S-ar putea să vă placă și
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1De la EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Evaluare: 2.5 din 5 stele2.5/5 (3)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2De la EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Încă nu există evaluări
- Understanding Integrating ADC AN1041Document7 paginiUnderstanding Integrating ADC AN1041dileepank14Încă nu există evaluări
- Understanding Integrating ADCsDocument5 paginiUnderstanding Integrating ADCsjulioÎncă nu există evaluări
- Analog To Digital ConvertersDocument11 paginiAnalog To Digital Convertersمحمد ماجدÎncă nu există evaluări
- Analog To Digital Converter PDFDocument4 paginiAnalog To Digital Converter PDFtowfiqeeeÎncă nu există evaluări
- An Analysis and Design of High Performance Power Consumption Double Tail Comparator Using Gated Clock and Power Gating TechniquesDocument7 paginiAn Analysis and Design of High Performance Power Consumption Double Tail Comparator Using Gated Clock and Power Gating TechniquesIJIRSTÎncă nu există evaluări
- Analog To Digital ConvertDocument20 paginiAnalog To Digital ConvertluxiaofengÎncă nu există evaluări
- Dual Slope AdcDocument5 paginiDual Slope AdcvishvinnyÎncă nu există evaluări
- Implementation of A Low-Kickback-Noise Latched Comparator For High-Speed Analog-To-Digital Designs in 0.18Document15 paginiImplementation of A Low-Kickback-Noise Latched Comparator For High-Speed Analog-To-Digital Designs in 0.18TJPRC Publications100% (1)
- Design and Simulation of 1-Bit Sigma-Delta ADC Using Ngspice ToolDocument5 paginiDesign and Simulation of 1-Bit Sigma-Delta ADC Using Ngspice ToolIjarcsee JournalÎncă nu există evaluări
- A 10b 100MS S 1.13mW SAR ADC With Binary-Scaled Error CompensationDocument3 paginiA 10b 100MS S 1.13mW SAR ADC With Binary-Scaled Error Compensation陳昀顥Încă nu există evaluări
- Fig 1.1. ADC As An Interface Between Physical World and Digital ProcessorsDocument51 paginiFig 1.1. ADC As An Interface Between Physical World and Digital ProcessorsSupriyo SrimaniÎncă nu există evaluări
- MT-020: ADC Architectures I: The Flash Converter: by Walt KesterDocument15 paginiMT-020: ADC Architectures I: The Flash Converter: by Walt KesterlewiszenÎncă nu există evaluări
- Design of An ADC Using High Precision Comparator With Time Domain Offset CancellationDocument4 paginiDesign of An ADC Using High Precision Comparator With Time Domain Offset CancellationijtetjournalÎncă nu există evaluări
- APSP - Lecture Notes 2Document7 paginiAPSP - Lecture Notes 2Manjula sÎncă nu există evaluări
- REPORTFINALDocument21 paginiREPORTFINALReal HumanityÎncă nu există evaluări
- R - KZ I: A 12-Bit ADC Successive-Approximation-Type With Digital Error CorrectionDocument10 paginiR - KZ I: A 12-Bit ADC Successive-Approximation-Type With Digital Error CorrectionMiguel BrunoÎncă nu există evaluări
- Instrumentation AmplifierDocument3 paginiInstrumentation AmplifierFreddy LlusionÎncă nu există evaluări
- Chapter 1 IntroductionDocument39 paginiChapter 1 IntroductionNivedini KuttiÎncă nu există evaluări
- 10bit SAR ADCDocument9 pagini10bit SAR ADCKiran Kumar MandrumakaÎncă nu există evaluări
- The Integrating A/D Converter (ICL7135) : Application Note February 1999Document5 paginiThe Integrating A/D Converter (ICL7135) : Application Note February 1999ytnateÎncă nu există evaluări
- Analog To Digital ConverterDocument11 paginiAnalog To Digital ConverterFf Fr100% (1)
