S-ar putea să vă placă și
- Illegal Parking Notification System Using Image Feature Extraction MethodDocument22 paginiIllegal Parking Notification System Using Image Feature Extraction MethodShreya KowadkarÎncă nu există evaluări
- Types of Recursion in CDocument16 paginiTypes of Recursion in CJesbelJohnson100% (1)
- AI-Based Picture Translation App: 1) Background/ Problem StatementDocument7 paginiAI-Based Picture Translation App: 1) Background/ Problem Statementtejas patilÎncă nu există evaluări
- OOP Lab4 Muhammad Muaaz-052Document28 paginiOOP Lab4 Muhammad Muaaz-052MuhammadMuaaz KhalidÎncă nu există evaluări
- Tech Seminar ReportDocument5 paginiTech Seminar ReportSaikumar ThuraiÎncă nu există evaluări
- Project Proposal For Library Management PDFDocument1 paginăProject Proposal For Library Management PDFVirinchi NepalÎncă nu există evaluări
- Industrial Training ReportDocument22 paginiIndustrial Training ReportShashvat GuptaÎncă nu există evaluări
- News Paper Agency SystemDocument29 paginiNews Paper Agency Systemshrankhlasingh0% (1)
- Vini Internship ReportDocument37 paginiVini Internship ReportsakshamÎncă nu există evaluări
- A Project Report On: Submitted in Partial Fulfilment For The Award of The Degree ofDocument37 paginiA Project Report On: Submitted in Partial Fulfilment For The Award of The Degree ofpreetÎncă nu există evaluări
- Privacy Preserving Intermediate Datasets in The CloudDocument83 paginiPrivacy Preserving Intermediate Datasets in The CloudSuganya PeriasamyÎncă nu există evaluări
- Project ReportDocument69 paginiProject ReportJanardan BhattÎncă nu există evaluări
- Project Documentation Color DetectionDocument30 paginiProject Documentation Color DetectionMuhammad NomanÎncă nu există evaluări
- Module On Digitization-GREENSTONEDocument22 paginiModule On Digitization-GREENSTONEaidaÎncă nu există evaluări
- BluetoothDocument39 paginiBluetoothਗੁਰਪਰੀਤ ਸਿੰਘ ਸੂਰਾਪੁਰੀÎncă nu există evaluări
- ASP.NETDocument4 paginiASP.NETRizwan Ahmed100% (1)
- A Movie Recommender System: MOVREC: Manoj Kumar D.K. Yadav Ankur Singh Vijay Kr. GuptaDocument5 paginiA Movie Recommender System: MOVREC: Manoj Kumar D.K. Yadav Ankur Singh Vijay Kr. GuptaDeepak JainÎncă nu există evaluări
- Colour DetectionDocument6 paginiColour DetectionAR LAPÎncă nu există evaluări
- Machine LearningDocument17 paginiMachine Learningapi-488097590100% (1)
- Ecommerce ApplicationDocument20 paginiEcommerce ApplicationRahul PanditÎncă nu există evaluări
- Dotnet SyllabusDocument2 paginiDotnet SyllabusSumit TembhareÎncă nu există evaluări
- Optimizing Information Leakage in Multicloud Storage ServicesDocument14 paginiOptimizing Information Leakage in Multicloud Storage ServicesMohammad Bilal - Asst. Prof, Dept. of CSEÎncă nu există evaluări
- Disease Prediction Using Deep LearningDocument25 paginiDisease Prediction Using Deep LearningManoj KumarÎncă nu există evaluări
- Data Flow Diagram: Starting The ModuleDocument5 paginiData Flow Diagram: Starting The Modulehamed razaÎncă nu există evaluări
- Industrial Internship Final ReportDocument44 paginiIndustrial Internship Final ReportEshwarÎncă nu există evaluări
- Data Science and Big Data by IBM CE Allsoft Summer Training Final ReportDocument41 paginiData Science and Big Data by IBM CE Allsoft Summer Training Final Reportjohn pradeep100% (1)
- Social Networking: Project ReportDocument36 paginiSocial Networking: Project ReportragouÎncă nu există evaluări
- Data Mining and Business Intelligence FileDocument53 paginiData Mining and Business Intelligence FileARCHEEÎncă nu există evaluări
