 2 sin
_
_
.
Exemples pratiques (et instructifs!) 62
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Bouclage
La resolution de ce syst`eme donne u
2
et
et le nombre detats est
complet.
1. Tant que 6= 0 :
2
v
1
sin +v
2
cos ,
u
1
= +
2
,
u
2
=
1
(v
1
cos +v
2
sin + 2
).
2. Bouclage stabilisant :
v
1
= X
(4)
d
+
3
X
i=0
k
1,i
(X
(i)
d
X
(i)
), v
2
= H
(4)
d
+
3
X
i=0
k
1,i
(H
(i)
d
H
(i)
),
Exemples pratiques (et instructifs!) 63
F. Rotella Commande des syst`emes par platitude
'
&
$
%
qui utilise les relations :
X = x sin,
H = h + cos ,
X
(1)
= x cos
,
H
(1)
=
h sin
,
X
(2)
= sin,
H
(2)
= cos 1,
X
(3)
= cos
+ sin
,
H
(3)
= sin
+ cos
.
Exemples pratiques (et instructifs!) 64
F. Rotella Commande des syst`emes par platitude
'
&
$
%
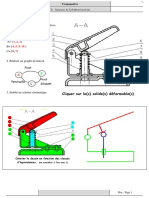
La voiture
-
6
@
@
@
@
@
@
@
@
@
@
@
@
@
@
@
@
.
.
.
.
.
.
.
.
x(t)
y(t)
F(t)
P
(t)
(t)
Exemples pratiques (et instructifs!) 65
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Mod`ele de la voiture
Commandes :
u : vitesse de P;
: angle de braquage des roues avant;
Mod`ele (roulement sans glissement) :
x = ucos ,
y = usin,
=
u
l
tan;
les coordonnees de P(x(t), y(t)) sont une sortie plate du
syst`eme
Exemples pratiques (et instructifs!) 66
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Preuve de la platitude
A partir dune trajectoire de P(x(t), y(t)) :
la direction de la tangente ` a la courbe donne ;
son module donne u;
le cercle osculateur (celui de la rotation instantanee de P)
donne
Exemples pratiques (et instructifs!) 67
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Relations de platitude
Sortie plate
h
x(t) y(t)
i
=
_
_
u(t) =
p
x
2
(t) + y
2
(t),
(t) = arctan
y(t)
x(t)
,
(t) = arctan
l( x(t) y(t) x(t) y(t))
p
x
2
(t) + y
2
(t)
3
!
,
Interpretation de la singularite ` a vitesse nulle :
on ne sarrete ni ne demarre brutalement;
si on tourne les roues `a u = 0, il ne se passe rien.
Exemples pratiques (et instructifs!) 68
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Traitement de la singularite
Lidee consiste ` a decoupler :
laspect geometrique de la trajectoire;
levolution sur cette trajectoire.
Solution :
parametrisation de labscisse curviligne (t) telle que, si T est la
duree du mouvement :
(0) = 0, (T) = 1, (0) = (T) = 0.
soit :
(t) =
t
T
3 2
t
T
.
Exemples pratiques (et instructifs!) 69
F. Rotella Commande des syst`emes par platitude
'
&
$
%
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
t/T
(
t
)
Exemples pratiques (et instructifs!) 70
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Traitement de la singularite
geometrie de la trajectoire :
h
x
d
() y
d
()
i
.
Comme x
02
() +y
02
() = 1 :
=
_
_
u(t) = (t),
(t) = arctan
y
0
x
0
,
(t) = arctan(l(x
0
(t)y
00
(t) x
00
(t)y
0
(t))) ,
Exemples pratiques (et instructifs!) 71
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Mise en uvre de la commande par platitude
La construction suit la meme demarche que pour lavion :
u et dependent de x
(2)
et y
(2)
donc il existe un bouclage tel
que :
x
(2)
= v
1
et y
(2)
= v
2
;
pour le construire, on derive 2 fois les sorties plates :
x
(2)
= ucos usin
= ucos
u
2
l
sin tan = v
1
,
y
(2)
= usin +ucos
= usin +
u
2
l
cos tan = v
2
,
soit :
_
_
cos
u
2
l
sin
sin
u
2
l
cos
_
_
_
_
u
tan
_
_
=
_
_
v
1
v
2
_
_
.
Exemples pratiques (et instructifs!) 72
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Bouclage dynamique
u = cos v
1
+ sinv
2
,
= arctan
l
u
2
(cos v
2
sinv
1
;
auquel on ajoute le retour stabilisant de poursuite de trajectoire :
v
1
= x
(2)
d
+k
1,1
(x
(1)
d
x
(1)
) +k
1,0
(x
d
x),
v
2
= y
(2)
d
+k
1,1
(y
(1)
d
y
(1)
) +k
1,0
(y
d
y),
soit :
v
1
= x
(2)
d
+k
1,1
(x
(1)
d
cos u) +k
1,0
(x
d
x),
v
2
= y
(2)
d
+k
1,1
(y
(1)
d
sinu) +k
1,0
(y
d
y);
Mais u nest plus la commande.
Exemples pratiques (et instructifs!) 73
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Traitement de la singularite
On realise :
u(t) = v(t) (t),
o` u v(t) est la nouvelle commande qui est egale ` a 1 sur la trajectoire
desiree. Comme :
d
dt
= (t)
d
d
,
Avec, suivant le choix de (t) :
(t) =
6t
T
3
(T t),
on obtient nalement comme commande par platitude qui assure la
poursuite asymptotique de la trajectoire (x
d
(t), y
d
(t)) :
Exemples pratiques (et instructifs!) 74
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Commande avec singularite
u(t) = v(t) (t),
v(t) = (t)(cos v
1
+ sinv
2
),
(t) = arctan
l
v(t)
2
(cos v
2
sinv
1
,
v
1
= x
(2)
d
+k
1,1
(x
(1)
d
cos u) +k
1,0
(x
d
x),
v
2
= y
(2)
d
+k
1,1
(y
(1)
d
sinu) +k
1,0
(y
d
y).
Enseignement : les singularites qui apparaissent dans B(.) sont
resolues par un decouplage :
de laspect geometrique avec la generation de trajectoire z
d
();
de levolution sur cette trajectoire par parametrisation de
labscisse curviligne (t).
Exemples pratiques (et instructifs!) 75
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Exemple simple
Soit le syst`eme :
x(t) +u(t)x(t) = u
5
(t).
o` u u(t) est la commande.
Theor`eme des fonctions implicites :
tant que 5u
4
(t) 6= x(t) : x(t) est une sortie plate.
Syst`eme numeriquement plat
Remarque : la commande u(t) ne doit pas verier
15 u
2
+ 5 uu +u
3
= 0
Exemples pratiques (et instructifs!) 76
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Consequence
Commande lineaire non stationnaire autour de la trajectoire desiree
(structure II de commande).
Avec x = x
d
x, u = u
d
u, (t) = 5u
4
d
(t) x
d
(t) et
X =
h
x x
i
:
X =
_
_
0 1
u
d
(t) 0
_
_
X +
_
_
0
(t)
_
_
u.
Matrice de commandabilite :
C
(A(t),B(t))
=
_
_
0 (t)
(t) (t)
_
_
.
Le syst`eme est commandable tant que 0 < (t) < .
Exemples pratiques (et instructifs!) 77
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Platitude du linearise
En lineaire platitude et commandabilite concident.
Lorsque cette condition est veriee :
u(t) =
1
(t)
[ x(t) +u
d
(t)x(t)] ,
qui montre le caract`ere plat de la sortie x(t).
A comparer avec la condition de platitude numerique.
Si la condition de commandabilite nest pas veriee on reparam`etre
labscisse curviligne.
Exemples pratiques (et instructifs!) 78
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Platitude du linearise
Commande par platitude du linearise :
u(t) =
1
(t)
[v(t) +u
d
(t)x(t)] ,
avec :
v(t) = x
d
(t) +k
1
( x
d
(t) x(t)) +k
0
(x
d
(t) x(t)).
Mais, comme on veut pour la structure compl`ete x
d
(t) 0, on
obtient directement :
u(t) =
1
(t)
[k
1
x(t) + (u
d
(t) k
0
)x(t)] = u
d
(t) u(t).
Exemples pratiques (et instructifs!) 79
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Commande compl`ete
u(t) = u
d
(t)
1
(t)
[k
1
x(t) + (k
0
u
d
(t))x(t)] ,
= u
d
(t)
[k
1
( x
d
(t) x(t)) + (k
0
u
d
(t))(x
d
(t) x(t))]
(t)
,
ce qui donne la commande nale :
u(t) = u
d
(t)
1
(t)
[k
1
x
d
(t) + (k
0
u
d
(t))x
d
(t)]
| {z }
d
(t)
_
_
consigne
1
(t)
[(u
d
(t) k
0
)x(t) k
1
x(t)]
| {z }
bouclage detat
.
Exemples pratiques (et instructifs!) 80
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Simulation
Trajectoire `a suivre : x
d
(t) = t
2
(3 2t) pour t de 0 `a 1;
Dynamique de poursuite : k
1
= 20, k
0
= 100 :
0 0.5 1 1.5
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Step Response
Time (sec)
A
m
p
litu
d
e
Temps de reponse ` a 2% : 0.6 seconde.
Exemples pratiques (et instructifs!) 81
F. Rotella Commande des syst`emes par platitude
'
&
$
%
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
x
d
(t)
x(t)
temps t, k1=20, k0=100, x(0)=1
Commande par platitude avec estimation grossi`ere de letat initial.