- 12-Bit Low-Power Fully Differential Switched Capacitor Noncalibrating Successive Approximation ADC With 1 MSsDocument6 pagini12-Bit Low-Power Fully Differential Switched Capacitor Noncalibrating Successive Approximation ADC With 1 MSsThanos van RamÎncă nu există evaluări
- Analog To Digital & Digital To Analog ConvertersDocument66 paginiAnalog To Digital & Digital To Analog ConvertersSai Krishna Kodali100% (1)
- Design of A 12-Bit SAR ADC With DigitalDocument4 paginiDesign of A 12-Bit SAR ADC With DigitalY chenÎncă nu există evaluări
- Study of Various ADCs and Compare Their Performance and ParametersDocument12 paginiStudy of Various ADCs and Compare Their Performance and ParametersijaertÎncă nu există evaluări
- Unit Iv Adc & Dac 2 MarksDocument5 paginiUnit Iv Adc & Dac 2 MarkssasirekhaÎncă nu există evaluări
- Differential Analog Data Path DC Offset Calibration MethodsDocument7 paginiDifferential Analog Data Path DC Offset Calibration MethodsLincoln RibeiroÎncă nu există evaluări
- THLDL: Wright2Document2 paginiTHLDL: Wright2Dennis AtyugrasiwiÎncă nu există evaluări
- Chapter 4Document23 paginiChapter 4Tejan Kumar SharmaÎncă nu există evaluări
- A Basic Guide To The AC Specifications of ADCsDocument28 paginiA Basic Guide To The AC Specifications of ADCsuser123phcÎncă nu există evaluări
- Introduction To Analog To Digital Converters (ADC)Document9 paginiIntroduction To Analog To Digital Converters (ADC)diether.gozumÎncă nu există evaluări
- Modeling of Sigma Delta Modulator Non Idealities With Two Step Quantization in MATLAB SIMULINK PDFDocument6 paginiModeling of Sigma Delta Modulator Non Idealities With Two Step Quantization in MATLAB SIMULINK PDFeditor_ijcatÎncă nu există evaluări
- Double Tail Latch ComparatorDocument5 paginiDouble Tail Latch ComparatorSayantan RoyÎncă nu există evaluări
- DAC AnalysisDocument19 paginiDAC Analysisమురళీధర్ ఆది ఆంధ్రుడుÎncă nu există evaluări
- A High Performance 90 NM CMOS SAR ADC With HybridDocument8 paginiA High Performance 90 NM CMOS SAR ADC With HybridSounakDuttaÎncă nu există evaluări
- Optimizing The Number of Bits/Stage in 10-Bit, 50Ms/Sec Pipelined A/D Converter Considering Area, Speed, Power and LinearityDocument7 paginiOptimizing The Number of Bits/Stage in 10-Bit, 50Ms/Sec Pipelined A/D Converter Considering Area, Speed, Power and LinearityronaldomponteÎncă nu există evaluări
- Choose The Right Regulator For The Right Job: Part 3, Component SelectionDocument10 paginiChoose The Right Regulator For The Right Job: Part 3, Component SelectionJonathan JaegerÎncă nu există evaluări
- 09 Chapter1Document20 pagini09 Chapter1SriramÎncă nu există evaluări
- Unipolar To Bipolar Analog Voltage ConversionDocument20 paginiUnipolar To Bipolar Analog Voltage ConversionGautam MonipatroÎncă nu există evaluări
- 12EC62R20 Ramesh SynopsisDocument9 pagini12EC62R20 Ramesh Synopsisprasad72207Încă nu există evaluări
- A 10-Bit 5 Msample/s ADC: Two-Step FlashDocument9 paginiA 10-Bit 5 Msample/s ADC: Two-Step FlashRaghav ChaudharyÎncă nu există evaluări
- Digital-to-Analog Analog-to-Digital Conversions: Microprocessor InterfaceDocument34 paginiDigital-to-Analog Analog-to-Digital Conversions: Microprocessor Interfaceeugen lupuÎncă nu există evaluări
- Design and Analysis of Double Tail Comparator Using Adiabatic LogicDocument7 paginiDesign and Analysis of Double Tail Comparator Using Adiabatic LogicIJSTEÎncă nu există evaluări
- Dual Slope ADC DesignDocument10 paginiDual Slope ADC DesignMoHaMMeD HaLaByÎncă nu există evaluări
- Buck Converter Design DemystifiedDocument6 paginiBuck Converter Design DemystifiedEric MorissetÎncă nu există evaluări
