S-ar putea să vă placă și
- Connection-Oriented Networks: SONET/SDH, ATM, MPLS and Optical NetworksDe la EverandConnection-Oriented Networks: SONET/SDH, ATM, MPLS and Optical NetworksÎncă nu există evaluări
- Slides - Chapter 6Document59 paginiSlides - Chapter 6Marimuthu MuthaiyanÎncă nu există evaluări
- Gain-Cell Embedded DRAMs for Low-Power VLSI Systems-on-ChipDe la EverandGain-Cell Embedded DRAMs for Low-Power VLSI Systems-on-ChipÎncă nu există evaluări
- 002 - Introduction To CUDA Programming - 1Document54 pagini002 - Introduction To CUDA Programming - 1Vinod VMÎncă nu există evaluări
- Cisco Packet Tracer Implementation: Building and Configuring Networks: 1, #1De la EverandCisco Packet Tracer Implementation: Building and Configuring Networks: 1, #1Încă nu există evaluări
- Summary Exam 2015Document30 paginiSummary Exam 2015ayylmao kekÎncă nu există evaluări
- ThreadsDocument54 paginiThreadsCosmic02Încă nu există evaluări
- Open-Source Robotics and Process Control Cookbook: Designing and Building Robust, Dependable Real-time SystemsDe la EverandOpen-Source Robotics and Process Control Cookbook: Designing and Building Robust, Dependable Real-time SystemsEvaluare: 3 din 5 stele3/5 (1)
- Matrix-Matrix Multiplication Using Shared MemoryDocument27 paginiMatrix-Matrix Multiplication Using Shared MemoryjhaumoshaÎncă nu există evaluări
- 217 Lec2Document24 pagini217 Lec2palashÎncă nu există evaluări
- VLSI Design for Video Coding: H.264/AVC Encoding from Standard Specification to ChipDe la EverandVLSI Design for Video Coding: H.264/AVC Encoding from Standard Specification to ChipÎncă nu există evaluări
- Gpu Cuda 2Document72 paginiGpu Cuda 2Joaquin FuentesÎncă nu există evaluări
- Node.js 63 Interview Questions and AnswersDe la EverandNode.js 63 Interview Questions and AnswersÎncă nu există evaluări
- Cuda 2Document43 paginiCuda 2proxymo1Încă nu există evaluări
- Design and Test Strategies for 2D/3D Integration for NoC-based Multicore ArchitecturesDe la EverandDesign and Test Strategies for 2D/3D Integration for NoC-based Multicore ArchitecturesÎncă nu există evaluări
- Lecture4 CUDA Threads Part2Document15 paginiLecture4 CUDA Threads Part2Cosmic02Încă nu există evaluări
- Introduction To Programming Massively Parallel Graphics ProcessorsDocument84 paginiIntroduction To Programming Massively Parallel Graphics ProcessorsdjriveÎncă nu există evaluări
- Practical Embedded Controllers: Design and Troubleshooting with the Motorola 68HC11De la EverandPractical Embedded Controllers: Design and Troubleshooting with the Motorola 68HC11Încă nu există evaluări
- Class4 Advanced Cuda OpenclDocument64 paginiClass4 Advanced Cuda OpenclCarlangaslangasÎncă nu există evaluări
- 8 Cud A 1Document38 pagini8 Cud A 1Aashish MittalÎncă nu există evaluări
- Computer Architecture and Security: Fundamentals of Designing Secure Computer SystemsDe la EverandComputer Architecture and Security: Fundamentals of Designing Secure Computer SystemsÎncă nu există evaluări
- Lecture 4Document48 paginiLecture 4raghunaathÎncă nu există evaluări
- GPU Programming: CUDADocument29 paginiGPU Programming: CUDAMilagros VegaÎncă nu există evaluări
