S-ar putea să vă placă și
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- Dhingra Classes Computer HindiDocument92 paginiDhingra Classes Computer Hindiarun1988888Încă nu există evaluări
- Project28 Final PaperDocument41 paginiProject28 Final PapershashikumarpawarÎncă nu există evaluări
- EED Lab ArunDocument17 paginiEED Lab Arunarun1988888Încă nu există evaluări
- Jec RanjeetDocument9 paginiJec Ranjeetarun1988888Încă nu există evaluări
- Cell Phone Based Voting MachineDocument56 paginiCell Phone Based Voting MachineHemant100% (5)
- Arun MicrowaveDocument18 paginiArun Microwavearun1988888Încă nu există evaluări
- Current Affairs Quiz August - September 2010Document18 paginiCurrent Affairs Quiz August - September 2010arun1988888Încă nu există evaluări
- Current GK July 2010Document5 paginiCurrent GK July 2010arun1988888Încă nu există evaluări
- GSM TechnologyDocument28 paginiGSM Technologyarun1988888Încă nu există evaluări
- Railway Recruitment Board (RRB) Exam - Question Paper SolvedDocument5 paginiRailway Recruitment Board (RRB) Exam - Question Paper Solvedarun1988888Încă nu există evaluări
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (119)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Unit 5 OsDocument5 paginiUnit 5 OsPrashant JainÎncă nu există evaluări
- PythonDocument65 paginiPythonvishal dasÎncă nu există evaluări
- People Tools Certification QuestionsDocument6 paginiPeople Tools Certification QuestionsGanesh.am100% (3)
- C Programming Viva QuestionsDocument2 paginiC Programming Viva QuestionsSanith S LÎncă nu există evaluări
- Harmony ABB Primary InterfaceDocument223 paginiHarmony ABB Primary InterfaceCristian Tilinschi100% (1)
- C Programs NewComputer Programming Subject Notes. Subject Code : GE6151 Anna UniversityDocument4 paginiC Programs NewComputer Programming Subject Notes. Subject Code : GE6151 Anna UniversitysurendiranÎncă nu există evaluări
- Na2009 Enus Devii 03Document48 paginiNa2009 Enus Devii 03Sudhanshu SharmaÎncă nu există evaluări
- Report Basic CDocument6 paginiReport Basic CAina SyafiqahÎncă nu există evaluări
- EE 105: MATLAB As An Engineer's Problem Solving ToolDocument3 paginiEE 105: MATLAB As An Engineer's Problem Solving Toolthinkberry22Încă nu există evaluări
- Release Notes For C51Document41 paginiRelease Notes For C51DharishÎncă nu există evaluări
- Introduction to RPG IV and ILE conceptsDocument28 paginiIntroduction to RPG IV and ILE conceptssubash_dotÎncă nu există evaluări
- JNTU Hyderabad B.Tech ME Course StructureDocument89 paginiJNTU Hyderabad B.Tech ME Course StructureM.kishore KumarÎncă nu există evaluări
- A Feasibility Study of A Taglish Software of Basic C ProgrammingDocument38 paginiA Feasibility Study of A Taglish Software of Basic C ProgrammingFaye Reyes100% (1)
- C++ arrays, structures and classes quizDocument4 paginiC++ arrays, structures and classes quizAhmad AquinoÎncă nu există evaluări
- MCQs About R Language - Statistics SoftwareDocument3 paginiMCQs About R Language - Statistics SoftwareMuhammad Imdadullah100% (4)
- Probe Software For Machine Tools Data Sheet - Program Selection ListDocument14 paginiProbe Software For Machine Tools Data Sheet - Program Selection ListTaner AkkasÎncă nu există evaluări
- Interface Error ManagementDocument22 paginiInterface Error ManagementPadmanabha Narayan0% (1)
- ABB Robot and Safe MoveDocument152 paginiABB Robot and Safe Moveeureka88Încă nu există evaluări
- Cisco MCQDocument9 paginiCisco MCQHimanshu ChauhanÎncă nu există evaluări
- Advanced Persistent ThreatsDocument22 paginiAdvanced Persistent ThreatsjuanÎncă nu există evaluări
- Correct Answer: 3Document11 paginiCorrect Answer: 3Neha VermaÎncă nu există evaluări
- 1.python Basics EdxDocument98 pagini1.python Basics Edxvishal tyagiÎncă nu există evaluări
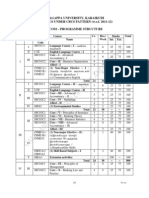
- Alagappa University, Karaikudi SYLLABUS UNDER CBCS PATTERN (W.e.f. 2011-12)Document26 paginiAlagappa University, Karaikudi SYLLABUS UNDER CBCS PATTERN (W.e.f. 2011-12)Mathan NaganÎncă nu există evaluări
- SCJPDocument8 paginiSCJPitsnewÎncă nu există evaluări
- Week 2Document8 paginiWeek 2aakar845Încă nu există evaluări
- Perl For Bio in For Ma TicsDocument158 paginiPerl For Bio in For Ma TicsAmitha SampathÎncă nu există evaluări
- Ba Sanskrit ItDocument67 paginiBa Sanskrit ItjeevindiaÎncă nu există evaluări
- CSCE 156 Homework 05 Spring 2012 Algorithm Analysis and SortingDocument6 paginiCSCE 156 Homework 05 Spring 2012 Algorithm Analysis and SortingNico ScheinostÎncă nu există evaluări
- Introduction to C# and .NET Framework FundamentalsDocument123 paginiIntroduction to C# and .NET Framework Fundamentalssuresh_reddy_10Încă nu există evaluări
- Introduction To Computing (CSEN1201) SyllabusDocument2 paginiIntroduction To Computing (CSEN1201) Syllabussomenath_sengupta100% (1)