- Malware Detection and Prevention Using2Document55 paginiMalware Detection and Prevention Using2saikripa121Încă nu există evaluări
- What Is Difference Between Backtracking and Branch and Bound MethodDocument4 paginiWhat Is Difference Between Backtracking and Branch and Bound MethodMahi On D Rockzz67% (3)
- Python Generators: How To Create A Generator in Python?Document8 paginiPython Generators: How To Create A Generator in Python?Naga Pradeep VeerisettyÎncă nu există evaluări
- DBMS Mini Project Report (Review-1)Document25 paginiDBMS Mini Project Report (Review-1)daveyÎncă nu există evaluări
- Be It 2019 Lp-Vi (BCT)Document47 paginiBe It 2019 Lp-Vi (BCT)Aarti RathiÎncă nu există evaluări
- Final YouTube Automating Comment AnalysisDocument19 paginiFinal YouTube Automating Comment AnalysisAbdul RehmanÎncă nu există evaluări
- System Analysis and DesignDocument57 paginiSystem Analysis and DesignVictor M. MorcilloÎncă nu există evaluări
- Subject: Software Engineering and Project Management: Submitted byDocument10 paginiSubject: Software Engineering and Project Management: Submitted byPratik BhongadeÎncă nu există evaluări
- Java 3 Years Experience ResumeDocument3 paginiJava 3 Years Experience ResumeKishore MutcharlaÎncă nu există evaluări
- Final SynopsisDocument6 paginiFinal SynopsislokeshÎncă nu există evaluări
- Multi ProgrammingDocument6 paginiMulti ProgrammingAashish SharrmaÎncă nu există evaluări
- Icecream ParlorDocument83 paginiIcecream ParlorSujal ChawalaÎncă nu există evaluări
- Pramod Kumar N Prashant Pratima Sriharsha Sucheta S.S. Swati Suresh HegdeDocument52 paginiPramod Kumar N Prashant Pratima Sriharsha Sucheta S.S. Swati Suresh HegdePatrick Baretto100% (1)
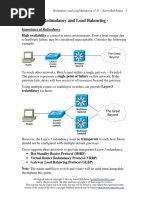
- Redundancy Load Balancing PDFDocument17 paginiRedundancy Load Balancing PDFMukesh SainiÎncă nu există evaluări
- Proctorial ReportDocument57 paginiProctorial Reportgopalankush100% (3)
- Railway Reservation SystemDocument53 paginiRailway Reservation SystemAmlesh KumarÎncă nu există evaluări
- Bhagwan Mahavir College OF Computer ApplicationDocument20 paginiBhagwan Mahavir College OF Computer Applicationpatel vivekÎncă nu există evaluări
- To Do App Using Flutter ReportDocument11 paginiTo Do App Using Flutter ReportSpoorthi KulkarniÎncă nu există evaluări
- Components. Add The Flex Grid ControlDocument5 paginiComponents. Add The Flex Grid ControlRMamacÎncă nu există evaluări
- What Is Data StructureDocument20 paginiWhat Is Data StructuregauravujjawalÎncă nu există evaluări
- OOP Project Proposal Library Management System.Document5 paginiOOP Project Proposal Library Management System.Zain AfzaalÎncă nu există evaluări
- Project ReportDocument69 paginiProject Reportmanikanta100% (1)
- Industry Oriented Training Synopsis ReportDocument23 paginiIndustry Oriented Training Synopsis Reportsanyam dhawan0% (1)
- Unit III-ITADocument11 paginiUnit III-ITArogithaÎncă nu există evaluări
- Final Mini ProjectDocument27 paginiFinal Mini Projectshamiruksha katarakiÎncă nu există evaluări
- Real Time Currency Converter Ijariie13241Document5 paginiReal Time Currency Converter Ijariie13241Pratik GunjkarÎncă nu există evaluări
- TranslatorDocument3 paginiTranslatorashishÎncă nu există evaluări
- DocDocument2 paginiDocKushal AgrawalÎncă nu există evaluări
- Accident Detection Using Mobile PhoneDocument4 paginiAccident Detection Using Mobile PhoneHrishikesh BasutkarÎncă nu există evaluări
- SRS For MP4 PlayerDocument6 paginiSRS For MP4 PlayerjoyÎncă nu există evaluări
- Content Based Image RetrievalDocument28 paginiContent Based Image Retrievalsuyogdjain86% (7)