Exemples pratiques (et instructifs!) 82
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Exemples pratiques (et instructifs!) 83
F. Rotella Commande des syst`emes par platitude
'
&
$
%
4 Formalisme
(a little touch . . . )
1. Introduction 5. Crit`eres de platitude
2. Denitions et consequences 6. Cas des syst`emes lineaires
3. Exemples pratiques 7. SPD
4. Un peu de formalisme 8. Conclusion
Formalisme 84
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Formalismes
Plusieurs formalismes permettent de construire la notion de
platitude :
geometrie dierentielle de dimension nie et bouclage
linearisant : Charlet, Levine, 1989; Shadwick, 1990; Sluis, 1993;
Franch, 1999;
alg`ebre dierentielle : Jacubczyk, 1993, Fliess, Levine, Martin,
Rouchon, 1995; Aranda-Bricaire, Moog, Pomet, 1995;
geometrie dierentielle de dimension innie des jets : Pomet,
1993; van Nieusdadt, Rathinam, Murray, 1998; Fliess, Levine,
Martin, Rouchon, 1999; Pereira da Silva, Correa Filho, 2001,
Peut etre reliee ` a des travaux plus anciens : Hilbert, 1901, 1912,
Poincare, 1907, Cartan, 1914.
Formalisme 85
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Syst`emes
1. Syst`eme dierentiel (libre) :
= (X, f)
x = f(x), t R, x X R
n
;
= une trajectoire t 7x(t)
2. Syst`eme commande (force) :
u
= (X, f
u
)
x = f(x, u), t R, (x, u) X U R
n
R
m
;
= une innite de trajectoires t 7x
u
(t)
Formalisme 86
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Unication
Notion de trajectoire :
t 7 = (x(t)
T
, u(t)
T
, u(t)
T
, . . . , u
(k)
(t)
T
, . . . )
T
,
t R, M R
n
R
m
R
m
| {z }
-te de copies de R
m
= R
n
(R
m
)
cela permet davoir :
= (f(x, u)
T
, u
T
, . . . , u
(k)
T
, . . . )
T
= F().
Syst`eme commande :
= (M, F).
Formalisme 87
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Remarques
ce formalisme est celui des jets-innis;
meme formalisme pour les syst`emes implicites (,
) = 0;
on perd la notion de dimension de letat : soit
deni par :
x = f(x, u),
u = v,
que lon peut noter
X = (X, v) mais qui correspond `a la
representation :
(
X
T
, v
T
, . . . , v
(k1)
T
, . . . ) = (f(x, u)
T
, u
T
, u
T
, . . . , u
(k)
T
, . . . ).
Les deux syst`emes ont une dimension dierente mais la meme
representation;
commandes : variables independantes (ou libres) du syst`eme.
Formalisme 88
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Syst`eme trivial
Denition (evidente) du syst`eme trivial : y(t) = u(t).
Dans le formalisme des jets : T = ((R
m
)
, F) o` u :
F(y
T
0
, y
T
1
, y
T
2
, . . . ) = (y
T
1
, y
T
2
, . . . ).
Consequence : toute suite dintegrateurs est un syst`eme trivial.
y
(n)
= u,
Preuve : soit = (y
T
, . . . , y
(n1)T
, u
T
, u
T
, . . . , u
(k)T
, . . . )
T
, alors :
= ( y
T
, . . . , y
(n1)T
, y
(n)T
| {z }
u
T
, u
T
, . . . , u
(k)T
, . . . )
T
,
soit y
0
= y.
Formalisme 89
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Equivalence de syst`emes
Deux syst`emes (M, F) et (N, G) sont equivalents
si il existe une transformation inversible qui echange leurs
trajectoires.
Notons et une telle transformation et son inverse :
si est une trajectoire de F() alors = () est une
trajectoire de G() =
h
i
=()
F(());
si est une trajectoire de G() alors = () est une
trajectoire de F() =
h
i
=()
G(()).
Une telle transformation sappelle une transformation de
Lie-Backl und.
Formalisme 90
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Implication de lequivalence
Soit deux syst`emes LB-equivalents :
x = f(x, u) et y = g(y, v).
En notant u = (u, u, u, . . . ) et v = (v, v, v, . . . ), on les relations :
(x, u, u, u, . . .
| {z }
) = ((x, u)
| {z }
y
, (x, u)
| {z }
v
,
(x, u)
| {z }
v
, . . . ),
(y, v, v, v, . . .
| {z }
) = ((y, v)
| {z }
x
, (y, v)
| {z }
u
,
(y, v)
| {z }
u
, . . . ),
ce qui donne necessairement les relations entre variables :
_
_
_
y = (x, u),
v = (x, u),
et
_
_
_
x = (y, v),
u = (y, v).
Formalisme 91
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Remarques
Une transformation de Lie-Backl und :
ne conserve pas le nombre detats;
peut etre etendue aux syst`emes ` a temps variable et aux
changements de temps;
peut ne pas conserver le temps : lequivalence est alors orbitale :
y = (t, x, u) x = (, y, v)
v = (t, x, u) u = (, y, v)
= (t, x, u) t = (, y, v)
comme on est en dimension nie, k assez grand :
y = (t, x, u
k
), . . . , t = (, y, v
k
),
o` u u
k
= (u
T
, u
T
, . . . , u
(k)T
)
T
.
Formalisme 92
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Implication de lequivalence
Theor`eme 1 :
Si deux syst`emes sont L-B equivalents alors ils ont le meme nombre
de commandes.
Theor`eme 2 :
Si deux syst`emes sont L-B equivalents alors il existe un bouclage
dynamique endog`ene
et un changement de coordonnees qui transforme lun en lautre.
Formalisme 93
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Syst`eme plat
Rappel : un syst`eme est plat si on a les relations :
z = h(x, u), x = A( z), u = B( z),
Donc sil est equivalent ` a un syst`eme tel que y soit dans les
premi`ere composantes de z, soit le syst`eme trivial.
En resume :
Un syst`eme (M, F) est plat sil est equivalent au syst`eme trivial.
Consequence : le nombre de sorties plates est egal au nombre de
commandes.
Formalisme 94
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Exemple de syst`eme orbitalement plat
x
1
= u,
x
2
= u
2
.
Ce syst`eme nest pas plat, par contre si on fait la transformation :
= x
1,
y = x
2
,
on obtient le syst`eme plat :
dy
d
= u().
Formalisme 95
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Sortie plate = sortie linearisante
A partir de :
x = A(z, z
(1)
, . . . , z
()
) = A( z
).
Moyennant une permutation entre les variables, z
peut etre
partitionne en [, ] o` u R
n
, et :
rang (A/) = n.
Par le theoreme des fonctions implicites :
z(.), = z(x, ).
Ainsi :
= H(, , z
(+1)
) = a(x, , z
(+1)
),
u = B(, , z
(+1)
) = b(x, , z
(+1)
).
Formalisme 96
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Sortie plate = sortie linearisante (2)
Comme le bouclage par platitude consiste `a poser :
z
(+1)
= v,
le bouclage :
= a(x, , v),
u = b(x, , v),
conduit necessairement ` a la forme de Brunovski :
- syst`eme lineaire;
- sous forme canonique commandable;
- dont tout les coecients signicatifs sont nuls.
Formalisme 97
F. Rotella Commande des syst`emes par platitude
'
&
$
%
5 Crit`eres de platitude
1. Introduction 5. Crit`eres de platitude
2. Denitions et consequences 6. Cas des syst`emes lineaires
3. Exemples pratiques 7. SPD
4. Un peu de formalisme 8. Conclusion
Crit`eres de platitude 98
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Caracterisation de la platitude
il existe des conditions necessaires et susantes de platitude :
mais, caracterisation systematique (encore) dicile;
certains resultats partiels :
conditions necessaires;
conditions susantes;
cas particuliers,
permettent de repondre (assez souvent) ` a cette question;
ne pas oublier que la sortie plate a souvent une interpretation
physique.
Crit`eres de platitude 99
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Par decomposition en serie
Soit le syst`eme forme de :
u(t) z(t)
v(t)
y(t)
1
- - -
si
1
, plat de sortie plate y(t),
2
, plat de sortie plate z(t),
alors , plat de sortie plate z(t);
si
1
, plat de sortie plate y(t), , plat de sortie plate z(t), alors
2
, plat de sortie plate z(t);
si , plat de sortie plate z(t), alors
2
, plat de sortie plate z(t)
et
1
, plat de sortie plate y(t).
Exemple : Prise en compte des actionneurs.
Crit`eres de platitude 100
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Syst`emes sans dynamique des zeros
ou syst`emes linearisables entree-etat par bouclage statique
Preuve : ils sont caracterises par une forme normale :
pour i = 1 ` a m, y
(
i
)
i
= a
i
(x) +b
i
(x)u(t),
telle que
X
i
= n et :
rang
_
_
b
1
(x)
.
.
.
b
m
(x)
_
_
| {z }
B(x)
= m.
Le bouclage u = B(x)
1
(v A(x)) le transforme en :
pour i = 1 ` a m, y
(
i
)
i
= v
i
(t),
Crit`eres de platitude 101
F. Rotella Commande des syst`emes par platitude
'
&
$
%
dont la sortie plate est constituee par tous les y
i
appelees sorties de
Brunovski du syst`eme.
Comme il existe un dieomorphisme :
_
_
y
.
.
.
y
(1)
_
_
= (x),
on a x = (y, . . . , y
(1)
) donc u = (y, . . . , y
()
), ce qui clos la
demonstration.
Crit`eres de platitude 102
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Cas particuliers
1. Pour les syst`emes mono-entree, platitude et linearisation
concident.
2. Pour les syst`emes lineaires, comme la commandabilite est une
CNS dobtention de la forme de Brunovski :
platitude et commandabilite concident
Crit`eres de platitude 103
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Syst`emes anes en la commande de dimension n
Lorsque le nombre de commandes est n 1 :
platitude et commandabilite concident.
