S-ar putea să vă placă și
- Introduction to Hybrid Vehicle System Modeling and ControlDe la EverandIntroduction to Hybrid Vehicle System Modeling and ControlEvaluare: 4 din 5 stele4/5 (1)
- Iec61375 1 TCNDocument54 paginiIec61375 1 TCNreza11998868Încă nu există evaluări
- Ai 350 MVBDocument72 paginiAi 350 MVBAdhitya Surya PambudiÎncă nu există evaluări
- EKE Trainnet BrochureDocument61 paginiEKE Trainnet BrochureCristian Alberto Oyarzo CalistoÎncă nu există evaluări
- RDSO DTCN Ver-2Document23 paginiRDSO DTCN Ver-2Akhilesh MisraÎncă nu există evaluări
- Fundamentals of MCUs Session 1Document31 paginiFundamentals of MCUs Session 1VIJAYPUTRAÎncă nu există evaluări
- Power Line CommunicationDocument62 paginiPower Line CommunicationPantech ProLabs India Pvt LtdÎncă nu există evaluări
- TCT 5 PDFDocument105 paginiTCT 5 PDFnaveen_1507Încă nu există evaluări
- Automotive Radar Performance CharacteristicsDocument26 paginiAutomotive Radar Performance CharacteristicsChristophe GreffeÎncă nu există evaluări
- PWM Based DC Motor Speed Control Using MicrocontrollerDocument8 paginiPWM Based DC Motor Speed Control Using MicrocontrollertazebÎncă nu există evaluări
- Enhancing Embedded Systems Simulation A Chip Hardware in The Loop FrameworkDocument247 paginiEnhancing Embedded Systems Simulation A Chip Hardware in The Loop FrameworkHECTOR H SANCHEZÎncă nu există evaluări
- UL 1564 SUN Rev 8 25 2020 ED 8 25 2022Document3 paginiUL 1564 SUN Rev 8 25 2020 ED 8 25 2022Joshua JonesÎncă nu există evaluări
- IPMI Errata and Clarifications Intelligent Platform Management Interface Specification v1.0, Revision 1.1Document12 paginiIPMI Errata and Clarifications Intelligent Platform Management Interface Specification v1.0, Revision 1.1alexchuahÎncă nu există evaluări
- FRS Remote DiagnosticDocument30 paginiFRS Remote Diagnosticvikas katiyarÎncă nu există evaluări
- Railway EMC Standards PrEN 50121 XDocument7 paginiRailway EMC Standards PrEN 50121 XMvh PrasadÎncă nu există evaluări
- Interlocking Part 2 by Francis How - Back To BasicsDocument6 paginiInterlocking Part 2 by Francis How - Back To BasicsShashi Bhusan SinghÎncă nu există evaluări
- Irs S 99-2006, Data Logger SystemDocument63 paginiIrs S 99-2006, Data Logger SystemGirdhar SrivastavaÎncă nu există evaluări
- Basic Electrical and Electronics Engineering (EEE1001Document2 paginiBasic Electrical and Electronics Engineering (EEE1001bhavay 07100% (1)
- Radar Presentation From FreescaleDocument34 paginiRadar Presentation From FreescaleGuang ChenÎncă nu există evaluări
- Train Detection, The Basics by Paul Darlington and David Fenner - Back To Basics PDFDocument8 paginiTrain Detection, The Basics by Paul Darlington and David Fenner - Back To Basics PDFShashi Bhusan SinghÎncă nu există evaluări
- Autosar Sws DiagnosticoveripDocument127 paginiAutosar Sws DiagnosticoveripStefan RuscanuÎncă nu există evaluări
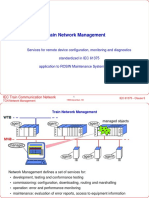
- Iec61375 5 TNMDocument27 paginiIec61375 5 TNMVaibhav DhinganiÎncă nu există evaluări
- A REVIEW ON LDO PASS ELEMENTSDocument5 paginiA REVIEW ON LDO PASS ELEMENTSChristina ReyesÎncă nu există evaluări
