S-ar putea să vă placă și
- BabaDocument2 paginiBabaakshaypagariyaÎncă nu există evaluări
- Place & Route Tutorial #1: I. SetupDocument13 paginiPlace & Route Tutorial #1: I. SetupDurgaPrasadÎncă nu există evaluări
- FSM IC Validator 2018Document36 paginiFSM IC Validator 2018Pramod Reddy RÎncă nu există evaluări
- 1 Developed by Verified By: Syllabus & Curriculum For Advanced Course in Msoffice (E-Vidya)Document15 pagini1 Developed by Verified By: Syllabus & Curriculum For Advanced Course in Msoffice (E-Vidya)Ashish TripathiÎncă nu există evaluări
- Digital Design FlowDocument71 paginiDigital Design FlowSanjuÎncă nu există evaluări
- Digital Soc Synthesis, Sta, FV and EcoDocument2 paginiDigital Soc Synthesis, Sta, FV and EcoEnoch L SÎncă nu există evaluări
- Ccopt InnovusDocument3 paginiCcopt InnovussagarÎncă nu există evaluări
- Lesson8 CMOS GatesDocument33 paginiLesson8 CMOS GatestienchuanÎncă nu există evaluări
- Scripting For Eda ToolsDocument7 paginiScripting For Eda ToolsravindarsinghÎncă nu există evaluări
- 7338 3cd9 PDFDocument3 pagini7338 3cd9 PDFRaviÎncă nu există evaluări
- Emerging Trends in VLSI Design: A Big Question..???Document102 paginiEmerging Trends in VLSI Design: A Big Question..???Madan R HonnalagereÎncă nu există evaluări
- VLSI Physical Design - Physical Design Interview Question Part 2Document2 paginiVLSI Physical Design - Physical Design Interview Question Part 2srinathÎncă nu există evaluări
- Synthesis Flow Overview (VLSI) - Introduction - by ANKIT MAHAJAN - MediumDocument2 paginiSynthesis Flow Overview (VLSI) - Introduction - by ANKIT MAHAJAN - MediumRAZÎncă nu există evaluări
- Resume Arvind ShrivastavaDocument2 paginiResume Arvind ShrivastavaArvind ShrivastavaÎncă nu există evaluări
- Timing Aware Dummy Metal Fill MethodologyDocument3 paginiTiming Aware Dummy Metal Fill MethodologyraveneyesdeadÎncă nu există evaluări
- System Verilog TrainingDocument2 paginiSystem Verilog TrainingVlsi GuruÎncă nu există evaluări
- Ccopt Lab 2 (Ccopt Rak)Document3 paginiCcopt Lab 2 (Ccopt Rak)Baluvu JagadishÎncă nu există evaluări
- GvimDocument8 paginiGvimapi-3725321100% (3)
- Practical Exposure To Writing TCL With Examples - iVLSI - All About VLSIDocument3 paginiPractical Exposure To Writing TCL With Examples - iVLSI - All About VLSIshivangpanaraÎncă nu există evaluări
- Pulsed Latch Timing Analysis: Product Version: Tempus 15.1 October, 2015Document21 paginiPulsed Latch Timing Analysis: Product Version: Tempus 15.1 October, 2015Anshita AgarwalÎncă nu există evaluări
- 2015.06 Router ICV Incremental TrainingDocument63 pagini2015.06 Router ICV Incremental TrainingmanojkumarÎncă nu există evaluări
- Path SensitizationDocument34 paginiPath Sensitizationvinovictory8571100% (1)
- Verification TutorialDocument14 paginiVerification TutorialAdemar Gregoruti JuniorÎncă nu există evaluări
- 28Nm and Below, New Path and Beyond: Danny Rittman PHDDocument15 pagini28Nm and Below, New Path and Beyond: Danny Rittman PHDAbhesh Kumar TripathiÎncă nu există evaluări
- VHDL PDFDocument112 paginiVHDL PDFvivek patelÎncă nu există evaluări
- How Does The Clock Skew Violate Setup and Hold Time Contraints? What Are The Common Errors in Constraints?Document11 paginiHow Does The Clock Skew Violate Setup and Hold Time Contraints? What Are The Common Errors in Constraints?Sai KumarÎncă nu există evaluări
- Innovus addSpareInstanceDocument2 paginiInnovus addSpareInstancesagarÎncă nu există evaluări
- Pan Baidu Search and DownloadDocument4 paginiPan Baidu Search and DownloadBen GoldmanÎncă nu există evaluări
- Introduction To VHDLDocument88 paginiIntroduction To VHDLpusd_90Încă nu există evaluări