Soit le syst`eme :
x(t) = f
0
(x) +
n1
X
i=1
f
i
(x)u
i
(t),
pour construire sa sortie plate :
1. on elimine les commandes =
P
n
i=1
a
i
(x) x
i
= g(x);
2. puis :
si un des a
i
(x) est nul (e.g. a
r
) alors une sortie plate est
(x
1
, . . . , x
r1
, x
r+1
, . . . , x
n
);
si tous les a
i
(x) sont non nuls, on proc`ede ` a un changement
Crit`eres de platitude 104
F. Rotella Commande des syst`emes par platitude
'
&
$
%
de variable :
z = (x
1
, x
2
, . . . , x
n
) x
1
= (z, x
2
, . . . , x
n
),
et on ecrit g(x) :
g(x) = a
1
(x)
"
z
z +
n
X
i=2
x
i
x
i
#
+
n
X
i=2
a
i
(x) x
i
,
= a
1
(x)
z
z +
n
X
i=2
"
a
i
(x) +a
1
(x)
n
X
i=2
x
i
#
x
i
.
Il sut de choisir tel que :
x
2
=
a
2
a
1
,
pour se ramener au cas precedent. Une sortie plate est alors
donnee par (z
1
, x
3
, . . . , x
n
).
Crit`eres de platitude 105
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Syst`emes sans derive `a 2 commandes
n etats, n 2 commandes : platitude = commandabilite :
si n est impair, il est 0-plat;
si n est pair, il est 1-plat;
n etats, 2 commandes :
x(t) = f
1
(x)u
1
(t) +f
2
(x)u
2
(t),
si on construit la suite de distributions :
0
= span{f
1
, f
2
}, pour k 1,
k+1
= span{
k
, [
k
,
k
]},
alors la platitude est equivalente ` a :
pour k = 0 ` a n 2, rang
k
= k + 2.
Exemple : le chariot `a remorque.
Crit`eres de platitude 106
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Critt`ere des varietes reglees
Crit`ere permettant de mettre en evidence la non platitude dun
syst`eme.
Soit le syst`eme de dimension n `a m commandes :
x(t) = f(x, u)
dont lelimination des commandes conduit ` a un syst`eme de n m
relations F(x, x) = 0.
Crit`ere : si le syst`eme est plat, alors :
v 6= 0, (, ), F(, ) = 0, a R, F(, +av) = 0.
Crit`eres de platitude 107
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Demonstration (esquisse)
soit une trajectoire particuli`ere x veriant F( x, x
(1)
) = 0;
si le syst`eme est plat alors x = A(z, . . . , z
()
) et :
F(A(z, . . . , z
()
),
X
i=0
A
z
(i)
z
(i+1)
) = 0;
soit z veriant x = A( z, . . . , z
()
) et z(t) telle que :
pour i = 0 ` a , z
(i)
= z
(i)
, et z
(+1)
= z
(+1)
+v;
alors :
F( x, x
(1)
+
A
z
()
z
v) = 0.
Crit`eres de platitude 108
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Exemple du pendule inverse
Soit le syst`eme constitue par un pendule inverse sur un chariot
dont la position horizontale est commandee :
(M +m) x +ml cos
ml sin
2
= f(t),
7
3
l
+ cos x g sin = 0.
La deuxi`eme relation fournit :
7
3
l(
2
+a
2
) + cos (
1
+a
1
) g sin = 0,
7
3
l
2
+ cos
1
g sin
| {z }
0
+a(
7
3
l
2
+ cos
1
) = 0,
Necessairement, on doit avoir :
1
= 0 donc
2
= 0.
Crit`eres de platitude 109
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Pendule inverse linearise
Linearisation du pendule inverse autour de (t) = 0 :
(M +m) x +ml
= f(t),
7
3
l
+ x g = 0.
La deuxi`eme relation fournit :
7
3
l
2
+
1
g
| {z }
0
+a(
7
3
l
2
+
1
) = 0,
et la relation
1
=
7
3
l
2
, permet de montrer que le linearise du
pendule est potentiellement plat (il reste `a le montrer!)
Crit`eres de platitude 110
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Platitude du pendule linearise
evident : soit =
7
3
l +x, alors
(t) = (t) =(t) =x(t) =f(t);
equation detat avec X =
h
x x
i
T
et k =
3
(7M+4m)l
:
X =
_
_
0 1 0 0
0 0 mkgl 0
0 0 0 1
0 0 k(M +m) 0
_
_
X +
_
_
0
7kl
3
0
k
_
_
f(t),
commandable donc plat.
Crit`eres de platitude 111
F. Rotella Commande des syst`emes par platitude
'
&
$
%
CNS de platitude
Aranda-Bricaire, Moog, Pom et, 1995 : calcul de la base dun
module cotangent (forme innitesimale de Brunovski) et
conditions dintegrabilites;
Pereira da Silva, 2000 : expression des conditions sur une
fonction candidate et elimination de variables;
Chetverikov, 2001 : amelioration du premier par methode de
perturbation;
Levine, 2004 : simplication des conditions par utilisation des
jets innis et de la forme implicite.
Mais les conditions sont ralativement lourdes ` a mettre en uvre
(utilisation du calcul formel)
Crit`eres de platitude 112
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Platitude et linearisation
Il est legitime de se poser la question de la relation entre la
platitude dun mod`ele non lineaire et la platitude du mod`ele
linearise.
Il y a lieu de distinguer :
linearisation autour dun point de fonctionnement;
linearisation autour dune trajectoire.
Crit`eres de platitude 113
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Linearisation autour dun point
La platitude ne se conserve pas.
Exemples
1. le pendule inverse sur le chariot : non lineaire non plat et
linearise autour de 0 plat.
2. le robot unicycle :
x = cos u,
y = sinu, (6)
= v,
est plat (syst`eme chane), mais le linearise autour de = 0, non.
Crit`eres de platitude 114
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Linearisation autour dune trajectoire
La situation est compl`etement dierente et la sortie plate du
linearise peut donner une idee de la sortie plate du syst`eme non
lineaire.
Exemple : le robot unicycle.
trajectoire : T
d
= (x
d
(t), y
d
(t),
d
(t), u
d
(t), v
d
(t)) veriant (6);
linearise autour de T
d
:
x = u
d
sin
d
+ cos
d
u,
y = u
d
cos
d
+ sin
d
u,
= v.
trivial : (x, y) est une sortie plate de ce syst`eme;
comparer ` a la linearisation de la sortie plate (x, y) du mod`ele
non lineaire!
Crit`eres de platitude 115
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Conjecture
La sortie plate du syst`eme linearise
est obtenue
par linearisation de la sortie plate du syst`eme non lineaire.
la preuve de ce resultat est un probl`eme ouvert;
permet par integration de retrouver (parfois) la sortie plate du
syst`eme non lineaire.
Crit`eres de platitude 116
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Resultats de Levine (2004)
utilisation la forme implicite F(x, x) = 0;
syst`eme plat si et seulement si linearise tangent non
stationnaire est plat;
construction eective des sorties plates par :
decompositions de Smith en non stationnaire;
integrations de formes dierentielles exterieures;
algorithme en calcul formel.
Crit`eres de platitude 117
F. Rotella Commande des syst`emes par platitude
'
&
$
%
6 Application aux syst`emes lineaires
1. Introduction 5. Crit`eres de platitude
2. Denitions et consequences 6. Cas des syst`emes lineaires
3. Exemples pratiques 7. SPD
4. Un peu de formalisme 8. Conclusion
Application aux syst`emes lineaires 118
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Cas des syst`emes mono-entree
Soit le syst`eme lineaire :
A(p)y(t) = B(p)u(t),
o` u A(p) et B(p) sont premiers entre eux :
A(p) = p
n
+
n1
X
i=0
a
i
p
i
= p
n
+A
(p),
B(p) =
n1
X
i=0
b
i
p
i
.
Etat partiel (Kailath, 1980) : z(t) tel que :
A(p)z(t) = u(t),
B(p)z(t) = y(t).
Application aux syst`emes lineaires 119
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Letat partiel est une sortie plate
Existe-t-il N(p) et D(p) tels que :
z(t) = N(p)y(t) +D(p)u(t)?
Il faut quils soient solutions de lequation de Bezout :
N(p)B(p) +D(p)A(p) = 1. (7)
Ainsi : platitude et (commandabilite-observabilite) concident et
z(t) est une sortie plate du syst`eme.
Remarque : y(t) est une sortie plate si et seulement si B(p) = cte.
Application aux syst`emes lineaires 120
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Commande par platitude
Suivant la methode precedente, la commande :
u(t) = v(t) +A
(p)z(t),
o` u :
v(t) = z
(n)
d
(t) +
n1
X
i=0
k
i
(z
(i)
d
(t) z
(i)
(t)),
assure la poursuite asymptotique de la trajectoire z
d
(t).
Que se passe-t-il si on utilise la denition de la sortie plate?
Application aux syst`emes lineaires 121
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Commande par platitude = commande RST
Posons : K(p) = p
n
+
P
n1
i=0
k
i
p
i
= p
n
+K
(p), alors :
u(t) = K(p)z
d
(t) + [A
(p) K
(p)] z(t).
mais z(t) = N(p)y(t) +D(p)u(t), soit :
u(t) = K(p)z
d
(t) + [A
(p) K
(p)] [N(p)y(t) +D(p)u(t)] ,
ce qui donne une commande RST :
R(p)u(t) = K(p)z
d
(t) S(p)y(t).
Application aux syst`emes lineaires 122
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Remarques
R(p) = 1 [A
(p) K
(p)] D(p),
S(p) = [A
(p) K
(p)] N(p).
