S-ar putea să vă placă și
- Digital Image Processing: Fundamentals and ApplicationsDe la EverandDigital Image Processing: Fundamentals and ApplicationsÎncă nu există evaluări
- AN IMPROVED TECHNIQUE FOR MIX NOISE AND BLURRING REMOVAL IN DIGITAL IMAGESDe la EverandAN IMPROVED TECHNIQUE FOR MIX NOISE AND BLURRING REMOVAL IN DIGITAL IMAGESÎncă nu există evaluări
- Digital Image Definitions&TransformationsDocument18 paginiDigital Image Definitions&TransformationsAnand SithanÎncă nu există evaluări
- Digital Image Processing Full ReportDocument4 paginiDigital Image Processing Full ReportLovepreet VirkÎncă nu există evaluări
- Chapter2 CVDocument79 paginiChapter2 CVAschalew AyeleÎncă nu există evaluări
- Batch 11 (Histogram)Document42 paginiBatch 11 (Histogram)Abhinav KumarÎncă nu există evaluări
- E21Document34 paginiE21aishuvc1822Încă nu există evaluări
- Ec2029 - Digital Image ProcessingDocument143 paginiEc2029 - Digital Image ProcessingSedhumadhavan SÎncă nu există evaluări
- What Is Image Processing? Explain Fundamental Steps in Digital Image ProcessingDocument15 paginiWhat Is Image Processing? Explain Fundamental Steps in Digital Image ProcessingraviÎncă nu există evaluări
- Image Processing PresentationDocument10 paginiImage Processing PresentationSagar A ShahÎncă nu există evaluări
- Unit 6Document15 paginiUnit 6Raviteja UdumudiÎncă nu există evaluări
- Dip 05Document11 paginiDip 05Noor-Ul AinÎncă nu există evaluări
- DIP 2 MarksDocument34 paginiDIP 2 MarkspoongodiÎncă nu există evaluări
- 1Document26 pagini1ahmedÎncă nu există evaluări
- Linear ReportDocument4 paginiLinear ReportMahmoud Ahmed 202201238Încă nu există evaluări
- Unit - 4: Define Image Compression. Explain About The Redundancies in A Digital ImageDocument24 paginiUnit - 4: Define Image Compression. Explain About The Redundancies in A Digital Imageloya suryaÎncă nu există evaluări
- Image Compression & Redundancies in A Digital Image:: Interpixel Redundancy, andDocument7 paginiImage Compression & Redundancies in A Digital Image:: Interpixel Redundancy, andLavanyaÎncă nu există evaluări
- Image Enhancements ImageDocument11 paginiImage Enhancements ImageMilind TambeÎncă nu există evaluări
- ST - Anne'S: College of Engineering & TechnologyDocument23 paginiST - Anne'S: College of Engineering & TechnologyANNAMALAIÎncă nu există evaluări
- DIP-LECTURE - NOTES FinalDocument222 paginiDIP-LECTURE - NOTES FinalBoobeshÎncă nu există evaluări
- Dip Lecture NotesDocument210 paginiDip Lecture NotesR Murugesan SIÎncă nu există evaluări
- 1.define Image Compression. Explain About The Redundancies in A Digital ImageDocument24 pagini1.define Image Compression. Explain About The Redundancies in A Digital ImagesubbuÎncă nu există evaluări
- Ganesh College of Engineering, Salem: Ec8093-Digital Image Processing NotesDocument239 paginiGanesh College of Engineering, Salem: Ec8093-Digital Image Processing NotesVinod Vinod BÎncă nu există evaluări
- MC0086Document14 paginiMC0086puneetchawla2003Încă nu există evaluări
- Assignment-1 Digital Image ProcessingDocument8 paginiAssignment-1 Digital Image ProcessingNiharika SinghÎncă nu există evaluări
- UNIT 5: Image CompressionDocument25 paginiUNIT 5: Image CompressionSravanti ReddyÎncă nu există evaluări
- Wavelet Transform: A Recent Image Compression Algorithm: Shivani Pandey, A.G. RaoDocument4 paginiWavelet Transform: A Recent Image Compression Algorithm: Shivani Pandey, A.G. RaoIJERDÎncă nu există evaluări
- Unit5 CompressionDocument17 paginiUnit5 Compressiongiri rami reddyÎncă nu există evaluări
- DIP NotesDocument22 paginiDIP NotesSuman RoyÎncă nu există evaluări