- Railway StandardsDocument7 paginiRailway StandardsMahmoud Salah Mohamed ElzeinÎncă nu există evaluări
- Topic 10 - Thermal Design Consideration For Surface Mount Layouts PDFDocument16 paginiTopic 10 - Thermal Design Consideration For Surface Mount Layouts PDFManu MathewÎncă nu există evaluări
- Decoding LoRaDocument8 paginiDecoding LoRaflorent_marcelliÎncă nu există evaluări
- Microprocessors in Railway SignalingDocument9 paginiMicroprocessors in Railway SignalingNECDET ÇİLİNGİRÎncă nu există evaluări
- VRLA Tech ManualDocument24 paginiVRLA Tech Manualrodolfoordiguez_70Încă nu există evaluări
- Axel Counter Summer Training ReportDocument81 paginiAxel Counter Summer Training ReportMitil VarshneyÎncă nu există evaluări
- Using Simulink in Engine Model PDFDocument77 paginiUsing Simulink in Engine Model PDFVo Quoc DatÎncă nu există evaluări
- 1.2 IRSE Conv 2013 Swedish Rail - Per OlofssonDocument35 pagini1.2 IRSE Conv 2013 Swedish Rail - Per OlofssonShashi Bhusan SinghÎncă nu există evaluări
- ERTMS Test Results ItalyDocument15 paginiERTMS Test Results ItalyangnavaÎncă nu există evaluări
- HomePlug Green PHYDocument16 paginiHomePlug Green PHYYangsoo ParkÎncă nu există evaluări
- Implementation of A Complete GPS Receiver Using SimulinkDocument9 paginiImplementation of A Complete GPS Receiver Using SimulinkvwnunlaiÎncă nu există evaluări
- Hu, Fei - Vehicle-To-Vehicle and Vehicle-To-Infrastructure Communications - A Technical Approach-Taylor & Francis - CRC Press (2018)Document363 paginiHu, Fei - Vehicle-To-Vehicle and Vehicle-To-Infrastructure Communications - A Technical Approach-Taylor & Francis - CRC Press (2018)Javier IzquierdoÎncă nu există evaluări
- BS 376-1 2012Document38 paginiBS 376-1 2012Prakash Kumar100% (1)
- Simulink-Targetlink Datatypes Defnt ProblemDocument16 paginiSimulink-Targetlink Datatypes Defnt ProblemmonisivaÎncă nu există evaluări
- Implementing The CANopen Protocol in A Multiple Node System in The BioBike For Motor Position ControlDocument7 paginiImplementing The CANopen Protocol in A Multiple Node System in The BioBike For Motor Position ControlVedant PrustyÎncă nu există evaluări
- RDSO Specification for 500 Amp Inter Vehicular CouplerDocument19 paginiRDSO Specification for 500 Amp Inter Vehicular CouplerRajnish KumarÎncă nu există evaluări
- 121114.001 - Specification For - TCN - VCU - Website PDFDocument32 pagini121114.001 - Specification For - TCN - VCU - Website PDFDinesh MehtaÎncă nu există evaluări
- Digital Axle Counter PDFDocument115 paginiDigital Axle Counter PDFKavin adithyanÎncă nu există evaluări
- Emc Design Fundamentals PDFDocument70 paginiEmc Design Fundamentals PDFmrameshmeÎncă nu există evaluări
- BT MITRAC Train Control and Management System Bro enDocument5 paginiBT MITRAC Train Control and Management System Bro enSudeepÎncă nu există evaluări
- High Speed Fuses Applications GuideDocument53 paginiHigh Speed Fuses Applications GuideImanol López GoitiÎncă nu există evaluări
- CV Resume NaderJSA En03 PDFDocument3 paginiCV Resume NaderJSA En03 PDFazitaggÎncă nu există evaluări