1. Dynamique de regulation P(p) = A(p)R(p) +B(p)S(p) :
A(p)R(p) +B(p)S(p)
= A(p) [1 [A
(p) K
(p)] D(p)] B(p) [A
(p) K
(p)] N(p),
= A(p) + [K
(p) A
(p)] [N(p)B(p) +D(p)A(p)] ,
= K(p).
2. Il nest pas concu `a partir dun mod`ele de comportement
(B
m
(p)/A
m
(p)) mais `a partir dune trajectoire `a suivre
K(p)z
d
(t).
Application aux syst`emes lineaires 123
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Mais...
Une commande RST ne peut etre mise en uvre que si :
degre S > degre R.
Or :
deg (1 [A
] D) = deg ([A
] N) 1,
soit ici :
degre S < degre R.
Conclusion : cette commande nest pas realisable!
Que faire?
Application aux syst`emes lineaires 124
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Realisation de la commande par platitude
Comme u(t) = A(p)z(t), y(t) = B(p)z(t) : observation de
Z =
h
z(t) z(t) . . . z
(n1)
(t)
i
T
, regi par :
Z = AZ +bu,
y = cZ,
o` u :
A =
_
_
1
.
.
.
1
a
0
a
1
a
n1
_
_
, b =
_
_
0
.
.
.
0
1
_
_
,
c =
h
b
0
b
1
b
n1
i
.
Application aux syst`emes lineaires 125
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Premi`ere possibilite
Utilisation dun observateur de Luenberger :
.
Z = (Ac)
Z +bu +y,
o` u F = Ac est de Hurwitz.
Avec a =
h
a
0
a
1
a
n1
i
et k =
h
k
0
k
1
k
n1
i
,
la commande secrit :
u(t) = K(p)z
d
(t) + (a k)(pI F)
1
(bu +y).
Inconvenient : choix des p oles de lobservateur.
Application aux syst`emes lineaires 126
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Deuxi`eme possibilite
Par derivations successives :
_
_
y
y
.
.
.
y
(n1)
_
_
= O
(A,c)
Z +M
(A,b,c)
_
_
u
u
.
.
.
u
(n2)
_
_
,
Application aux syst`emes lineaires 127
F. Rotella Commande des syst`emes par platitude
'
&
$
%
o` u :
O
(A,c)
=
_
_
c
cA
.
.
.
cA
n1
_
_
, M
(A,b,c)
=
_
_
0 0
cb
.
.
.
.
.
.
cAb cb
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
0
cA
n2
b cAb cb
_
_
.
Comme le syst`eme est observable :
Z = O
1
(A,c)
_
_
_
_
y
y
.
.
.
y
(n1)
_
_
M
(A,b,c)
_
_
u
u
.
.
.
u
(n2)
_
_
_
_
. (8)
Application aux syst`emes lineaires 128
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Soit x() = 0 et p
1
loperateur dintegration :
p
1
x(t) =
Z
t
x()d,
Z = AZ +bu est operationnellement equivalent ` a :
Z = Ap
1
Z +bp
1
u,
et en reiterant :
N, Z = A
Z +
X
i=1
A
i1
bp
i
u,
En particulier pour = n 1 :
Z = A
n1
p
(n1)
Z +
n1
X
i=1
A
i1
bp
i
u.
Application aux syst`emes lineaires 129
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Observateur exact
Finalement :
Z = A
n1
O
1
(A,c)
p
(n1)
_
_
y
y
.
.
.
y
(n1)
_
_
A
n1
O
1
(A,c)
M
(A,b,c)
p
(n1)
_
_
u
u
.
.
.
u
(n2)
_
_
+
n1
X
i=1
A
i1
bp
i
u.
Application aux syst`emes lineaires 130
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Remarques
(8) permet (en passant) dobtenir la solution de lequation de
Bezout (7) :
N(p) =
h
1 0 0
i
O
1
(A,c)
diag
1, p, . . . , p
n1
,
D(p) =
h
1 0 0
i
O
1
(A,c)
M
(A,b,c)
diag
1, p, . . . , p
n2
,
la version discr`ete est lobservateur ` a reponse pile :
cf. Astrom, Wittenmark, Computer controlled systems,
Prentice Hall, 1990.
Application aux syst`emes lineaires 131
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Commande par platitude et observateur exact
Forme compl`ete de la commande :
u(t) = K(p)z
d
(t) + [a k] Z,
= K(p)z
d
(t) S
(p
1
)y(t) Q
(p
1
)u(t),
Application aux syst`emes lineaires 132
F. Rotella Commande des syst`emes par platitude
'
&
$
%
S
(p
1
) = [k a] A
n1
O
1
(A,c)
_
_
p
(n1)
p
(n2)
.
.
.
p
1
1
_
_
,
Q
(p
1
) = [a k]
_
_
_
A
n1
O
1
(A,c)
M
(A,b,c)
h
A
n2
b b
i
_
_
_
_
_
p
(n1)
p
(n2)
.
.
.
p
1
_
_
.
Avec R
(p
1
) = 1 +Q
(p
1
), on obtient la forme RST realisable :
R
(p
1
)u(t) = K(p)z
d
(t) S
(p
1
)y(t).
Application aux syst`emes lineaires 133
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Exemple
Soit le deuxi`eme ordre avec A(p) = p
2
+a
1
p +a
0
et
B(p) = b
1
p +b
0
, qui correspond `a :
N(p) =
b
1
p +
b
0
a
1
b
1
, D(p) =
b
2
1
,
avec = b
2
0
a
1
b
0
b
1
+a
0
b
2
1
6= 0.
Sortie plate : z(t) = u(t) py(t);
Commande :
u(t) = K(p)z
d
(t) + [(a
1
k
1
)p + (a
0
k
0
)] z(t),
o` u K(p) = p
2
+k
1
p +k
0
denit la dynamique de lerreur de
poursuite.
Application aux syst`emes lineaires 134
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Realisation de u(t) =
p
2
+a
1
p +a
0
z(t) et y(t) = [b
1
p +b
0
] z(t) :
Z(t) =
_
_
0 1
a
0
a
1
_
_
Z(t) +
_
_
0
1
_
_
u(t),
y(t) =
h
b
0
b
1
i
Z(t),
soit :
O
(A,c)
=
_
_
b
0
b
1
a
0
b
1
b
0
a
1
b
1
_
_
, M
(A,b,c)
=
_
_
0
b
1
_
_
.
Donc :
Z(t) =
1
_
_
(b
0
a
1
b
1
) y(t) b
1
y(t) +b
2
1
u(t)
a
0
b
1
y(t) +b
0
y(t) b
0
b
1
u(t)
_
_
,
Dautre part :
Application aux syst`emes lineaires 135
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Z(t) =
_
_
0 1
a
0
a
1
_
_
p
1
Z(t) +
_
_
0
1
_
_
p
1
u(t),
=
1
_
_
a
0
b
1
p
1
y(t) +b
0
y(t) b
0
b
1
p
1
u(t)
(a
0
b
1
a
1
b
0
) y(t) a
0
b
0
p
1
y(t) +b
2
0
p
1
u(t)
_
_
.
Ce qui donne la forme RST realisable avec :
R
(p
1
) = 1 +
1
(k
1
a
1
)b
2
0
b
0
b
1
(k
0
a
0
)
p
1
,
S
(p
1
) =
1
([(k
1
a
1
) (a
0
b
1
a
1
b
0
) +b
0
(k
0
a
0
)]
+[a
0
b
1
(k
0
a
0
) (k
1
a
1
)b
0
a
0
] p
1
).
Remarque : Avec A
(p
1
) = p
2
A(p) et B
(p
1
) = p
2
B(p) :
A
(p
1
)R
(p
1
)+B
(p
1
)S
(p
1
) = 1+k
1
p
1
+k
0
p
2
= p
2
K(p).
Application aux syst`emes lineaires 136
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Extension par formalisme detat
Probl`eme : extension aux syst`emes multi-entrees ou aux syst`emes
non stationnaires.
Solution :
Equations detat.
platitude commandabilite;
utilisation de la forme canonique commandable;
determination systematique dune sortie plate
extension triviale aux syst`emes non stationnaires;
le RST ` a mettre en place sera deni sans ambigute.
Application aux syst`emes lineaires 137
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Exemple de loscillateur
-
-
L
L
L
L
LLs
x
u
Equation : x(t) =
2
(u(t) x(t)), avec ici
2
= 1;
Sortie plate : x(t)
u(t) = x(t) +
x(t)
2
.
Application aux syst`emes lineaires 138
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Commande de loscillateur
Generation de trajectoire, de t = 0 ` a 1 telle que x
d
(0) = 0,
x
d
(1) = 1, x
d
(0) = x
d
(1) = x
d
(0) = x
d
(1) = 0 :
x
d
(t) = 6t
5
15t
4
+ 10t
3
;
Commande `a poles de poursuite en (-10,-10) soit un t
r,5%
' 0.5 s. :
u(t) = x(t) + x
d
(t) + 20( x
d
(t) x(t)) + 100(x
d
(t) x(t)),
= x
d
(t) + 20 x
d
(t) + 100x
d
(t)
| {z }
d
(t)=600t
5
900t
4
80t
3
+420t
2
+60t
[20 x(t) + 99x(t)]
| {z }
bouclage detat
.
Application aux syst`emes lineaires 139
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Exemple de loscillateur double
-
-
L
L
L
L
LLs
u
-
x
2
x
1
u
Equations, avec
2
1
6=
2
2
(sinon non commandable) :
x
1
(t) =
2
1
(u(t) x
1
(t)),
x
2
(t) =
2
2
(u(t) x
2
(t)),
Application aux syst`emes lineaires 140
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Sortie plate de loscillateur double
Lelimination de la commande :
x
1
(t) +
x
1
(t)
2
1
= x
2
(t) +
x
2
(t)
2
2
,
m
x
1
(t)
2
1
x
2
(t)
2
2
= x
2
(t) x
1
(t).