- Metal Fill: - Ashutosh Kulkarni Project EngineerDocument20 paginiMetal Fill: - Ashutosh Kulkarni Project EngineerUtkarsh AgrawalÎncă nu există evaluări
- Routing: by Manjunatha Naik V Asst. Professor Dept. of ECE, RNSITDocument26 paginiRouting: by Manjunatha Naik V Asst. Professor Dept. of ECE, RNSITmanjunathanaikvÎncă nu există evaluări
- Static Timing Analysis - SureshDocument33 paginiStatic Timing Analysis - SureshSuresh BharathÎncă nu există evaluări
- Single-Mask Double-Patterning Lithography: Rani S. Ghaida, George Torres, and Puneet GuptaDocument21 paginiSingle-Mask Double-Patterning Lithography: Rani S. Ghaida, George Torres, and Puneet GuptaRenju TjÎncă nu există evaluări
- CPF 1.1 Pocket GuideDocument16 paginiCPF 1.1 Pocket GuideLakshman YandapalliÎncă nu există evaluări
- Unix Basics and TCL ScriptingDocument49 paginiUnix Basics and TCL ScriptingTaha PerwaizÎncă nu există evaluări
- Ring Oscillator IssueDocument2 paginiRing Oscillator IssueAnonymous Mw7ZFF3A3Încă nu există evaluări
- Synthesis QuestionsDocument4 paginiSynthesis QuestionsSupraja VedulaÎncă nu există evaluări
- Design: PlanningDocument214 paginiDesign: PlanningShounak DasÎncă nu există evaluări
- Synopsys Formality WorkshopDocument293 paginiSynopsys Formality WorkshopBasem HeshamÎncă nu există evaluări
- Ccopt DesignDocument2 paginiCcopt DesignStudentÎncă nu există evaluări
- 3.script For Reporting The Number of Different Buffer References Used For Fixing Hold ViolationsDocument2 pagini3.script For Reporting The Number of Different Buffer References Used For Fixing Hold ViolationsmanojkumarÎncă nu există evaluări
- Multi Threaded Optimizing Technique For Dynamic Binary Translator CrossBitDocument8 paginiMulti Threaded Optimizing Technique For Dynamic Binary Translator CrossBityeriverÎncă nu există evaluări
- Sram Low Power DecoderDocument7 paginiSram Low Power DecoderKedhar MallaÎncă nu există evaluări
- Starrc DsDocument7 paginiStarrc DsNishanth BaratamÎncă nu există evaluări
- Tutorial InnovusDocument47 paginiTutorial Innovusijalab1Încă nu există evaluări
- Vector-Based Peak Current Analysis During Wafer Test of Flip-Chip DesignsDocument206 paginiVector-Based Peak Current Analysis During Wafer Test of Flip-Chip DesignsLakshman YandapalliÎncă nu există evaluări
- Karan Aggarwal STA 3.2yrs Synopsys DelhiDocument2 paginiKaran Aggarwal STA 3.2yrs Synopsys DelhiVikas GirdharÎncă nu există evaluări
- 1.FPGA Design Flow Processes PropertiesDocument5 pagini1.FPGA Design Flow Processes Propertiesmachnik1486624Încă nu există evaluări
- Pipelining & Retiming of Digital CircuitsDocument47 paginiPipelining & Retiming of Digital CircuitsGautham PopuriÎncă nu există evaluări
- Static Timing Analysis FactsDocument2 paginiStatic Timing Analysis FactsNaveen SilveriÎncă nu există evaluări
- Lec 15 Multi VDDDocument17 paginiLec 15 Multi VDDvpsampathÎncă nu există evaluări
- Guidelines For Design Synthesis Using Synopsys Design Compiler Design SynthesisDocument13 paginiGuidelines For Design Synthesis Using Synopsys Design Compiler Design Synthesisnishad_86Încă nu există evaluări
- Digital-On-Top Physical Verification: LVS and DRC Using Innovus and CalibreDocument58 paginiDigital-On-Top Physical Verification: LVS and DRC Using Innovus and CalibreKumar Kumar100% (1)
- ICC2technology LibDocument7 paginiICC2technology LibRAZÎncă nu există evaluări
- Basic Timing Constraints TutorialDocument34 paginiBasic Timing Constraints Tutorialapi-3737190100% (3)
- Ece5745 Tut2 DCDocument15 paginiEce5745 Tut2 DCMisbahÎncă nu există evaluări
- Ex 02Document14 paginiEx 02elumalaianithaÎncă nu există evaluări