- Multithreaded Architectures: Memory and Data LocalityDocument39 paginiMultithreaded Architectures: Memory and Data LocalityYAAKOV SOLOMONÎncă nu există evaluări
- GPGPU Programming With CUDA: Leandro Avila - University of Northern IowaDocument29 paginiGPGPU Programming With CUDA: Leandro Avila - University of Northern IowaXafran KhanÎncă nu există evaluări
- St. Thomas' College of Engineering and Technology: Laboratory Manual Computer Architecture PCC-CS492Document38 paginiSt. Thomas' College of Engineering and Technology: Laboratory Manual Computer Architecture PCC-CS492kalyan.dasÎncă nu există evaluări
- Gpu ProgrammingDocument96 paginiGpu ProgrammingJino Goju Stark100% (2)
- Module 3.1 - CUDA Parallelism Model: GPU Teaching KitDocument44 paginiModule 3.1 - CUDA Parallelism Model: GPU Teaching Kityassin mechbalÎncă nu există evaluări
- Josh CudaDocument27 paginiJosh CudaRamuÎncă nu există evaluări
- Comp422 2011 Lecture8 UPCDocument44 paginiComp422 2011 Lecture8 UPCaskbilladdmicrosoftÎncă nu există evaluări
- IC Pad Design.Document11 paginiIC Pad Design.vinayvpalekarÎncă nu există evaluări
- Innovus Study Notes-CSDN BlogDocument6 paginiInnovus Study Notes-CSDN BlogAgnathavasiÎncă nu există evaluări
- Intro 2 CudaDocument30 paginiIntro 2 Cudaab cÎncă nu există evaluări
- Lecture12 GPUArchCUDA02-CUDAMemDocument67 paginiLecture12 GPUArchCUDA02-CUDAMemMichelle SaverÎncă nu există evaluări
- 2.2. ThreadDocument12 pagini2.2. Threadtest you jerkÎncă nu există evaluări
- Threads: Tevfik KoşarDocument40 paginiThreads: Tevfik KoşarIjazKhanÎncă nu există evaluări
- MCSE Material Fast TrackDocument58 paginiMCSE Material Fast TrackavaunpÎncă nu există evaluări
- CUDA Programming: Johan Seland Johan - Seland@sintef - NoDocument76 paginiCUDA Programming: Johan Seland Johan - Seland@sintef - NoLilly CheerothaÎncă nu există evaluări
- DDRDocument9 paginiDDRnivinÎncă nu există evaluări
- CudaDocument44 paginiCudaavinash kumarÎncă nu există evaluări
- An Overview of General Purpose Graphics Processing Units: Marc Moreno MazaDocument18 paginiAn Overview of General Purpose Graphics Processing Units: Marc Moreno MazaAsHraf G. ElrawEiÎncă nu există evaluări
- Unit-3 MultithreadingDocument25 paginiUnit-3 MultithreadingnellutlaramyaÎncă nu există evaluări
- Lab 01Document4 paginiLab 01Charu Roopa VaradarajanÎncă nu există evaluări
- ABSTRACTDocument2 paginiABSTRACTSynapse ConsultancyÎncă nu există evaluări
- Asic N Fpga 2-MarksDocument21 paginiAsic N Fpga 2-MarkssowmyaÎncă nu există evaluări
- An Efficient VLSI Implementation of IDEA Encryption Algorithm Using VHDLDocument7 paginiAn Efficient VLSI Implementation of IDEA Encryption Algorithm Using VHDLManasa ChikkalaÎncă nu există evaluări
- Contemporary Device TreeDocument25 paginiContemporary Device TreeChairil AnwarÎncă nu există evaluări
- Lab Preparatory HWDocument5 paginiLab Preparatory HWabdullahÎncă nu există evaluări
- Gpu History and Cuda Programming BasicsDocument44 paginiGpu History and Cuda Programming BasicsFransiskus Yoga Esa WibowoÎncă nu există evaluări