Sortie plate :
z(t) =
x
1
(t)
2
1
x
2
(t)
2
2
.
Application aux syst`emes lineaires 141
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Parametrisation de loscillateur double
Etats :
_
_
x
1
(t)
x
2
(t)
_
_
=
1
2
2
2
1
_
_
2
1
1
2
2
1
_
_
_
_
z(t)
2
1
2
2
z(t)
_
_
,
=
1
2
2
2
1
_
_
2
1
( z(t) +
2
2
z(t))
2
2
( z(t) +
2
1
z(t))
_
_
.
Commande :
u(t) =
1
2
2
2
1
(
2
1
2
2
z(t) + (
2
1
+
2
2
) z(t) +z
(4)
(t)).
Application aux syst`emes lineaires 142
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Commande de loscillateur double
Generation de trajectoire : z
d
(t)
Bouclage :
u(t) =
1
2
2
2
1
(
2
1
2
2
z + (
2
1
+
2
2
) z +z
(4)
d
+
3
X
i=0
k
i
(z
(i)
d
z
(i)
),
=
d
(t)
k
3
z
(3)
+ (k
2
2
1
2
2
)z
(2)
+k
1
z
(1)
+ (k
0
2
1
2
2
)z
.
Rappel : le polynome p
4
+
3
X
i=0
k
i
p
i
xe les dynamiques de la
poursuite de trajectoire.
Application aux syst`emes lineaires 143
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Exemple de loscillateur multiple
-
-
L
L
L
L
LLs
t
-
x
n
x
1
u
D
D
D
D D
u
Equations, avec
2
i
6=
2
j
pour i 6= j (sinon non commandable) :
pour i = 1 ` a n, x
i
(t) =
2
i
(u(t) x
i
(t)).
Lelimination des commandes conduit aux relations :
x
1
(t) +
x
1
(t)
2
1
= = x
n
(t) +
x
n
(t)
2
2
,
Application aux syst`emes lineaires 144
F. Rotella Commande des syst`emes par platitude
'
&
$
%
`a partir desquelles il nest pas evident de detecter une sortie plate!
Application aux syst`emes lineaires 145
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Equation detat de loscillateur multiple
X(t) =
_
_
.
.
.
2
i
.
.
.
_
_
X(t) +
_
_
.
.
.
2
i
.
.
.
_
_
u(t).
Matrice de commandabilite :
C =
_
_
.
.
.
.
.
.
.
.
.
2
i
4
i
(1)
n
2n
i
.
.
.
.
.
.
.
.
.
_
_
,
Transfert entree-etat :
(pI A)
1
B =
h
2
i
p+
2
i
i
T
.
Application aux syst`emes lineaires 146
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Recherche dune sortie plate
Rappel : la sortie plate dun syst`eme mono-entree correspond `a un
transfert entree-sortie plate o` u le numerateur est une constante.
Il sut de chercher C =
h
c
1
c
n
i
tel que :
n
X
i=1
c
i
2
i
p +
2
i
=
n
Y
i=1
c
i
2
i
n
Y
i=1
p +
2
i
,
alors une sortie plate sera donnee par :
z(t) = CX(t).
Application aux syst`emes lineaires 147
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Cela revient `a une decomposition en elements simples :
1
n
Y
i=1
p +
2
i
=
n
X
i=1
r
i
p +
2
i
, avec r
i
=
1
n
Y
j=1,j6=i
(
2
j
2
i
)
.
Donc :
c
i
=
1
2
i
n
Y
j=1,j6=i
(
2
j
2
i
)
Sortie plate :
z(t) =
n
X
i=1
x
i
(t)
2
i
n
Y
j=1,j6=i
(
2
j
2
i
)
.
Mais : demarche dicilement generalisable au cas multi-entrees.
Application aux syst`emes lineaires 148
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Formalisme detat
Soit le syst`eme lineaire :
X(t) = AX(t) +Bu(t),
suppose commandable.
Il existe un changement de variables :
x
C
(t) = T
C
X(t),
(algorithme de Luenberger, cf. cours de syst`emes multi-entrees) tel
que :
x
C
= A
C
x
C
+B
C
H
C
u
|{z}
u
c
,
Application aux syst`emes lineaires 149
F. Rotella Commande des syst`emes par platitude
'
&
$
%
avec (pour m = 3 ici) A
C
= T
C
AT
1
C
=
_
_
1
.
.
.
1
1
.
.
.
1
1
.
.
.
1
_
_
,
Application aux syst`emes lineaires 150
F. Rotella Commande des syst`emes par platitude
'
&
$
%
B
C
= T
C
B =
_
_
1 0 0
0 1 0
0 0 1
_
_
, H
C
=
_
_
1
0 1
0 1
_
_
.
Application aux syst`emes lineaires 151
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Sortie plate
x
C
(t) =
h
x
1T
C
(t) x
2T
C
(t) . . . x
mT
C
(t)
i
T
o` u chaque x
i
C
(t) est un
vecteur de dimension
i
, i-i`eme indice de commandabilite.
Soit z
i
la premi`ere composante de x
i
C
(t) alors :
z(t) =
_
_
z
1
(t)
z
2
(t)
.
.
.
z
m
(t)
_
_
est une sortie plate.
Les z
2
(t) sappellent les sorties de Brunovski du syst`eme.
Application aux syst`emes lineaires 152
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Preuve de la platitude
Dapr`es la forme canonique commandable :
u
C,i
= z
(
i
)
i
(t) +
m
X
j=1
j
1
X
k=0
a
i,j,k
z
(k)
j
(t)
!
, et u(t) = H
1
C
u
C
(t).
Remarque :
X(t) = T
1
C
x
C
(t) =
1
X
k=0
M
k
z
(k)
(t),
u(t) =
X
k=0
N
k
z
(k)
(t),
o` u = max
i
i
est lindex de commandabilite.
Remarque : N
nest egal `a H
1
C
que si tous les
i
sont egaux.
Application aux syst`emes lineaires 153
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Resolution du decouplage
Il sut de poser le bouclage :
u
C,i
(t) = v
i
(t)
m
X
j=1
A
i,j
x
j
C
(t),
pour obtenir le syst`eme decouple :
pour i = 1 ` a m, z
(
i
)
i
(t) = v
i
(t)
Le retour decouplant secrit nalement :
u(t) = H
1
C
v(t) H
1
C
h
A
1
A
2
A
m
i
T
C
x(t).
Application aux syst`emes lineaires 154
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Retour stabilisant
pour i = 1 ` a m,
v
i
(t) = z
(
i
)
d,i
(t) +
j
1
X
k=0
i,k
z
(k)
d,i
(t) z
(k)
j
(t)
,
= K
i
(p)z
d,i
(t) K
i
x
i
C
(t).
Soit globalement :
u(t) =
d
(t) H
1
C
n
diag {K
i
} +
h
A
1
A
2
A
m
io
T
C
| {z }
gain de retour detat : K
x(t).
Application aux syst`emes lineaires 155
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Syst`emes non stationnaires
Soit le syst`eme lineaire :
X(t) = A(t)X(t) +B(t)u(t),
Crit`ere de commandabilite (Silverman, Meadows) :
operateur dierentiel : C
0
(M(t)) = M(t), et pour tout i > 1 :
C
i+1
(M(t)) = A(t)C
i
(M(t))
C
i
(M(t));
test de commandabilite sur un intervalle de temps T = [t
1
, t
2
] :
si il existe un entier tel que la matrice :
C
{}
(t) =
h
C
0
(B(t)) C
1
(B(t)) C
1
(B(t))
i
,
soit de rang n, sur T alors le syst`eme est commandable sur T.
Application aux syst`emes lineaires 156
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Forme commandable non stationnaires
Syst`eme commandable = il existe un changement de variables :
x
C
(t) = T
C
(t)X(t),
(algorithme de Seal-Stubberud) tel que :
x
C
= A
C
(t)x
C
+B
C
(t)H
C
(t)u
| {z }
u
c
,
o` u :
A
C
(t) = T
C
(t)A(t)T
1
C
(t) +
T
C
(t)T
1
C
(t)
et A
C
(t), B
C
(t), H
C
(t) ont la meme structure quen stationnaire
mais o` u les dependent de t.
Application aux syst`emes lineaires 157
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Commande par platitude en non stationnaires
soit z
i
la premi`ere composante de x
i
C
(t) alors :
z(t) =
_
_
z
1
(t)
z
2
(t)
.
.
.
z
m
(t)
_
_
est une sortie plate;
commande decouplante avec poursuite asymptotique :
u(t) =
d
(t)
H
1
C
n
diag {K
i
} +
h
A
1
A
m
io
T
C
| {z }
gain de retour detat : K(t)
x(t).
Application aux syst`emes lineaires 158
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Exemple du moteur
Moteur `a courant continu `a excitation separee dont le ux
statorique (t) varie au cours du temps :
L
dI(t)
dt
+RI(t) = V (t) K
e
(t)(t),
J
d(t)
dt
+f(t) = K
m
(t)I(t),
o` u :
(t) : le ux induit par le stator;
I(t) : courant rotorique;
V (t) : tension rotorique (commande);
(t) : vitesse de rotation du rotor (sortie).