- 5.script To Report The Filler Cells in A DesignDocument2 pagini5.script To Report The Filler Cells in A DesignmanojkumarÎncă nu există evaluări
- More On PipeliningDocument34 paginiMore On PipeliningRAHA TUDU100% (1)
- Q4X Stainless Steel Laser Sensor: Instruction ManualDocument42 paginiQ4X Stainless Steel Laser Sensor: Instruction Manualtigres1Încă nu există evaluări
- C ElanchezhianDocument8 paginiC ElanchezhiankeshavuvceÎncă nu există evaluări
- Fuel & Ignition System Engine VolvoDocument1 paginăFuel & Ignition System Engine VolvoImran MehboobÎncă nu există evaluări
- Mba Cet 2018Document2 paginiMba Cet 2018Aarav AroraÎncă nu există evaluări
- Manual Yamaha Clavinova P100Document69 paginiManual Yamaha Clavinova P100Nelon Rocha100% (1)
- ETG3000 BrochureDocument9 paginiETG3000 BrochureMayolo MartinezÎncă nu există evaluări
- Unit-I Introduction To Erp Enterprise Resource Planning (ERP) Is An Integrated Computer-Based SystemDocument51 paginiUnit-I Introduction To Erp Enterprise Resource Planning (ERP) Is An Integrated Computer-Based Systemchandru5g100% (4)
- FSP 851Document3 paginiFSP 851RICHIÎncă nu există evaluări
- Manual Safety Relays 3SK2 en-USDocument352 paginiManual Safety Relays 3SK2 en-USKarina Ospina100% (3)
- A Transactive Energy Future PDFDocument6 paginiA Transactive Energy Future PDFGilberto CastrejeÎncă nu există evaluări
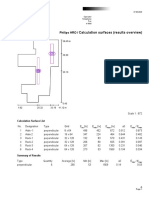
- Calculation Surfaces (Results Overview) : Philips HRODocument4 paginiCalculation Surfaces (Results Overview) : Philips HROsanaÎncă nu există evaluări
- E TDS ManualDocument30 paginiE TDS ManualJeetendra ShresthaÎncă nu există evaluări
- Hydraulic Vehicle Lift ST List of Parts and Appendices Stertil B.V BDocument24 paginiHydraulic Vehicle Lift ST List of Parts and Appendices Stertil B.V BOvidiu PopaÎncă nu există evaluări
- Practice Exam 2Document22 paginiPractice Exam 2Sealtiel1020100% (1)
- Automatic Transmission: Models FA and FB With Allison AT542Document22 paginiAutomatic Transmission: Models FA and FB With Allison AT542nguyenxuanvinhv3Încă nu există evaluări
- T8000 Type2 USER MANUAL - 47501358-A0 EN 2016-6-1Document10 paginiT8000 Type2 USER MANUAL - 47501358-A0 EN 2016-6-1AerdiaÎncă nu există evaluări
- Blender 04Document38 paginiBlender 04Ana Maria100% (1)
- Generic TWS600S Service ManualDocument113 paginiGeneric TWS600S Service ManualWise So100% (2)
- Aj 245 LTDocument1 paginăAj 245 LTHernan B.Încă nu există evaluări
- Linear ProgrammingDocument6 paginiLinear ProgrammingabeerÎncă nu există evaluări
- CFD Analysis of Free Cooling of Modular Data CentersDocument4 paginiCFD Analysis of Free Cooling of Modular Data CentersEmad AbdelsamadÎncă nu există evaluări
- Harden's Spices Model For Biochemistry in Medical CurriculumDocument10 paginiHarden's Spices Model For Biochemistry in Medical CurriculumGlobal Research and Development Services100% (1)
- 2SK3377Document5 pagini2SK3377Jheremy Sebastian TorresÎncă nu există evaluări
- UbnfilelDocument3 paginiUbnfilelJorge LorenzoÎncă nu există evaluări
- 4 Ataxle PDFDocument22 pagini4 Ataxle PDFAnonymous XTkln6H100% (1)
- 6141-Article Text PDF-9899-1-10-20130718 PDFDocument15 pagini6141-Article Text PDF-9899-1-10-20130718 PDFGroup-IV ADAM 2019-20Încă nu există evaluări
- Surface Finish StandardDocument3 paginiSurface Finish StandardvinodmysoreÎncă nu există evaluări
- Lab No 8Document5 paginiLab No 8LO Ver JG100% (1)
- 1-Introduction To Process ControlDocument30 pagini1-Introduction To Process ControlRazif Metta100% (4)
- Bituthene Mastic - Data SheetDocument2 paginiBituthene Mastic - Data SheettamilnishaÎncă nu există evaluări