- An-742 Application Note: Frequency Domain Response of Switched-Capacitor AdcsDocument8 paginiAn-742 Application Note: Frequency Domain Response of Switched-Capacitor AdcskabuslagakÎncă nu există evaluări
- Calibrated Switch CapacitorDocument4 paginiCalibrated Switch CapacitorShailaja ManthaÎncă nu există evaluări
- Flyback Converter Design ThesisDocument8 paginiFlyback Converter Design Thesisleanneuhlsterlingheights100% (2)
- Basics of Digital Dac ConvertersDocument2 paginiBasics of Digital Dac ConvertersALFAKÎncă nu există evaluări
- Design and Implementation of A 10 Bit SAR ADCDocument4 paginiDesign and Implementation of A 10 Bit SAR ADCVipul ChauhanÎncă nu există evaluări
- A Fast and Reliable Top-Level Simulation Strategy For Mixed-Signal ICs - cds07 - SimDocument20 paginiA Fast and Reliable Top-Level Simulation Strategy For Mixed-Signal ICs - cds07 - SimSam HoneyÎncă nu există evaluări
- Design of Low Power 4-Bit Flash ADC Based On Standard Cells: Marcel Siadjine Njinowa, Hung Tien Bui François-Raymond BoyerDocument4 paginiDesign of Low Power 4-Bit Flash ADC Based On Standard Cells: Marcel Siadjine Njinowa, Hung Tien Bui François-Raymond BoyerSunil PandeyÎncă nu există evaluări
- Low Power Vlsi Design: Assignment-1 G Abhishek Kumar Reddy, M Manoj VarmaDocument17 paginiLow Power Vlsi Design: Assignment-1 G Abhishek Kumar Reddy, M Manoj VarmamanojÎncă nu există evaluări
- Behavioral Model of Pipeline Adc by Using SimulinkrDocument5 paginiBehavioral Model of Pipeline Adc by Using SimulinkrSounakDuttaÎncă nu există evaluări
- Analog Interfacing: LessonDocument13 paginiAnalog Interfacing: LessonSayan Kumar KhanÎncă nu există evaluări
- A 30fJ - Comparison Dynamic Bias ComparatorDocument4 paginiA 30fJ - Comparison Dynamic Bias ComparatorburakgonenÎncă nu există evaluări
- Making Accurate DC Voltage Measurements in The Presence of Series Mode AC SignalsDocument6 paginiMaking Accurate DC Voltage Measurements in The Presence of Series Mode AC SignalsRangga Kusuma NegaraÎncă nu există evaluări
- كتاب رائع فى BmsDocument49 paginiكتاب رائع فى Bmsyasmenn2010Încă nu există evaluări
- UserManual OMEGADocument16 paginiUserManual OMEGAthắngÎncă nu există evaluări
- Motorized Dampers: Spring Return Power Open or Power CloseDocument2 paginiMotorized Dampers: Spring Return Power Open or Power ClosethắngÎncă nu există evaluări
- Episode 6 Double-BookedDocument3 paginiEpisode 6 Double-BookedchemptnkÎncă nu există evaluări
- English at Work Episode 1 EnglishDocument3 paginiEnglish at Work Episode 1 EnglishMinh Trung LươngÎncă nu există evaluări
- Visual State MachineDocument71 paginiVisual State Machinethắng100% (1)
- Current Transformer OMEGADocument2 paginiCurrent Transformer OMEGAthắngÎncă nu există evaluări
- Semtech Synchronous Vs Asynchronous Buck RegulatorsDocument5 paginiSemtech Synchronous Vs Asynchronous Buck RegulatorsthắngÎncă nu există evaluări
- Adc BasicDocument141 paginiAdc BasicthắngÎncă nu există evaluări
- Doc2564 Twi Avr MSTRDocument14 paginiDoc2564 Twi Avr MSTRRov GhoshÎncă nu există evaluări
- The Application of Cvavr, Avrstudio, Proteus in Mcu TeachingDocument2 paginiThe Application of Cvavr, Avrstudio, Proteus in Mcu Teachinghusam haiderÎncă nu există evaluări
- Mds 4710-9710b Data Transceiver (2000) PDFDocument56 paginiMds 4710-9710b Data Transceiver (2000) PDFrosasojedaÎncă nu există evaluări
- Quanta Zd1 Re SchematicsDocument38 paginiQuanta Zd1 Re SchematicsPREVISTOÎncă nu există evaluări
- s6 SyllabusDocument9 paginis6 SyllabusPrabith PradeepÎncă nu există evaluări
- Audio-Technica Atw A49 SpecsheetDocument2 paginiAudio-Technica Atw A49 SpecsheetAnte NekicÎncă nu există evaluări