Application aux syst`emes lineaires 159
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Forme canonique commandable
Matrice de commandabilite :
C
{2}
(t) =
_
_
1
L
R
L
0
K
m
(t)
JL
_
_
,
t, commandable (t) est toujours non nul et borne;
Forme commandable :
Z(t) =
_
_
0 1
0
(t)
1
(t)
_
_
Z(t) +
_
_
0
1
_
_
V (t),
J(t) =
h
K
m
L(t) 0
i
Z(t),
0
(t) =
2
+
K
m
K
e
JL
2
+
Rf
JL
+
R
J
,
1
(t) =
+
f
J
+
R
L
.
Application aux syst`emes lineaires 160
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Platitude
Sortie plate : z(t), premi`ere composante du vecteur Z(t).
Commande par platitude : trajectoire desiree z
d
(t) et :
V (t) = z
d
+k
1
z
d
.
z
+k
0
z
d
z
+
1
.
z +
0
z,
o` u
.
z(t) et z(t) sont les valeurs observees de la sortie plate et sa
derivee.
Utilisation de la forme observable
Application aux syst`emes lineaires 161
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Formes dierentielles entree-sortie
Par elimination du courant :
f
J
+
R
L
!
+
K
m
K
e
2
JL
f
J
+
Rf
LJ
!
=
K
m
JL
V.
transformable en :
+
_
f
J
+
R
L
!
| {z }
1
(t)
_
(1)
+
K
m
K
e
JL
f
J
+
Rf
LJ
+
2
!
| {z }
0
(t)
=
K
m
JL
V.
Application aux syst`emes lineaires 162
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Forme canonique observable
Pour les syst`emes mono-entree mono-sortie, realisation de la 2
`eme
forme dierentielle entree-sortie conduit `a la forme observable :
X(t) =
_
_
0
0
(t)
1
1
(t)
_
_
X(t) +
_
_
(t)
0
_
_
V
r
(t)
(t) =
0 1
X(t)
Application aux syst`emes lineaires 163
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Observateur reduit
On a :
x
1
(t) =
0
(t)(t) +(t)V, et x
1
(t) =
(t) +
1
(t)(t)
Observateur naf :
.
x
1
(t) =
0
(t)(t) +(t)V +L(t)
(t) +
1
(t)(t) x
1
(t)
Pour eliminer la derivee de la sortie, posons (t) = x
1
(t) L(t)y(t) :
(t) = L(t)(t)+(t)V +
0
(t) +
1
(t)L(t) L
2
(t)
L(t)
(t)
Remarque : L(t) peut etre pris egal `a une constante positive .
Application aux syst`emes lineaires 164
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Observateur reduit (2)
Avec L(t) = :
(t) = (t) +(t)V
r
(t) +
0
(t) +
1
(t)
2
(t).
Estimation de x
1
:
x
1
(t) = (t) +L(t)y(t)
et de
Z(t) par :
Z(t) =
1
K
m
(t)
_
_
0 JL
JL (fL +RJ)
_
_
X(t).
Application aux syst`emes lineaires 165
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Generation de trajectoire
Trajectoire plate desiree : z
d
(t) =
_
_
0.1 si t t
0
z
d
(t
0
) +
21
5
35
6
+ 15
7
z
d
(t
f
) z
d
(t
0
)
si t
0
t t
f
0.2 si t t
f
avec :
=
t t
0
t
f
t
0
.
Choix des p oles :
poursuite : 4.20 + 4.28i et 4.20 4.28i;
observateur : 5.
Application aux syst`emes lineaires 166
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Simulation
Ici, t
0
= 2 sec et t
f
= 3 sec .
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
0
0.05
0.1
0.15
0.2
0.25
time in s
f
l
a
t
o
u
t
p
u
t
z
d
(t) et z(t)
Application aux syst`emes lineaires 167
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Simulation
Mais . . .
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
0
0.5
1
1.5
2
2.5
time in s
o
u
t
p
u
t
i
n
r
d
/
s
d
(t) et (t)
Application aux syst`emes lineaires 168
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Poursuite de vitesse
Il sut dinverser la relation sans dynamique liant (t) et z(t) :
z
d
(t) =
J
K
m
L(t)
d
(t).
o` u
d
(t) est le prol de vitesse desire. Par exemple pour une
vitesse angulaire constante desiree
d
(t) =
d
:
z
d
(t) =
J
d
(t)
K
m
L
2
(t)
, z
d
(t) =
J
d
(2
2
(t) (t)
(t))
K
m
L
3
(t)
.
Comme
X(t) =
h
(t) +(t) (t)
i
T
, et
Z(t) = P(t)
X(t), on
obtient le regulateur-observateur generant la commande sous la
forme :
V (t) = (p
2
+k
1
p +k
0
)
J
K
m
L
r
h
k
0
0
k
1
1
i
P
X.
Application aux syst`emes lineaires 169
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Resultats experimentaux
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
0.85
0.9
0.95
1
1.05
1.1
1.15
1.2
temps en s
f
lu
x
m
e
s
u
r
e
n
W
b
Mesure du ux induit.
Application aux syst`emes lineaires 170
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Resultats experimentaux
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
0.2
0
0.2
0.4
0.6
0.8
1
1.2
temps en s
v
i
t
e
s
s
e
e
n
r
d
/
s
Vitesse de rotation du rotor.
Application aux syst`emes lineaires 171
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Test de robustesse
Meme commande sur un moteur presentant des ecarts de -20%
pour le param`etre J et -50% pour le param`etre L
r
.
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
0.2
0
0.2
0.4
0.6
0.8
1
1.2
temps en s
v
it
e
s
s
e
e
n
r
d
/
s
Eet dune erreur sur les param`etres.
Application aux syst`emes lineaires 172
F. Rotella Commande des syst`emes par platitude
'
&
$
%
7 Syst`emes `a param`etres distribues
1. Introduction 5. Crit`eres de platitude
2. Denitions et consequences 6. Cas des syst`emes lineaires
3. Exemples pratiques 7. SPD
4. Un peu de formalisme 8. Conclusion
Syst`emes ` a param`etres distribues 173
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Reacteur tubulaire
-
y(t) = c(0, t)
c
z
(0, t) = 0 c(z, t)
u(t) = c(L, t)
L 0
z
variables :
c(z, t) : concentration du reactant,
u(t) : commande fronti`ere amont,
y(t) : sortie fronti`ere aval,
Syst`emes ` a param`etres distribues 174
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Reacteur tubulaire : modelisation
Modelisation :
c(z, t)
t
=
2
c(z, t)
z
2
c(z, t)
z
rc(z, t),
Conditions limites : c(L, t) = u(t),
c(0, t)
z
= 0,
Conditions initiales : c(z, 0) = 0,
Sortie : y(t) = c(0, t).
coecients signicatifs :
> 0 : dispersion axiale,
0 : vitesse interstitielle du reactant,
r : taux de reaction (cinetique de la reaction).
Syst`emes ` a param`etres distribues 175
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Reacteur tubulaire : simplication
x(z, t) = exp
r +
2
4
t
2
z
c(z, t),
=equation de diusion :
x(z, t)
t
=
2
x(z, t)
z
2
Conditions limites : x(L, t) = exp
L
2
r +
2
4
u(t),
x(0, t)
z
=
2
x(0, t),
Conditions initiales : x(z, 0) = 0,
Sortie :
y(t) = exp
r +
2
4
x(0, t).
Syst`emes ` a param`etres distribues 176
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Reacteur tubulaire : platitude
Par resolution analytique :
x(z, t) =
X
i0
a
i
(t)
z
i
i!
.
Soit x(0, t) = (t), alors, pour k 0 :
_
_
a
2k
(t) =
1
(k)
(t),
a
2k+1
(t) =
2
k+1
(k)
(t),
soit :
x(z, t) =
X
k0
1
2(2k + 1)
z
z
2k
(2k)!
k
(k)
(t).
Syst`emes ` a param`etres distribues 177
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Dautre part :
u(t) = exp
r +
2
4
t
L
2
x(L, t),
= exp
r +
2
4
t
L
2
X
k0
1
L
2(2k + 1)
L
2k
(2k)!
k
(k)
(t),
indique que (t) permet dexprimer toutes les variables x(z, t),
z [0, L] et u(t).
Syst`emes ` a param`etres distribues 178
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Remarques
1. Si on cherche (t) en fonction des autres variables :
la relation dendogemete nest pas satisfaite MAIS on
consid`ere quand meme (t) comme sortie plate du syst`eme.
2. Comme :
(t) = exp
r +
2
4
y(t),
y(t) est sortie plate de ce syst`eme.
3. La trajectoire desiree y
d
(t) doit etre inniment derivable :
polyn omes;
fonctions Gevrey : fonctions dont une serie des derivees
iterees converge.
4. Commande boucle ouverte :
y
d
(t) =
d
(t) =x
d
(L, t) =u
d
(t).
Syst`emes ` a param`etres distribues 179
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Fonctions Gevrey
Necessaires ` a utiliser pour eviter les probl`emes aux extremites.
Denition : f(t) de [0, T] dans R est de Gevrey dordre si :
(m, ), t [0, T], k 0,
f
(k)
(t)
m
(k!)
k
.
Exemple : fonction de Gevrey dordre d > 1,
f(t) =
_
_
0 pour t 0,
R
t/T
0
exp
d
(1 )
d
d
R
1
0
exp
d
(1 )
d
d
pour 0 t T,
1 pour t T.
Syst`emes ` a param`etres distribues 180
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Commande du reacteur
generation de trajectoire : on prend pour y
d
(t) une fonction de
Gevrey dordre < 2;
en pratique, on tronque la serie `a un ordre arbitraire N;
on gen`ere une commande en boucle fermee comme en
dimension nie ` a partir de cette troncature.