- TCS 707-SM02Document10 paginiTCS 707-SM02Anurag PokhriyalÎncă nu există evaluări
- Digital Image Processing IntroductionDocument33 paginiDigital Image Processing IntroductionAshish KumarÎncă nu există evaluări
- Chapter 1Document14 paginiChapter 1Madhukumar2193Încă nu există evaluări
- Image ProcessingDocument9 paginiImage Processingnishu chaudharyÎncă nu există evaluări
- Digital Image ProcessingDocument9 paginiDigital Image ProcessingRini SujanaÎncă nu există evaluări
- Image ProcessingDocument25 paginiImage Processingubuntu_linuxÎncă nu există evaluări
- MUCLecture 2022 81853317Document19 paginiMUCLecture 2022 81853317capra seoÎncă nu există evaluări
- Chapter 02Document58 paginiChapter 02Waleed DhmanÎncă nu există evaluări
- Dip Unit 1Document33 paginiDip Unit 1Utsav VermaÎncă nu există evaluări
- January 10, 2018Document22 paginiJanuary 10, 2018Darshan ShahÎncă nu există evaluări
- Digital Image ProcessingDocument10 paginiDigital Image ProcessingAnil KumarÎncă nu există evaluări
- DIGITAL IMAGE PROCESSING Full ReportDocument10 paginiDIGITAL IMAGE PROCESSING Full Reportammayi9845_930467904Încă nu există evaluări
- Chapter 4brev - Digital Image ProcessingDocument85 paginiChapter 4brev - Digital Image ProcessingFaran MasoodÎncă nu există evaluări
- Digital Image Processing Tutorial Questions AnswersDocument38 paginiDigital Image Processing Tutorial Questions Answersanandbabugopathoti100% (1)
- Ec1009 Digital Image ProcessingDocument37 paginiEc1009 Digital Image Processinganon-694871100% (15)
- Fundamental Steps in Digital Image ProcessingDocument26 paginiFundamental Steps in Digital Image Processingboose kutty dÎncă nu există evaluări
- Digital Image Processing Full ReportDocument9 paginiDigital Image Processing Full ReportAkhil ChÎncă nu există evaluări
- Digital Image Processing Question Answer BankDocument69 paginiDigital Image Processing Question Answer Bankkarpagamkj759590% (72)
- Unit 4Document13 paginiUnit 4Manish SontakkeÎncă nu există evaluări
- Tone Mapping: Tone Mapping: Illuminating Perspectives in Computer VisionDe la EverandTone Mapping: Tone Mapping: Illuminating Perspectives in Computer VisionÎncă nu există evaluări
- Histogram Equalization: Enhancing Image Contrast for Enhanced Visual PerceptionDe la EverandHistogram Equalization: Enhancing Image Contrast for Enhanced Visual PerceptionÎncă nu există evaluări
- Image Compression: Efficient Techniques for Visual Data OptimizationDe la EverandImage Compression: Efficient Techniques for Visual Data OptimizationÎncă nu există evaluări
- The History of Visual Magic in Computers: How Beautiful Images are Made in CAD, 3D, VR and ARDe la EverandThe History of Visual Magic in Computers: How Beautiful Images are Made in CAD, 3D, VR and ARÎncă nu există evaluări
- New Approaches to Image Processing based Failure Analysis of Nano-Scale ULSI DevicesDe la EverandNew Approaches to Image Processing based Failure Analysis of Nano-Scale ULSI DevicesEvaluare: 5 din 5 stele5/5 (1)
- Underwater Computer Vision: Exploring the Depths of Computer Vision Beneath the WavesDe la EverandUnderwater Computer Vision: Exploring the Depths of Computer Vision Beneath the WavesÎncă nu există evaluări
- Esprit AlgorithmDocument5 paginiEsprit Algorithmrameshmc1Încă nu există evaluări
- Clock Synchronization: Ronilda Lacson, MD, SMDocument34 paginiClock Synchronization: Ronilda Lacson, MD, SMMahender NaikÎncă nu există evaluări
- IEEE Papers To Be DownloadedDocument1 paginăIEEE Papers To Be DownloadedMahender NaikÎncă nu există evaluări
- EspritDocument5 paginiEspritMahender NaikÎncă nu există evaluări
- Digital Image ProcessingDocument18 paginiDigital Image ProcessingMahender NaikÎncă nu există evaluări