- Ansi-Cea709 (En14908)Document36 paginiAnsi-Cea709 (En14908)2q3w4e5r6tÎncă nu există evaluări
- CBTC System Presentation Highlights Automated Rail FeaturesDocument111 paginiCBTC System Presentation Highlights Automated Rail FeaturesRamesh Sharma100% (1)
- KUMARAGURU COLLEGE OF TECHNOLOGY REGULATIONS 2018 M.E. (Power Electronics and DrivesDocument50 paginiKUMARAGURU COLLEGE OF TECHNOLOGY REGULATIONS 2018 M.E. (Power Electronics and DrivesSenthilnathan ArumugamÎncă nu există evaluări
- Solid State InterlockingDocument19 paginiSolid State InterlockingAnil BainsÎncă nu există evaluări
- Advantages of Valve Regulated Lead Acid (VRLA) BatteriesDocument1 paginăAdvantages of Valve Regulated Lead Acid (VRLA) BatteriessuhailfarhaanÎncă nu există evaluări
- Introductory Handbook On CBTCDocument88 paginiIntroductory Handbook On CBTCBibek SinghÎncă nu există evaluări
- Marco Di Natale, Haibo Zeng, Paolo Giusto, Arkadeb Ghosal (Auth.) - Understanding and Using The Controller Area Network Communication Protocol - Theory and Practice-Springer-Verlag New York (2012) PDFDocument242 paginiMarco Di Natale, Haibo Zeng, Paolo Giusto, Arkadeb Ghosal (Auth.) - Understanding and Using The Controller Area Network Communication Protocol - Theory and Practice-Springer-Verlag New York (2012) PDFFranklim TelesÎncă nu există evaluări
- CAN Bus - The Ultimate GuideDocument114 paginiCAN Bus - The Ultimate GuideNivas Reddy100% (1)
- Advanced Driver Assistance Systems (ADAS) Standard RequirementsDe la EverandAdvanced Driver Assistance Systems (ADAS) Standard RequirementsÎncă nu există evaluări
- iHorizon-Enabled Energy Management for Electrified VehiclesDe la EverandiHorizon-Enabled Energy Management for Electrified VehiclesÎncă nu există evaluări
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlDe la EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlEvaluare: 5 din 5 stele5/5 (1)
- Introduction to Electromagnetic CompatibilityDe la EverandIntroduction to Electromagnetic CompatibilityEvaluare: 3 din 5 stele3/5 (2)
- Automotive Software Engineering: Principles, Processes, Methods, and ToolsDocument7 paginiAutomotive Software Engineering: Principles, Processes, Methods, and ToolsPhogat AshishÎncă nu există evaluări
- UART Communication Protocol - How It Works - Codrey ElectronicsDocument14 paginiUART Communication Protocol - How It Works - Codrey ElectronicsPhogat Ashish100% (1)
- Software Testing ToolsDocument79 paginiSoftware Testing ToolsPrabu DevaÎncă nu există evaluări
- Unit 3tablesanddatastructures 110608060840 Phpapp02Document70 paginiUnit 3tablesanddatastructures 110608060840 Phpapp02Phogat AshishÎncă nu există evaluări
- Kvaser CAN Protocol Tutorial PDFDocument28 paginiKvaser CAN Protocol Tutorial PDFPhogat AshishÎncă nu există evaluări
- Advanced CDocument3 paginiAdvanced CPhogat AshishÎncă nu există evaluări
- Software Testing ToolsDocument79 paginiSoftware Testing ToolsPrabu DevaÎncă nu există evaluări
- Kvaser CAN Protocol TutorialDocument3 paginiKvaser CAN Protocol TutorialPhogat AshishÎncă nu există evaluări
- CAN Vs EthernetDocument28 paginiCAN Vs EthernetPhogat AshishÎncă nu există evaluări