Syst`emes ` a param`etres distribues 181
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Equation de la chaleur
Barre chauee ` a une extremite :
-
0
x
1
paroi isolante
mesure
source de
chaleur
(x, t)
Equation de la chaleur :
(x, t)
t
=
2
(x, t)
x
2
;
Conditions limites :
(0, t)
x
= 0, (x, 0) = 0;
Commande : u(t) = (1, t).
Syst`emes ` a param`etres distribues 182
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Resolution operationnelle
Avec p ,
d
dt
:
x
00
(z, t) = px(z, t),
soit :
(x, t) = cosh(
px)A(t) + sinh(
px)B(t).
Conditions limites =
(x, t) =
cosh(
px)
cosh(
p)
u(t).
Syst`emes ` a param`etres distribues 183
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Platitude
Soit la sortie y(t) = (0, t), alors :
(x, t) = cosh(
px)y(t),
et :
u(t) = cosh(
p)y(t).
Consequence : y(t) est une sortie plate de ce syst`eme.
Syst`emes ` a param`etres distribues 184
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Remarques
le caract`ere endog`ene de y(t) nest pas etabli;
on a retrouve la meme interpretation de la sortie plate ` a partir
du transfert en tant quetat partiel que dans le cas des
syst`emes lineaires de dimension nie;
comme :
cosh(
px) =
X
i0
x
2i
p
i
(2i)!
,
on a :
(x, t) =
X
i0
x
2i
y
(i)
(t)
(2i)!
et u(t) =
X
i0
y
(i)
(t)
(2i)!
,
et on obtient le meme resultat quavec lecriture en serie;
utilisation de fonctions de Gevrey.
Syst`emes ` a param`etres distribues 185
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Commande par troncature
Soit y
d
(t) sur [0, T] et la troncature :
U
N
(t) =
N1
X
i=0
y
(i)
(t)
(2i)!
+
y
(N)
(t)
(2N)!
.
Commande mise en uvre :
U
N
(t) =
N1
X
i=0
y
(i)
(t)
(2i)!
+
y
(N)
d
(t) +
X
N1
i=0
k
i
(y
(i)
d
(t) y
(i)
(t))
(2N)!
,
=
y
(N)
d
(t) +
X
N1
i=0
k
i
y
(i)
d
(t)
(2N)!
N1
X
i=0
k
i
(2i)!
(2N)!
1
y
(i)
(t)
(2i)!
.
o` u les k
i
assurent une poursuite asymptotique de la trajectoire.
Syst`emes ` a param`etres distribues 186
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Choix de la troncature
Pour choisir N on remarque que :
(y
(N)
d
(t) y
(N)
(t)) +
X
N1
i=0
k
i
(y
(i)
d
(t) y
(i)
(t))
(2N)!
=
X
iN+1
y
(i)
(t)
(2i)!
X
iN+1
y
(i)
d
(t)
(2i)!
.
Soit N tel que, sur [0, T] :
X
iN+1
y
(i)
d
(t)
(2i)!
xe,
alors, sur [0, T] :
|y
d
(t) y(t)|
(2N)!
k
0
.
Le choix de la precision desiree permet de xer N.
Syst`emes ` a param`etres distribues 187
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Restauration dun signal
-
6 6 6
-
0
x
x +dx l
Emission
Reception
i(x, t)
u(t) v(0, t) v(x, t) v(l, t)
i(l, t)
Rdx, Ldx
Cdx,
1
Gdx
Z
Syst`emes ` a param`etres distribues 188
F. Rotella Commande des syst`emes par platitude
'
&
$
%
8 Conclusion
(provisoire . . . )
1. Introduction 5. Crit`eres de platitude
2. Denitions et consequences 6. Cas des syst`emes lineaires
3. Exemples pratiques 7. SPD
4. Un peu de formalisme 8. Conclusion
Conclusion 189
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Syst`emes non plats
De nombreux exemples (bille sur rail, pendule de Kapista, double
pendule inverse, tracteur ` a deux remorques deportees, etc...)
indiquent quil existe des syst`emes non plats : une ou plusieurs des
variables fait defaut.
Exemple de syst`eme non plat :
x
1
= x
2
3
x
2
,
x
2
= x
3
,
x
3
= u.
En eet on peut obtenir u et x
3
`a partir de x
2
, mais on nobtient
que x
1
: x
1
fait defaut!
Lorsque le syst`eme considere nest pas plat, on dispose de
techniques pour appliquer les principes de la platitude.
Conclusion 190
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Commandes de syst`emes non plats
1. Commande ` a deux dynamiques ou commande haute frequence :
u(t) = u
0
(t) +u
1
(t) sin
t
,
on est conduit ` a un syst`eme moyen qui peut etre plat.
2. Approximation par un syst`eme plat en eliminant les termes qui
nuisent `a la platitude.
3. Immersion dans un syst`eme plat plus grand.
4. Approximation par un syst`eme bilineaire plat.
5. Utilisation du caract`ere liouvillien du syst`eme (cest ` a dire que
les variables en defaut peuvent etre denies par des
integrations ` a partir dune sortie plate).
Conclusion 191
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Principes generaux
Dans les quatres derniers cas le principe de la commande par
platitude consiste :
1. ` a generer une trajectoire desiree;
2. ` a lineariser le syst`eme non lineaire autour de cette trajectoire:
on obtient alors un syst`eme lineaire non stationnaire;
3. sil est commandable, il est plat;
4. construire un bouclage lineaire non stationnaire de poursuite
de trajectoire.
Deuxi`eme structure de commande!
Conclusion 192
F. Rotella Commande des syst`emes par platitude
'
&
$
%
Que reste-t-il `a faire?
simplier les algorithmes et diminuer la complexite;
integrer des contraintes de structure (robustesse ou rejet de
perturbations);
etendre aux autres syst`emes : SPD non lineaires, ` a retards,
fractionnaires;
etudier la commande numerique;
generer les trajectoires sous contraintes;
appliquer le concept de platitude ` a dautres probl`emes de
lAutomatique : identication, observation, diagnostic, . . .
Conclusion 193
S-ar putea să vă placă și
- TD Liaison-SchématisationDocument7 paginiTD Liaison-SchématisationBen Saber Rahiim100% (1)
- Asservissement Échantillonné PDFDocument79 paginiAsservissement Échantillonné PDFFabrice FotsoÎncă nu există evaluări
- LC 25-007Document7 paginiLC 25-007Simon Houde100% (1)
- Cours S7 EtatDocument70 paginiCours S7 EtatMoundherNasmlaheÎncă nu există evaluări
- Cours 2 AA M2 E3A 1516 LN2 PDFDocument59 paginiCours 2 AA M2 E3A 1516 LN2 PDFrubis tarekÎncă nu există evaluări
- Modélisation Des Systèmes Linéaires Avec MatlabDocument4 paginiModélisation Des Systèmes Linéaires Avec MatlabMustapha El MetouiÎncă nu există evaluări
- Automatique Linéaire Continue Exercices 02Document25 paginiAutomatique Linéaire Continue Exercices 02Ayoub BoussairiÎncă nu există evaluări
- TP 2Document4 paginiTP 2zakariaÎncă nu există evaluări
- Gangloff Robotique Slides 1 Chapitre 1Document44 paginiGangloff Robotique Slides 1 Chapitre 1Rachida Jaziri Ep MahouachiÎncă nu există evaluări
- Fac-T-LMD-M-Master Aautomatique Des SystèmesDocument29 paginiFac-T-LMD-M-Master Aautomatique Des SystèmesBentchikou MohÎncă nu există evaluări
- Chapitre 2 Géométrique ModifierDocument28 paginiChapitre 2 Géométrique Modifierali18abid100% (1)
- Matlab Corrige PDFDocument4 paginiMatlab Corrige PDFIvana KenfackÎncă nu există evaluări
- TP Auto MEEA 04 05 PDFDocument88 paginiTP Auto MEEA 04 05 PDFYassine RabhiÎncă nu există evaluări
- Robots MobileDocument30 paginiRobots MobileLarbi ElbakkaliÎncă nu există evaluări
- TD2 Corrigé (Rég GTE 1A)Document7 paginiTD2 Corrigé (Rég GTE 1A)mohamed creatorÎncă nu există evaluări
- Commande ElectriqueDocument37 paginiCommande ElectriqueAbdelbaki ElfahemÎncă nu există evaluări
- CharaDamya AricheKarimaDocument61 paginiCharaDamya AricheKarimamezianeÎncă nu există evaluări
- Automatique Avancée Commande Non-Linéaire P2: Techniques de Linéarisation ExacteDocument44 paginiAutomatique Avancée Commande Non-Linéaire P2: Techniques de Linéarisation ExacteMbaira LeilaÎncă nu există evaluări
- Devoir Surveillé D'automatique-Formation Agrégative en Génie MécaniqueDocument8 paginiDevoir Surveillé D'automatique-Formation Agrégative en Génie MécaniqueKhmira WafaÎncă nu există evaluări
- Resume Travaux These VM 2Document9 paginiResume Travaux These VM 2Vincent MorioÎncă nu există evaluări
- Exer Cori TP Info3 L2Document4 paginiExer Cori TP Info3 L2kheris salihaÎncă nu există evaluări
- Tpn02 DiagDocument7 paginiTpn02 DiagAhmed Mehdi DALI100% (1)
- Robotique Ch4 PDFDocument35 paginiRobotique Ch4 PDFDoaa RachdiÎncă nu există evaluări
