S-ar putea să vă placă și
- Coherent Wireless Power Charging and Data Transfer for Electric VehiclesDe la EverandCoherent Wireless Power Charging and Data Transfer for Electric VehiclesÎncă nu există evaluări
- Encoder Basics TrainingDocument41 paginiEncoder Basics TrainingZyzerull Saad100% (1)
- Networked Control System: Fundamentals and ApplicationsDe la EverandNetworked Control System: Fundamentals and ApplicationsÎncă nu există evaluări
- Y209 EN2 04+PanelBuilderGuide2016Document372 paginiY209 EN2 04+PanelBuilderGuide2016Minuraj100% (1)
- Control of A Four-Level Elevator System Using A PLCDocument8 paginiControl of A Four-Level Elevator System Using A PLCminhko90100% (3)
- Induction Motor DrivesDocument70 paginiInduction Motor DrivesAshwin Gopinath80% (5)
- Frenic LiftDocument8 paginiFrenic LiftĐộc Thiên ThanhÎncă nu există evaluări
- Star-Delta motor starter guideDocument12 paginiStar-Delta motor starter guideCharles NunezÎncă nu există evaluări
- How To Upload Program From Cpu Using Simatic Manager - PLC BasicsDocument11 paginiHow To Upload Program From Cpu Using Simatic Manager - PLC BasicsMohamed Elsayed100% (1)
- OPC AutomationDocument18 paginiOPC AutomationAdimas YudistiraÎncă nu există evaluări
- Fault List PDFDocument2.750 paginiFault List PDFAristóteles Terceiro NetoÎncă nu există evaluări
- SIMOCRANE Basic Technology 2012-06 en en-US PDFDocument532 paginiSIMOCRANE Basic Technology 2012-06 en en-US PDFRafaelÎncă nu există evaluări
- Tuning of A PID Controller Using Ziegler-Nichols MethodDocument7 paginiTuning of A PID Controller Using Ziegler-Nichols MethodTomKish100% (1)
- Simatic St70 Complete English 2023Document1.692 paginiSimatic St70 Complete English 2023shamsur rahman opuÎncă nu există evaluări
- Power Scada SchneiderDocument18 paginiPower Scada SchneiderMarwa Ismail KamelÎncă nu există evaluări
- Wago LinuxDocument248 paginiWago LinuxBOsy Ying LoÎncă nu există evaluări
- STEP 7 - Programming With STEP 7Document650 paginiSTEP 7 - Programming With STEP 7raveekornov100% (8)
- Incremental vs Absolute Encoders: Which is Best for Your ApplicationDocument5 paginiIncremental vs Absolute Encoders: Which is Best for Your ApplicationAndari Dian AriestianiÎncă nu există evaluări
- The Application of Variable Frequency Drive As An Efficient Control Element in Cement IndustryDocument7 paginiThe Application of Variable Frequency Drive As An Efficient Control Element in Cement IndustryНемања Катић100% (1)
- s7 1500Document8 paginis7 1500jota_hhÎncă nu există evaluări
- Introduction to Vision SystemsDocument27 paginiIntroduction to Vision Systemsjul100% (1)
- Masterk Instructions ProgrammingDocument268 paginiMasterk Instructions Programmingmkspenang183055% (11)
- SoMachine Basic - Schnieder PLC ProgramingDocument254 paginiSoMachine Basic - Schnieder PLC ProgramingCristi CalotaÎncă nu există evaluări
- Module 2 - DC Motor DrivesDocument61 paginiModule 2 - DC Motor DrivesMohammad Amirul ShafiqÎncă nu există evaluări
- IOT Protocols and Overview (SSI)Document29 paginiIOT Protocols and Overview (SSI)Strategic Systems InternationalÎncă nu există evaluări
- What is a VFD? Understanding Variable Frequency DrivesDocument4 paginiWhat is a VFD? Understanding Variable Frequency Driveschandrakanth100% (2)
- PLC and Scada Training Course ContentDocument4 paginiPLC and Scada Training Course ContentAmitÎncă nu există evaluări
- HMI - WinCC FlexibleDocument1 paginăHMI - WinCC FlexiblepfalencarÎncă nu există evaluări
- Training Manual EN PDFDocument140 paginiTraining Manual EN PDFFabio SplendorÎncă nu există evaluări
- YASKAWA AC Drive A1000: Quick Start GuideDocument44 paginiYASKAWA AC Drive A1000: Quick Start GuideSami VehmasÎncă nu există evaluări