- BrochureDocument12 paginiBrochurePhogat AshishÎncă nu există evaluări
- Advance Training On ARM 32 Bit Cortex M3: Ualities OF NstituteDocument2 paginiAdvance Training On ARM 32 Bit Cortex M3: Ualities OF NstitutePhogat AshishÎncă nu există evaluări
- Mdu FormDocument6 paginiMdu FormshashikantgaurÎncă nu există evaluări
- Uclinux Dist+Compiled+ImagesDocument5 paginiUclinux Dist+Compiled+ImagesPhogat AshishÎncă nu există evaluări
- Type of Proofs To Submit (FY-2012-13)Document8 paginiType of Proofs To Submit (FY-2012-13)Phogat AshishÎncă nu există evaluări
- SAP Developer ProfileDocument1 paginăSAP Developer ProfilePhogat AshishÎncă nu există evaluări
- Unix Haters HandbookDocument360 paginiUnix Haters Handbookfredx10Încă nu există evaluări
- PIC16 F 690Document294 paginiPIC16 F 690Nayeli MondragónÎncă nu există evaluări
- Unix Haters HandbookDocument360 paginiUnix Haters Handbookfredx10Încă nu există evaluări
- Embedded - Real Time Systems NotesDocument20 paginiEmbedded - Real Time Systems Notesc nikhil chand kashyapÎncă nu există evaluări
- Picc Lite ManualDocument366 paginiPicc Lite Manualtanny_03Încă nu există evaluări
- PIC Lite ManualDocument13 paginiPIC Lite ManualPhogat Ashish100% (1)
- Pic18 Serial CommunicationDocument25 paginiPic18 Serial Communicationadamwaiz100% (3)
- Embedded - Real Time Systems NotesDocument20 paginiEmbedded - Real Time Systems Notesc nikhil chand kashyapÎncă nu există evaluări
- Fares How To Ride A Bus: Monday Through Friday Monday Through FridayDocument2 paginiFares How To Ride A Bus: Monday Through Friday Monday Through FridayPhogat AshishÎncă nu există evaluări
- Pic18 Serial CommunicationDocument25 paginiPic18 Serial Communicationadamwaiz100% (3)
- PIC16 F 690Document294 paginiPIC16 F 690Nayeli MondragónÎncă nu există evaluări
- Fares How To Ride A Bus: Monday Through Friday Monday Through FridayDocument2 paginiFares How To Ride A Bus: Monday Through Friday Monday Through FridayPhogat AshishÎncă nu există evaluări
- Picc Lite ManualDocument366 paginiPicc Lite Manualtanny_03Încă nu există evaluări
- Ebook - C Programming 4 Embedded Systems - Kirk ZurellDocument191 paginiEbook - C Programming 4 Embedded Systems - Kirk Zurellmanojiitd2363100% (1)
- Migration Path: From TC1767 To TC1782Document19 paginiMigration Path: From TC1767 To TC1782Alexandre KaczanukÎncă nu există evaluări
- 725 AND 730 Articulated Trucks: Maintenance IntervalsDocument61 pagini725 AND 730 Articulated Trucks: Maintenance IntervalsJayantha parakrama Thennakoon100% (1)
- 570st - Tractor Loader Backhoe (08/16 - ) 84 - Booms, Dippers & Buckets 84.114.af (04) - Swing Cylinders Sub AssyDocument3 pagini570st - Tractor Loader Backhoe (08/16 - ) 84 - Booms, Dippers & Buckets 84.114.af (04) - Swing Cylinders Sub AssyСтаниславÎncă nu există evaluări
- LM2695 High Voltage (30V, 1.25A) Step Down Switching RegulatorDocument14 paginiLM2695 High Voltage (30V, 1.25A) Step Down Switching RegulatorYoyok CahyonoÎncă nu există evaluări
- KD 65 X 8000 CDocument98 paginiKD 65 X 8000 CkalleÎncă nu există evaluări