- Filliat RobotiqueMobile ENSTAParisTechDocument175 paginiFilliat RobotiqueMobile ENSTAParisTechRazzougui SarahÎncă nu există evaluări
- Cours Automatique Linéaire Séance 1Document68 paginiCours Automatique Linéaire Séance 1Mohammed BenlamlihÎncă nu există evaluări
- Chapitre 2 - Modélisation de La Machine Asynchrone Et Synchrone - 2018 - 2019Document19 paginiChapitre 2 - Modélisation de La Machine Asynchrone Et Synchrone - 2018 - 2019Ali MEDJGHOUÎncă nu există evaluări
- Elec Benderradji Hadda PDFDocument132 paginiElec Benderradji Hadda PDFHattab AbdellilahÎncă nu există evaluări
- Cinématique Inverse D'un Robot Sériel Dédié Au Domaine MédicalDocument101 paginiCinématique Inverse D'un Robot Sériel Dédié Au Domaine MédicalChiheb MrabetÎncă nu există evaluări
- Commande Et Stabilite Des Systemes Lineaires Flous de Takagi-SugenoDocument6 paginiCommande Et Stabilite Des Systemes Lineaires Flous de Takagi-Sugenobadis hamhoum100% (1)
- FasciculeTD Chapitre1Document20 paginiFasciculeTD Chapitre1AlaEddineBelhajFrajÎncă nu există evaluări
- 5.3 Correction Des Systèmes AsservisDocument21 pagini5.3 Correction Des Systèmes AsservisKeubeng CriyosÎncă nu există evaluări
- TPautomatique TIMQ2018Document16 paginiTPautomatique TIMQ2018fatima azalmadÎncă nu există evaluări
- Robotique Cours PDFDocument93 paginiRobotique Cours PDFOussama Ben TanfousÎncă nu există evaluări
- Commande OptimaleDocument37 paginiCommande Optimalefarid saad100% (1)
- Kalman ArticleDocument13 paginiKalman Articlesouleymane_thiamÎncă nu există evaluări
- TP1 AutomatiqueDocument14 paginiTP1 AutomatiqueRamzi AyadiÎncă nu există evaluări
- KalmanDocument49 paginiKalmanLoulou DePanamÎncă nu există evaluări
- Support Cours Commande Numerique Master 10Document45 paginiSupport Cours Commande Numerique Master 10Lamjed AouaniÎncă nu există evaluări
- Tp2 Sabir TalbyDocument17 paginiTp2 Sabir TalbyKamal KamalÎncă nu există evaluări
- Recueil Exercices 075 PDFDocument45 paginiRecueil Exercices 075 PDFTheo WanÎncă nu există evaluări
- Cours Com Adaptative 15 16 PDFDocument64 paginiCours Com Adaptative 15 16 PDFfatmi zakariaÎncă nu există evaluări
- 3 - Commande Par Retour D - État. - ÉtudiantDocument10 pagini3 - Commande Par Retour D - État. - Étudiantzakariaoo zakariaÎncă nu există evaluări
- Automatique II 07 PDFDocument4 paginiAutomatique II 07 PDFmiraÎncă nu există evaluări
- TD N°4 Commande Des Systèmes Linéaires Continus M1Document6 paginiTD N°4 Commande Des Systèmes Linéaires Continus M1Mouad ES SoubaaiÎncă nu există evaluări
- Chapitre-Introduction Aux Systèmes MécatroniquesDocument8 paginiChapitre-Introduction Aux Systèmes Mécatroniquesoussama jouiniÎncă nu există evaluări
- TD CH21Document4 paginiTD CH21Hichem HamdiÎncă nu există evaluări
- Disponibilite ApplicationDocument4 paginiDisponibilite ApplicationKhmira WafaÎncă nu există evaluări
- Polycopie - Sebbagh - Commande Avancée PDFDocument48 paginiPolycopie - Sebbagh - Commande Avancée PDFamine juventusÎncă nu există evaluări
- Initiation SimulinkDocument4 paginiInitiation SimulinkHamdi MakniÎncă nu există evaluări
- Modèle Cinématique Du RobotDocument2 paginiModèle Cinématique Du RobotMed MaxÎncă nu există evaluări
- TP1 MatlabDocument3 paginiTP1 Matlablilasaid2010Încă nu există evaluări
- La Maintenance Basee Sur La Fiabilite (MBF) - Un Outil Puissant Pour Optimiser Les Politiques de Maintenance Illustration Dans Un Complexe Moteurs-TracteursDocument6 paginiLa Maintenance Basee Sur La Fiabilite (MBF) - Un Outil Puissant Pour Optimiser Les Politiques de Maintenance Illustration Dans Un Complexe Moteurs-TracteursSalmaÎncă nu există evaluări
- Commande D'un MCC Par Un RLF: I.Introduction GeneraleDocument17 paginiCommande D'un MCC Par Un RLF: I.Introduction GeneraleDjameleddine BougrineÎncă nu există evaluări
- Chapitre 2Document4 paginiChapitre 2Bouzid Mohamed CherifÎncă nu există evaluări
- TPs PDFDocument27 paginiTPs PDFZied Ben HamedÎncă nu există evaluări
- Présentation Automatique & Informatique Industrielle - Finale PDFDocument12 paginiPrésentation Automatique & Informatique Industrielle - Finale PDFCHERGUI ABD ELMADJIDÎncă nu există evaluări
- Présentation - Commande Optimale 2FIGE 2019-2020 - Version 2Document25 paginiPrésentation - Commande Optimale 2FIGE 2019-2020 - Version 2El GhafraouiÎncă nu există evaluări
- Regulation Industrielle Cours4Document29 paginiRegulation Industrielle Cours4Pj le Welpi0% (1)
- TP3 Asservissement PDFDocument8 paginiTP3 Asservissement PDFYoucef BoukhalfaÎncă nu există evaluări
- Transf Laplace FN TransfertDocument33 paginiTransf Laplace FN TransfertAicha B'mhÎncă nu există evaluări
- TP0 Initiation - AUTO - L2 - 2016Document4 paginiTP0 Initiation - AUTO - L2 - 2016lietard.corinne.cpamÎncă nu există evaluări
- Automatique: Les Grands Articles d'UniversalisDe la EverandAutomatique: Les Grands Articles d'UniversalisÎncă nu există evaluări
- Kinebrul-Pro - Cicatrice (Post Arsuri)Document80 paginiKinebrul-Pro - Cicatrice (Post Arsuri)Daiana100% (1)
- Comparaison Entre Rps 2000 V2011 & Eurocode 8 Etude D'Une Clinique DentaireDocument61 paginiComparaison Entre Rps 2000 V2011 & Eurocode 8 Etude D'Une Clinique DentaireSamia AdnaneÎncă nu există evaluări
- Rapport AutomatiqueDocument15 paginiRapport AutomatiqueMariam SajidÎncă nu există evaluări
- Comment Configurer Un Serveur Proxy PDFDocument2 paginiComment Configurer Un Serveur Proxy PDFDonnellÎncă nu există evaluări
- RAPPORT E-G - Batiment Communautaire ANPDocument17 paginiRAPPORT E-G - Batiment Communautaire ANPYoussef TakateÎncă nu există evaluări
- Cours Node JS 4Document2 paginiCours Node JS 4Mohamed Ramy MahjoubÎncă nu există evaluări
- Book Phystat PDFDocument89 paginiBook Phystat PDFWarda JoryÎncă nu există evaluări
- Cours CompositeDocument59 paginiCours CompositeYounes Kader100% (2)
- TD1 - MasDocument4 paginiTD1 - MasOussama Starex100% (2)
- Relativ It eDocument95 paginiRelativ It eElHabib RidenÎncă nu există evaluări
- Serie 4 Piles Et Files - 2020Document2 paginiSerie 4 Piles Et Files - 2020la luce100% (2)
- Carte TopographiqueDocument7 paginiCarte Topographiqueouided dehasÎncă nu există evaluări
- L2-Theorie de signal-TD6Document1 paginăL2-Theorie de signal-TD6chabaneoukaci58Încă nu există evaluări
- Exposé Sur Le Principe DDocument2 paginiExposé Sur Le Principe Dhouriaghouaoula2Încă nu există evaluări
- Synthèse AFCDocument2 paginiSynthèse AFCanas el guerrabÎncă nu există evaluări
- Chapitre 4. Béton de Fibres MetalliquesDocument8 paginiChapitre 4. Béton de Fibres Metalliquesabdou charefÎncă nu există evaluări
- TD-Nº2 Physique-4 PDFDocument1 paginăTD-Nº2 Physique-4 PDFsamsimÎncă nu există evaluări
- Fiche de Revision MathDocument8 paginiFiche de Revision MathKarim BoufradÎncă nu există evaluări
- 8 Poutre Rectangulaire en ELU - Xls - Résultats Aciers SimplesDocument6 pagini8 Poutre Rectangulaire en ELU - Xls - Résultats Aciers SimplesHamissa BerisÎncă nu există evaluări
- Sommaire PDFDocument3 paginiSommaire PDFLéandre Ettekri NDRIÎncă nu există evaluări
- Fonctions Circulaires PDFDocument6 paginiFonctions Circulaires PDFRai AwakeÎncă nu există evaluări
- M1info Lgreq td2Document2 paginiM1info Lgreq td2elmamoun1Încă nu există evaluări
- Projet CMDocument11 paginiProjet CMHajar EL-issiÎncă nu există evaluări
- Pfe MCNCDocument89 paginiPfe MCNCatef.selmi01Încă nu există evaluări
- VODA 2015 ArchivageDocument353 paginiVODA 2015 ArchivageIkram AbdennouriÎncă nu există evaluări
- Regles D'AssociationsDocument28 paginiRegles D'AssociationsAs Mae0% (1)
- Les-Capteurs JFDocument43 paginiLes-Capteurs JFidrissadiagne88Încă nu există evaluări
- Corrige Bac 2022 Stg. MfinDocument5 paginiCorrige Bac 2022 Stg. MfinVIEUXDANDIÎncă nu există evaluări