- E P e C Machine ControllerDocument92 paginiE P e C Machine Controllerkishan1234Încă nu există evaluări
- How To Connect Profibus Cable To Socket?Document3 paginiHow To Connect Profibus Cable To Socket?duniaengineering8666100% (3)
- Acs 1000Document16 paginiAcs 1000Daniel Rodrigo Olivares MesiasÎncă nu există evaluări
- Electro-Mechanical Elements of Lift TechnologyDocument28 paginiElectro-Mechanical Elements of Lift TechnologyFiorella Amer CarrÎncă nu există evaluări
- Elevator Control SystemDocument15 paginiElevator Control SystemAdityaGupta100% (1)
- Electrical Network Monitoring & Control Solution: Avoiding Blackouts in Industrial Plants!Document14 paginiElectrical Network Monitoring & Control Solution: Avoiding Blackouts in Industrial Plants!Sandesh ChoudhariÎncă nu există evaluări
- Can Bus Troubleshooting Rev BDocument4 paginiCan Bus Troubleshooting Rev Bjoendry100% (1)
- ProfiBus PADocument44 paginiProfiBus PAVarun KumarÎncă nu există evaluări
- Chapter 1 NotesDocument3 paginiChapter 1 Noteshero_spaceboy3600Încă nu există evaluări
- SEW Encoder Systems (Old) - 09196412Document44 paginiSEW Encoder Systems (Old) - 09196412Helder Cerqueira Gonzalez100% (1)
- Modbus TCP TrainingDocument45 paginiModbus TCP TrainingVishnu Lal100% (1)
- CAN Troubleshooting Sheet v3Document1 paginăCAN Troubleshooting Sheet v3Velina MilevaÎncă nu există evaluări
- VFD and HydraulicsDocument7 paginiVFD and Hydraulicsjameschall1Încă nu există evaluări
- LIN TrainingDocument46 paginiLIN TrainingThiago DomingosÎncă nu există evaluări
- Safety Relay TrainingDocument22 paginiSafety Relay TrainingJShearer94% (16)
- Siemens Simatic S 7 300 - 400 - Function Block Diagram For S7-300 and S7-400Document254 paginiSiemens Simatic S 7 300 - 400 - Function Block Diagram For S7-300 and S7-400duniaengineering8666100% (13)
- Vacon NX Inverter Manual FI9 FI14Document101 paginiVacon NX Inverter Manual FI9 FI14Gilberto PootÎncă nu există evaluări
- Simply ModbusDocument5 paginiSimply Modbuskanna22sg100% (1)
- Simatic S7-300Document29 paginiSimatic S7-300datopcompÎncă nu există evaluări
- Tutorial EncoderDocument3 paginiTutorial EncoderbequeÎncă nu există evaluări
- Calog ManualDocument34 paginiCalog Manualpatitay036817Încă nu există evaluări
- wp-2000: Key Considerations For Selecting Digital Encoder OutputsDocument3 paginiwp-2000: Key Considerations For Selecting Digital Encoder Outputsrmorenodx4587Încă nu există evaluări
- Control Theory 31 PDFDocument44 paginiControl Theory 31 PDFAmit TiwaryÎncă nu există evaluări
- B106 Rotary Encoder ManualDocument10 paginiB106 Rotary Encoder ManualTan Chin LuhÎncă nu există evaluări
- Computerized Wireless Pick N Place RobotDocument8 paginiComputerized Wireless Pick N Place RobotbhushansivaprasadÎncă nu există evaluări
- Encoders For Brushless Motor Commutation HEIDENHAINDocument3 paginiEncoders For Brushless Motor Commutation HEIDENHAINCristopher EntenaÎncă nu există evaluări
- Ch06 Hardware Components For Automation 14-210317Document38 paginiCh06 Hardware Components For Automation 14-210317MONICA YUNITA ,100% (2)
- ASDA-B2 Anual PDFDocument311 paginiASDA-B2 Anual PDFALEXANDRU ZANOAGAÎncă nu există evaluări
- UHF RFID Reader Plus Protocol Application Example V1 3 - ENDocument14 paginiUHF RFID Reader Plus Protocol Application Example V1 3 - ENArvind KumarÎncă nu există evaluări
- DG Synchronizing PanelDocument33 paginiDG Synchronizing PanelArvind KumarÎncă nu există evaluări
- EnMS Worksheet for Corrective & Preventive Action RequestsDocument1 paginăEnMS Worksheet for Corrective & Preventive Action RequestsArvind KumarÎncă nu există evaluări