- Single Flux Quantum Circuit Technology Innovation For Backbone Router ApplicationsDocument7 paginiSingle Flux Quantum Circuit Technology Innovation For Backbone Router ApplicationsMAZEN S MALÎncă nu există evaluări
- 16-Bit, 100 Ksps/200 Ksps Bicmos A/D Converter: W 10 V, 5 V and 3.3 VDocument24 pagini16-Bit, 100 Ksps/200 Ksps Bicmos A/D Converter: W 10 V, 5 V and 3.3 Vlongtrandang5867Încă nu există evaluări
- BreezeULTRA Product Presentation InternalDocument51 paginiBreezeULTRA Product Presentation Internaljimmyvazquez86Încă nu există evaluări
- SECAM System: and D Where DDocument3 paginiSECAM System: and D Where Dsafu_117Încă nu există evaluări
- Circuit Diagrams: MAIN PWB CIRCUIT DIAGRAM (AV-29B316/B) (1/4) (2/4) SHEET1Document4 paginiCircuit Diagrams: MAIN PWB CIRCUIT DIAGRAM (AV-29B316/B) (1/4) (2/4) SHEET1Fede DiÎncă nu există evaluări
- SPDocument39 paginiSPShyam JalanÎncă nu există evaluări
- HP Proliant Dl380 G4 Storage Server: Data SheetDocument4 paginiHP Proliant Dl380 G4 Storage Server: Data SheetoonÎncă nu există evaluări
- DSP Lecture 02Document121 paginiDSP Lecture 02sitaram_1100% (1)
- Paper 12Document9 paginiPaper 12Hari ShankarÎncă nu există evaluări
- Turntable ManualDocument2 paginiTurntable Manualreneleones0% (1)
- Computer Engineering: Computer Engineering Electronic Devices For Ubiquitous Computing OptionDocument2 paginiComputer Engineering: Computer Engineering Electronic Devices For Ubiquitous Computing OptionAbiy BerheÎncă nu există evaluări
- LG 42LC46 Ld73a (SM)Document47 paginiLG 42LC46 Ld73a (SM)Jose Maria Cambero100% (1)
- An 164 Vinculum II USB Slave Writing A Function DriverDocument22 paginiAn 164 Vinculum II USB Slave Writing A Function DriverBruno CamposÎncă nu există evaluări
- 2 Ar11k-220s380m 11KW ObcDocument2 pagini2 Ar11k-220s380m 11KW Obctrantuan88Încă nu există evaluări
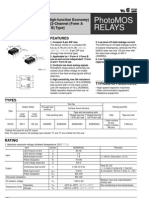
- NAIS DatasheetDocument3 paginiNAIS Datasheetshinning.amar5336Încă nu există evaluări
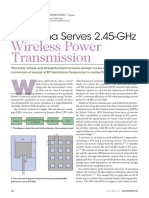
- Rectenna Serves 2.45-Ghz: Wireless Power TransmissionDocument4 paginiRectenna Serves 2.45-Ghz: Wireless Power TransmissionArnab PattanayakÎncă nu există evaluări
- Voltage Clamp CircuitsDocument6 paginiVoltage Clamp Circuitswww.vyeko_.bloger.hrÎncă nu există evaluări
- HW2Document4 paginiHW2Lhaiszah AlagonÎncă nu există evaluări
- Chapter 9 Analysis and Design of Digital Filter: Z L Z X Z Y Z HDocument42 paginiChapter 9 Analysis and Design of Digital Filter: Z L Z X Z Y Z HRajasekhar AtlaÎncă nu există evaluări
- MaxTune Intelligent Servo DriveDocument62 paginiMaxTune Intelligent Servo DrivejuliangoalÎncă nu există evaluări
- Isscc2022 000016CLDocument17 paginiIsscc2022 000016CLdashuai huaÎncă nu există evaluări
- LE26C450E LE32C450E LE26C454E LE32C454E: Связывайтесь с SAMSUNG по всему миру Страна Цeнтр пoддeржки пoкупaтeлeй Веб-узелDocument157 paginiLE26C450E LE32C450E LE26C454E LE32C454E: Связывайтесь с SAMSUNG по всему миру Страна Цeнтр пoддeржки пoкупaтeлeй Веб-узелВасилий УтыркинÎncă nu există evaluări
- SGS Technical Note 150 - 40 Industrial Application IdeasDocument32 paginiSGS Technical Note 150 - 40 Industrial Application IdeasPeterÎncă nu există evaluări
- Automatic Load Sharing of Transformers: Ashish R. Ambalkar Nitesh M. Bhoyar Vivek V. Badarkhe Vivek B. BatheDocument3 paginiAutomatic Load Sharing of Transformers: Ashish R. Ambalkar Nitesh M. Bhoyar Vivek V. Badarkhe Vivek B. BatheBhart NiraniaÎncă nu există evaluări
- MicroDAC UserGuide v1.0Document2 paginiMicroDAC UserGuide v1.0DouglasÎncă nu există evaluări