- Final Exam System On Chip Solutions in Networking SS 2007Document10 paginiFinal Exam System On Chip Solutions in Networking SS 2007Bobby BeamanÎncă nu există evaluări
- CUDADocument33 paginiCUDAravish177Încă nu există evaluări
- Module 4.1 - Memory and Data Locality: GPU Teaching KitDocument132 paginiModule 4.1 - Memory and Data Locality: GPU Teaching KitAndy OrtizÎncă nu există evaluări
- Introduction To CUDA: CAP 4730 Spring 2012Document35 paginiIntroduction To CUDA: CAP 4730 Spring 2012Manvendra Singh ChhajerhÎncă nu există evaluări
- Mips Fpga LabDocument10 paginiMips Fpga LabBiloKhanÎncă nu există evaluări
- Icl Utk 1570 2022Document26 paginiIcl Utk 1570 2022taldayyeniÎncă nu există evaluări
- Mcse NotesDocument90 paginiMcse NotesAbhishek kapoor85% (13)
- Montmorillonite Molecular Dynamics PhosphateDocument1 paginăMontmorillonite Molecular Dynamics PhosphateRenato Quezada EÎncă nu există evaluări
- PolielectrolitosDocument8 paginiPolielectrolitosRenato Quezada EÎncă nu există evaluări
- Five Minute Guide To LatexDocument6 paginiFive Minute Guide To LatexΚΛΕΑΝΘΗΣ ΜΑΝΩΛΟΠΟΥΛΟΣÎncă nu există evaluări
- Introduction Polymer TheoryDocument43 paginiIntroduction Polymer TheoryRenato Quezada EÎncă nu există evaluări
- On Developing Coarse-Grained Models For Biomolecular Simulation A ReviewDocument8 paginiOn Developing Coarse-Grained Models For Biomolecular Simulation A ReviewRenato Quezada EÎncă nu există evaluări
- Generalized Born Implicit SolventDocument14 paginiGeneralized Born Implicit SolventRenato Quezada EÎncă nu există evaluări
- Thm14 - Parallel PrefixDocument23 paginiThm14 - Parallel Prefixash2love007Încă nu există evaluări
- Introduction To Monte Carlo AlgorithmsDocument43 paginiIntroduction To Monte Carlo AlgorithmsRenato Quezada EÎncă nu există evaluări
- Ewald Interactions and Finite-Size Errors PDFDocument36 paginiEwald Interactions and Finite-Size Errors PDFRenato Quezada EÎncă nu există evaluări
- Parallel Prefix SumDocument17 paginiParallel Prefix SumRenato Quezada EÎncă nu există evaluări
- Theory of The Stability of Lyophobic Colloids Verwey OverbeekDocument108 paginiTheory of The Stability of Lyophobic Colloids Verwey OverbeekRenato Quezada EÎncă nu există evaluări
- Kinetic MontecarloDocument28 paginiKinetic MontecarloRenato Quezada EÎncă nu există evaluări
- Ising Model Monte Carlo MethodsDocument17 paginiIsing Model Monte Carlo MethodsRenato Quezada EÎncă nu există evaluări
- Water As An Active Constituent in Cell BiologyDocument35 paginiWater As An Active Constituent in Cell BiologyRenato Quezada EÎncă nu există evaluări
- Simcol HorbachDocument118 paginiSimcol HorbachRenato Quezada EÎncă nu există evaluări
- Lecture11Document16 paginiLecture11Renato Quezada EÎncă nu există evaluări
- Lewmar Marine Equipment Guide Ed 14Document224 paginiLewmar Marine Equipment Guide Ed 14Renato Fonseca100% (1)
- Model Building Intermediate: Exercise GuideDocument64 paginiModel Building Intermediate: Exercise GuideDragos ZvincuÎncă nu există evaluări
- Datasheet Fuji F5018 F5020Document6 paginiDatasheet Fuji F5018 F5020StaryzgredÎncă nu există evaluări