- ASDA-B2 Anual PDFDocument311 paginiASDA-B2 Anual PDFALEXANDRU ZANOAGAÎncă nu există evaluări
- HMI Template en PDFDocument37 paginiHMI Template en PDFCao Minh ToànÎncă nu există evaluări
- InvoiceDocument1 paginăInvoiceArvind KumarÎncă nu există evaluări
- HMI Template en PDFDocument37 paginiHMI Template en PDFCao Minh ToànÎncă nu există evaluări
- 12Document34 pagini12Rafael GagoÎncă nu există evaluări
- Exceutive Meet PresentationDocument21 paginiExceutive Meet PresentationArvind KumarÎncă nu există evaluări
- 12Document34 pagini12Rafael GagoÎncă nu există evaluări
- InvoiceDocument1 paginăInvoiceArvind KumarÎncă nu există evaluări
- Proposal For Mpet Winding Machine-OEE CalculationDocument3 paginiProposal For Mpet Winding Machine-OEE CalculationArvind KumarÎncă nu există evaluări
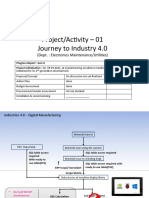
- Project/Activity - 01 Journey To Industry 4.0: (Dept.: Electronics Maintenance/Utilities)Document21 paginiProject/Activity - 01 Journey To Industry 4.0: (Dept.: Electronics Maintenance/Utilities)Arvind KumarÎncă nu există evaluări
- Energy Council Reviews Utility Consumption and Savings ProjectsDocument14 paginiEnergy Council Reviews Utility Consumption and Savings ProjectsArvind KumarÎncă nu există evaluări
- Project/Activity - 01 Journey To Industry 4.0: (Dept.: Electronics Maintenance/Utilities)Document21 paginiProject/Activity - 01 Journey To Industry 4.0: (Dept.: Electronics Maintenance/Utilities)Arvind KumarÎncă nu există evaluări
- CX Server RuntimeDocument91 paginiCX Server RuntimeArvind KumarÎncă nu există evaluări
- Allen Bradley PLC Input/Output Chart for DG Automation ProjectDocument17 paginiAllen Bradley PLC Input/Output Chart for DG Automation ProjectArvind KumarÎncă nu există evaluări
- Predialysis Education PresentationDocument99 paginiPredialysis Education PresentationArvind KumarÎncă nu există evaluări
- Technical Specifications: Enviropol Engineers Pvt. LTDDocument17 paginiTechnical Specifications: Enviropol Engineers Pvt. LTDArvind KumarÎncă nu există evaluări
- Manual JX PDFDocument263 paginiManual JX PDFArvind KumarÎncă nu există evaluări
- Easy Start Guide LS IC5Document15 paginiEasy Start Guide LS IC5Arvind KumarÎncă nu există evaluări
- Index 01Document1 paginăIndex 01Arvind KumarÎncă nu există evaluări
- Acs 1Document2 paginiAcs 1Arvind KumarÎncă nu există evaluări
- Introduction To Factorytalk View Software Tool.: LaboratoryDocument24 paginiIntroduction To Factorytalk View Software Tool.: LaboratoryArvind KumarÎncă nu există evaluări
- New Microsoft PowerPoinPLC PRESENTATIONt PresentationDocument16 paginiNew Microsoft PowerPoinPLC PRESENTATIONt PresentationArvind KumarÎncă nu există evaluări
- Basic Drive Programing - PF753Document68 paginiBasic Drive Programing - PF753Arvind KumarÎncă nu există evaluări
- Drives ManualDocument12 paginiDrives ManualArvind KumarÎncă nu există evaluări
- Revised PLC Drawing 250812Document14 paginiRevised PLC Drawing 250812Arvind KumarÎncă nu există evaluări
- 5 Allocation of Buffer Memories (BFM) 3 Installation and WiringDocument8 pagini5 Allocation of Buffer Memories (BFM) 3 Installation and WiringArvind KumarÎncă nu există evaluări
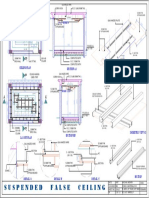
- Gypsum Ceiling PDFDocument1 paginăGypsum Ceiling PDFAanchal Mishra100% (1)
- Teradata Version DifferencesDocument3 paginiTeradata Version DifferencesShambuReddy100% (1)
- IEC Certificate 1000V Single Glass 202304Document35 paginiIEC Certificate 1000V Single Glass 202304Marian ProzorianuÎncă nu există evaluări
- Smart Lighting Market Analysis and Forecast 2025 by Global Marketing InsightsDocument5 paginiSmart Lighting Market Analysis and Forecast 2025 by Global Marketing InsightsEko Hadi Susanto100% (1)