- 2013-01-28 203445 International Fault Codes Eges350 DTCDocument8 pagini2013-01-28 203445 International Fault Codes Eges350 DTCVeterano del CaminoÎncă nu există evaluări
- Cap1 - Engineering in TimeDocument12 paginiCap1 - Engineering in TimeHair Lopez100% (1)
- بتول ماجد سعيد (تقرير السيطرة على تلوث الهواء)Document5 paginiبتول ماجد سعيد (تقرير السيطرة على تلوث الهواء)Batool MagedÎncă nu există evaluări
- Does Adding Salt To Water Makes It Boil FasterDocument1 paginăDoes Adding Salt To Water Makes It Boil Fasterfelixcouture2007Încă nu există evaluări
- Management Accounting by Cabrera Solution Manual 2011 PDFDocument3 paginiManagement Accounting by Cabrera Solution Manual 2011 PDFClaudette Clemente100% (1)
- Categorical SyllogismDocument3 paginiCategorical SyllogismYan Lean DollisonÎncă nu există evaluări
- PDS DeltaV SimulateDocument9 paginiPDS DeltaV SimulateJesus JuarezÎncă nu există evaluări
- Maximum and Minimum PDFDocument3 paginiMaximum and Minimum PDFChai Usajai UsajaiÎncă nu există evaluări
- BIOAVAILABILITY AND BIOEQUIVALANCE STUDIES Final - PPTX'Document32 paginiBIOAVAILABILITY AND BIOEQUIVALANCE STUDIES Final - PPTX'Md TayfuzzamanÎncă nu există evaluări
- Anker Soundcore Mini, Super-Portable Bluetooth SpeakerDocument4 paginiAnker Soundcore Mini, Super-Portable Bluetooth SpeakerM.SaadÎncă nu există evaluări
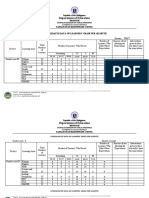
- Department of Education: Consolidated Data On Learners' Grade Per QuarterDocument4 paginiDepartment of Education: Consolidated Data On Learners' Grade Per QuarterUsagi HamadaÎncă nu există evaluări
- Man Bni PNT XXX 105 Z015 I17 Dok 886160 03 000Document36 paginiMan Bni PNT XXX 105 Z015 I17 Dok 886160 03 000Eozz JaorÎncă nu există evaluări
- End-Of-Chapter Answers Chapter 7 PDFDocument12 paginiEnd-Of-Chapter Answers Chapter 7 PDFSiphoÎncă nu există evaluări
- Etag 002 PT 2 PDFDocument13 paginiEtag 002 PT 2 PDFRui RibeiroÎncă nu există evaluări
- CIPD L5 EML LOL Wk3 v1.1Document19 paginiCIPD L5 EML LOL Wk3 v1.1JulianÎncă nu există evaluări
- 11-Rubber & PlasticsDocument48 pagini11-Rubber & PlasticsJack NgÎncă nu există evaluări
- TM Mic Opmaint EngDocument186 paginiTM Mic Opmaint Engkisedi2001100% (2)
- Service Quality Dimensions of A Philippine State UDocument10 paginiService Quality Dimensions of A Philippine State UVilma SottoÎncă nu există evaluări
- CPD - SampleDocument3 paginiCPD - SampleLe Anh DungÎncă nu există evaluări
- Stress Management HandoutsDocument3 paginiStress Management HandoutsUsha SharmaÎncă nu există evaluări
- Approvals Management Responsibilities and Setups in AME.B PDFDocument20 paginiApprovals Management Responsibilities and Setups in AME.B PDFAli LoganÎncă nu există evaluări
- IPA Smith Osborne21632Document28 paginiIPA Smith Osborne21632johnrobertbilo.bertilloÎncă nu există evaluări
- LC For Akij Biax Films Limited: CO2012102 0 December 22, 2020Document2 paginiLC For Akij Biax Films Limited: CO2012102 0 December 22, 2020Mahadi Hassan ShemulÎncă nu există evaluări
- Dog & Kitten: XshaperDocument17 paginiDog & Kitten: XshaperAll PrintÎncă nu există evaluări
- Radio Ac DecayDocument34 paginiRadio Ac DecayQassem MohaidatÎncă nu există evaluări
- Aditya Academy Syllabus-II 2020Document7 paginiAditya Academy Syllabus-II 2020Tarun MajumdarÎncă nu există evaluări
- English Test For Grade 7 (Term 2)Document6 paginiEnglish Test For Grade 7 (Term 2)UyenPhuonggÎncă nu există evaluări
- File RecordsDocument161 paginiFile RecordsAtharva Thite100% (2)
- Atoma Amd Mol&Us CCTK) : 2Nd ErmDocument4 paginiAtoma Amd Mol&Us CCTK) : 2Nd ErmjanviÎncă nu există evaluări