- Contoh Ringkasan Mengajar Bahasa Inggeris Tahun 2 Dan 3Document2 paginiContoh Ringkasan Mengajar Bahasa Inggeris Tahun 2 Dan 3Izla MajidÎncă nu există evaluări
- After12th FinalDocument114 paginiAfter12th FinaltransendenceÎncă nu există evaluări
- Characterization and Application of Cerium Fluoride Film in InfraredDocument4 paginiCharacterization and Application of Cerium Fluoride Film in InfrarednguyenthanhhopÎncă nu există evaluări
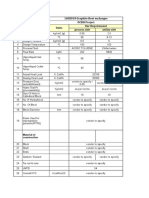
- 16HE018 Graphite Heat Exchanger DCBH Project Sr. No. Particulars Units Our Requirement Process Side Utility SideDocument2 pagini16HE018 Graphite Heat Exchanger DCBH Project Sr. No. Particulars Units Our Requirement Process Side Utility SideBhaumik BhuvaÎncă nu există evaluări
- TM - A5ck, CC, CM - y PDFDocument102 paginiTM - A5ck, CC, CM - y PDFslipargolokÎncă nu există evaluări
- UbnfilelDocument3 paginiUbnfilelJorge LorenzoÎncă nu există evaluări
- Diff BW CBO and RBODocument2 paginiDiff BW CBO and RBORamreddy BollaÎncă nu există evaluări
- PowerMaxExpress V17 Eng User Guide D-303974 PDFDocument38 paginiPowerMaxExpress V17 Eng User Guide D-303974 PDFSretenÎncă nu există evaluări
- Etic HackDocument31 paginiEtic HackJOrdi CrespoÎncă nu există evaluări
- E TDS ManualDocument30 paginiE TDS ManualJeetendra ShresthaÎncă nu există evaluări
- Ar10 Jig Instructions PDFDocument5 paginiAr10 Jig Instructions PDFterrencebelles100% (2)
- Algorithmic Versus Human AdviceDocument31 paginiAlgorithmic Versus Human AdviceDaqiang ChenÎncă nu există evaluări
- Manual ArchicadDocument67 paginiManual ArchicadkhajaimadÎncă nu există evaluări
- SCDL - PGDBA - Finance - Sem 2 - Strategic ManagementDocument20 paginiSCDL - PGDBA - Finance - Sem 2 - Strategic Managementapi-3762419100% (2)
- TDSC Tpus420 enDocument23 paginiTDSC Tpus420 encatalind_cdÎncă nu există evaluări
- Pressure Sensors - Nautilus: For Control Circuits, Type XML-F PresentationDocument11 paginiPressure Sensors - Nautilus: For Control Circuits, Type XML-F PresentationxzxÎncă nu există evaluări
- BHTM445 Syllabus MW - Spring 2015-2016Document6 paginiBHTM445 Syllabus MW - Spring 2015-2016dangerousbabyÎncă nu există evaluări
- Time Impact Analysis by BrewerConsultingDocument3 paginiTime Impact Analysis by BrewerConsultingAAKÎncă nu există evaluări
- Session 2A JonkerDocument15 paginiSession 2A JonkerD_D_AÎncă nu există evaluări
- Cabezas de Rotulas-RotulasDocument64 paginiCabezas de Rotulas-RotulasFRANCISCO100% (1)
- Factors Affecting Beam StrengthDocument2 paginiFactors Affecting Beam StrengthkalpanaadhiÎncă nu există evaluări
- A6Document67 paginiA6Ashraff AudiÎncă nu există evaluări
- HILTI Typical Plumbing ApplicationsDocument140 paginiHILTI Typical Plumbing ApplicationskuraimundÎncă nu există evaluări
- Work OverDocument3 paginiWork OverDaniil GhilescuÎncă nu există evaluări
- Unit Standards and Competencies Diagram: Performance StandardDocument11 paginiUnit Standards and Competencies Diagram: Performance Standarddanica baguiÎncă nu există evaluări
- Oscilloscope Lab Manual11Document16 paginiOscilloscope Lab Manual11DM RafiunÎncă nu există evaluări
- LiquidlevelDocument24 paginiLiquidlevelAnu Raj Anu RajÎncă nu există evaluări