- Ntambwekambuyi 2019Document10 paginiNtambwekambuyi 2019María Pía Arancibia BravoÎncă nu există evaluări
- Begginer's Python Cheat Sheet-DataquestDocument1 paginăBegginer's Python Cheat Sheet-DataquestUspiredes Bornicos100% (1)
- Bahan Reading Hydraulic PneumaticDocument6 paginiBahan Reading Hydraulic PneumaticAhmad HaritsÎncă nu există evaluări
- General Education Major Requirements: Web: HTTP://WWW - Ccsu.edu/page - CFM?P 6656Document2 paginiGeneral Education Major Requirements: Web: HTTP://WWW - Ccsu.edu/page - CFM?P 6656AndrewJariErickÎncă nu există evaluări
- Derivatives #3Document49 paginiDerivatives #3tolgonai2705Încă nu există evaluări
- (Biomedical Engineering) : BM: Biosciences and BioengineeringDocument22 pagini(Biomedical Engineering) : BM: Biosciences and BioengineeringDevasyaÎncă nu există evaluări
- Pemerintah Kabupaten Pamekasan Cabang Dinas Pendidikan Dan Kebudayaan Kecamatan GalisDocument2 paginiPemerintah Kabupaten Pamekasan Cabang Dinas Pendidikan Dan Kebudayaan Kecamatan GalisMuhamad AminÎncă nu există evaluări
- Chapter 1Document42 paginiChapter 1nislam57Încă nu există evaluări
- Maths in Focus, Margaret Grove - PrelimsDocument13 paginiMaths in Focus, Margaret Grove - PrelimsSam Scheding45% (11)
- Projek RC 1Document5 paginiProjek RC 1Hani BarjokÎncă nu există evaluări
- Google PDFDocument300 paginiGoogle PDFSupport TeamÎncă nu există evaluări
- Final 2013 2014Document14 paginiFinal 2013 2014allenÎncă nu există evaluări
- 5th MathsDocument6 pagini5th MathsMaricruz CuevasÎncă nu există evaluări
- Unit 2 Test StatsDocument2 paginiUnit 2 Test StatsSTEPHANIE LAZENBYÎncă nu există evaluări
- Q2 - W7 - 8 - Solving Systems of Linear EquationsDocument13 paginiQ2 - W7 - 8 - Solving Systems of Linear EquationsatÎncă nu există evaluări
- Pipe StackingDocument2 paginiPipe StackingUghojor ElohoÎncă nu există evaluări
- Graph TheoryDocument81 paginiGraph TheoryJohn TeranaÎncă nu există evaluări
- Validation of A Loading Model For Simulating Blast Mine Effects On Armoured VehiclesDocument10 paginiValidation of A Loading Model For Simulating Blast Mine Effects On Armoured VehiclesErik IslasÎncă nu există evaluări
- Standard Functions in PI 7.0 - Process Integration - Community WikiDocument34 paginiStandard Functions in PI 7.0 - Process Integration - Community Wikifziwen100% (1)
- Biometry Lecture 6 PostedDocument81 paginiBiometry Lecture 6 PostedS. MartinezÎncă nu există evaluări
- IEEE - A Tutorial Introduction To Estimation and Filtering PDFDocument19 paginiIEEE - A Tutorial Introduction To Estimation and Filtering PDFlndyaBhaiÎncă nu există evaluări
- Bits NozzlesDocument197 paginiBits Nozzlesiman100% (2)
- CIBSE Module 143 - Variable Air Volume (VAV) Air Conditioning Matures, Adapts and Flourishes - CIBSE JournalDocument13 paginiCIBSE Module 143 - Variable Air Volume (VAV) Air Conditioning Matures, Adapts and Flourishes - CIBSE JournalStephenBrammerÎncă nu există evaluări
- Syllabus Statistics&Methodology 2022 2023 Block3 Version1Document13 paginiSyllabus Statistics&Methodology 2022 2023 Block3 Version1luka yataÎncă nu există evaluări
- Excercise 15.10 12.6Document8 paginiExcercise 15.10 12.6Kogi JeyaÎncă nu există evaluări
- QuizDocument2 paginiQuizRepunzel RaajÎncă nu există evaluări
- Merits and Demerits of Arithemetic MeanDocument10 paginiMerits and Demerits of Arithemetic Meantarun86% (7)
- Abcl Manual 20120205aDocument52 paginiAbcl Manual 20120205aDMery ParedesÎncă nu există evaluări
- Moments 2Document1 paginăMoments 2Zaman Ali RajaÎncă nu există evaluări
- Stuff You MUST KNOW COLDDocument2 paginiStuff You MUST KNOW COLDNikki Nguyen NguyenÎncă nu există evaluări