- Sample Cover Letter: No Work ExperienceDocument4 paginiSample Cover Letter: No Work ExperienceMaya ElvisaÎncă nu există evaluări
- Recovering Valuable Metals From Recycled Photovoltaic ModulesDocument12 paginiRecovering Valuable Metals From Recycled Photovoltaic ModulesNguyễn TriếtÎncă nu există evaluări
- Star S07FS32DR Water Softener Repair PartsDocument1 paginăStar S07FS32DR Water Softener Repair PartsBillÎncă nu există evaluări
- Kodak 2000 Um SM SCHDocument157 paginiKodak 2000 Um SM SCHВиталий КоптеловÎncă nu există evaluări
- Factors Affecting Purchase Intentions in Generation Z Towards Hipster Cafe in Kelantan LOCKEDDocument70 paginiFactors Affecting Purchase Intentions in Generation Z Towards Hipster Cafe in Kelantan LOCKEDlassan199358Încă nu există evaluări
- UAV Course SyllabusDocument3 paginiUAV Course Syllabushindaputra374100% (3)
- Aksin Et Al. - The Modern Call Center - A Multi Disciplinary Perspective On Operations Management ResearchDocument24 paginiAksin Et Al. - The Modern Call Center - A Multi Disciplinary Perspective On Operations Management ResearchSam ParkÎncă nu există evaluări
- LogDocument27 paginiLogmilli0chilliÎncă nu există evaluări
- Siemens 1LE1 PDFDocument308 paginiSiemens 1LE1 PDFharold100% (1)
- F1FR80 Series Quick-Response SprinklersDocument6 paginiF1FR80 Series Quick-Response SprinklersAtila AmayaÎncă nu există evaluări
- MPTK Medium Pressure Pump Performance SpecsDocument2 paginiMPTK Medium Pressure Pump Performance SpecssaronandyÎncă nu există evaluări
- Astm D-2361Document4 paginiAstm D-2361Claudia Da Rolt0% (1)
- Microstructures and Mechanical Properties of Ultrafine Grained Pure Ti Produced by Severe Plastic DeformationDocument10 paginiMicrostructures and Mechanical Properties of Ultrafine Grained Pure Ti Produced by Severe Plastic Deformationsoni180Încă nu există evaluări
- Human Plus Machine A New Era of Automation in ManufacturingDocument8 paginiHuman Plus Machine A New Era of Automation in ManufacturingDuarte CRosaÎncă nu există evaluări
- Brief Summary of The Original COCOMO ModelDocument5 paginiBrief Summary of The Original COCOMO ModelTirthajit SinhaÎncă nu există evaluări
- Pink Fun Doodles and Blobs Math Online Class Creative Presentation SlidesCarnivalDocument28 paginiPink Fun Doodles and Blobs Math Online Class Creative Presentation SlidesCarnivalraine castorÎncă nu există evaluări
- TN 46Document23 paginiTN 46Khalil AhmadÎncă nu există evaluări
- PMO ProceduresDocument21 paginiPMO ProceduresTariq JamalÎncă nu există evaluări
- Galaxy Service ManualDocument100 paginiGalaxy Service ManualGovind RajÎncă nu există evaluări
- 176Document3 pagini176Karthik AmigoÎncă nu există evaluări
- Vlsi Implementation of Integer DCT Architectures For Hevc in Fpga TechnologyDocument12 paginiVlsi Implementation of Integer DCT Architectures For Hevc in Fpga TechnologyRaghul VishnuÎncă nu există evaluări
- Artificial Lotus Leaf by NanocastingDocument4 paginiArtificial Lotus Leaf by Nanocastinganon_527700070Încă nu există evaluări
- BNF Syntax of Ruby - Less than 40 character title for Ruby BNF syntax documentDocument2 paginiBNF Syntax of Ruby - Less than 40 character title for Ruby BNF syntax documentChristian FerrazÎncă nu există evaluări
- Adhokshaj Mishra: Thwarting The Surveillance in Online CommunicationDocument24 paginiAdhokshaj Mishra: Thwarting The Surveillance in Online CommunicationGauravRajÎncă nu există evaluări
- Aesculap: F E S SDocument28 paginiAesculap: F E S SEcole AcharafÎncă nu există evaluări
- System Engineering Management Plan (SEMPDocument2 paginiSystem Engineering Management Plan (SEMPKatie WestÎncă nu există evaluări