- Inspection Rigging EquipmentDocument1 paginăInspection Rigging Equipmentwahyu haryadiÎncă nu există evaluări
- Linde 1.1 - Manual - Charging With External Power Supply PDFDocument1 paginăLinde 1.1 - Manual - Charging With External Power Supply PDFAlvaro PradaÎncă nu există evaluări
- ZF TERRAPOWER TPT 20 transmission overviewDocument2 paginiZF TERRAPOWER TPT 20 transmission overviewMiguelÎncă nu există evaluări
- 1 1 1 A B SimplemachinesinclinedplanewedgescrewDocument19 pagini1 1 1 A B Simplemachinesinclinedplanewedgescrewapi-366546603Încă nu există evaluări
- Powerscreen Premiertrak 300 Features & BenefitsDocument3 paginiPowerscreen Premiertrak 300 Features & BenefitsLuis Paladines BravoÎncă nu există evaluări
- Forklift Pre-Use ChecklistDocument2 paginiForklift Pre-Use ChecklistJuan de la CruzÎncă nu există evaluări
- 9 Power TrainDocument146 pagini9 Power TraineduamaÎncă nu există evaluări
- Field Wireable Connectors: Features and Selection GuidesDocument7 paginiField Wireable Connectors: Features and Selection GuidesCarloss Ruiz RÎncă nu există evaluări
- WEG Power Transformers Usaptx13 Brochure EnglishDocument8 paginiWEG Power Transformers Usaptx13 Brochure EnglishsalehÎncă nu există evaluări
- 502 Series DC Power System: Netsure™Document8 pagini502 Series DC Power System: Netsure™Sahand ArasÎncă nu există evaluări
- Mitsubishi Lancer Evo IX.Document2.666 paginiMitsubishi Lancer Evo IX.seregap84Încă nu există evaluări
- CNG EquipmentDocument40 paginiCNG EquipmentAkhil AkhiÎncă nu există evaluări
- Horizontal Pre-Piped Bladder Tanks With Proportioner: FeaturesDocument6 paginiHorizontal Pre-Piped Bladder Tanks With Proportioner: FeaturesRafael RodríguezÎncă nu există evaluări
- Suspension Section ForcesDocument21 paginiSuspension Section ForcesIndranil BhattacharyyaÎncă nu există evaluări
- Wiring Headlight RelaysDocument20 paginiWiring Headlight RelaysFloris van EnterÎncă nu există evaluări
- Financial Proposal For IP System DAHUADocument3 paginiFinancial Proposal For IP System DAHUAMjafar Ishaq100% (2)
- Wiring Diagram of Universal MotorDocument10 paginiWiring Diagram of Universal MotorYunus SiregarÎncă nu există evaluări
- Terminations: Underground Electric Distribution StandardsDocument20 paginiTerminations: Underground Electric Distribution StandardsHendrix LevaÎncă nu există evaluări
- Air Cadet Pumps ManualDocument12 paginiAir Cadet Pumps ManualEdgar Campusano SanchezÎncă nu există evaluări
- Presentation 2Document20 paginiPresentation 2preferredcustomerÎncă nu există evaluări
- Tata Indigo Marina Diesel ManualDocument146 paginiTata Indigo Marina Diesel Manualxtemp100% (4)
- Cabin ModuleDocument75 paginiCabin ModuleESRAÎncă nu există evaluări
- Airworthiness Directive Schedule: Helicopters Bell 47 Series & Kawasaki Bell 47 Series 25 June 2009Document12 paginiAirworthiness Directive Schedule: Helicopters Bell 47 Series & Kawasaki Bell 47 Series 25 June 2009Cristian PugaÎncă nu există evaluări
- Datasheet PDFDocument5 paginiDatasheet PDFFIMÎncă nu există evaluări
- P Series Strain GaugesDocument1 paginăP Series Strain Gaugesjbmune6683Încă nu există evaluări