S-ar putea să vă placă și
- Microprocesors, Advanced: What You Need To Know About RtosesDocument29 paginiMicroprocesors, Advanced: What You Need To Know About RtosesKevin_IÎncă nu există evaluări
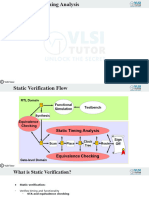
- STADocument123 paginiSTAMoon Sadia DiptheeÎncă nu există evaluări
- Process (Or Task)Document20 paginiProcess (Or Task)Monu ChouhanÎncă nu există evaluări
- 3-FPGA Logic PDFDocument36 pagini3-FPGA Logic PDFJuan David MurilloÎncă nu există evaluări
- CoE 135 Notes 2Document7 paginiCoE 135 Notes 2Iman EncarnacionÎncă nu există evaluări
- ARM RTX Real-Time Operating SystemDocument67 paginiARM RTX Real-Time Operating SystemLauren LoveÎncă nu există evaluări
- Cpe 242 Computer Architecture and Engineering Instruction Level ParallelismDocument46 paginiCpe 242 Computer Architecture and Engineering Instruction Level ParallelismSagar ManeÎncă nu există evaluări
- DFT ProtocolDocument33 paginiDFT Protocolnoor_dcetÎncă nu există evaluări
- Computer Organization and Assembly Language: Lecture 2 - x86 Processor ArchitectureDocument23 paginiComputer Organization and Assembly Language: Lecture 2 - x86 Processor ArchitectureNosreffejDelRosarioÎncă nu există evaluări
- Computer Organization & Assembly Language: CS/COE0447Document82 paginiComputer Organization & Assembly Language: CS/COE0447Danilo AlbayÎncă nu există evaluări
- Lecture 2: Implementation Alternatives & Concurrent Programming Implementation AlternativesDocument8 paginiLecture 2: Implementation Alternatives & Concurrent Programming Implementation Alternativespkrsuresh2013Încă nu există evaluări
- Synthesizable VHDL Slides AyonDocument39 paginiSynthesizable VHDL Slides AyonSreeja DasÎncă nu există evaluări
- Lecture 1-3 Introduction To Verilog HDLDocument50 paginiLecture 1-3 Introduction To Verilog HDLjjeongdongieeÎncă nu există evaluări
- VHDL Come Strumento Di Progettazione Per Circuiti Digitali VLSIDocument23 paginiVHDL Come Strumento Di Progettazione Per Circuiti Digitali VLSIunibfeÎncă nu există evaluări
- Embedded C ProgrammingDocument57 paginiEmbedded C ProgrammingPhạm Đức Sáng100% (1)
- Emulation - InterpretationDocument63 paginiEmulation - InterpretationVasanthi SenthilÎncă nu există evaluări
- Realtime Applications With RTAI: R.KOCIK - Embedded Systems DepartmentDocument69 paginiRealtime Applications With RTAI: R.KOCIK - Embedded Systems DepartmentsatyanaryanakÎncă nu există evaluări
- ch5 NewDocument44 paginich5 NewShivani AppiÎncă nu există evaluări
- Unit-I Basic Computer OrganizationDocument68 paginiUnit-I Basic Computer OrganizationSubathra Devi MourouganeÎncă nu există evaluări
- 15 SynchronizationDocument120 pagini15 Synchronizationyogeshwari bahiramÎncă nu există evaluări
- Data Structure and Input ProcessingDocument36 paginiData Structure and Input ProcessingDhivya GokulÎncă nu există evaluări
- ILP Techniques: Laxmi N. Bhuyan CS 162 Spring 2003Document23 paginiILP Techniques: Laxmi N. Bhuyan CS 162 Spring 2003Sangeetha BajanthriÎncă nu există evaluări
- EC 303 Chapter 2Document48 paginiEC 303 Chapter 2PrevenaManiamÎncă nu există evaluări
- Laplante Ch3 UpdatedDocument45 paginiLaplante Ch3 UpdatedAdugna NegeroÎncă nu există evaluări
- Ch04 Network DesignDocument45 paginiCh04 Network DesignEric KialÎncă nu există evaluări
- Inter-Task CommunicationDocument21 paginiInter-Task CommunicationAnonymous N1sYTvEMXQÎncă nu există evaluări
- Embedded Systems Design: Pipelining and Instruction SchedulingDocument48 paginiEmbedded Systems Design: Pipelining and Instruction SchedulingMisbah Sajid ChaudhryÎncă nu există evaluări
- VHDL Fir FilterDocument31 paginiVHDL Fir FilterSyam SanalÎncă nu există evaluări
- Introduction To VHDL: by BODDU LokeshDocument22 paginiIntroduction To VHDL: by BODDU LokeshKiran GunasegaranÎncă nu există evaluări
- Transport Control Protocol: OutlineDocument18 paginiTransport Control Protocol: OutlineSaranya BaskaranÎncă nu există evaluări
- 5.6.7 Lab Network Troubleshooting ToolsDocument8 pagini5.6.7 Lab Network Troubleshooting ToolsarseneÎncă nu există evaluări
- Introduction To The Digital Flow in Mixed Environment (2 - Back End)Document89 paginiIntroduction To The Digital Flow in Mixed Environment (2 - Back End)Nguyen Van ToanÎncă nu există evaluări
- MT ConnectDocument61 paginiMT ConnectMagesh SundaramÎncă nu există evaluări
- Chương 6 FreeRTOSDocument90 paginiChương 6 FreeRTOSFawkes SangÎncă nu există evaluări
- Arhitectura CalculatoarelorDocument22 paginiArhitectura CalculatoarelormiryangelÎncă nu există evaluări
- DSD PPT Usr and CN and Odd DividerDocument22 paginiDSD PPT Usr and CN and Odd Dividerece19637ec003Încă nu există evaluări
- Reliable Byte-Stream (TCP) : OutlineDocument19 paginiReliable Byte-Stream (TCP) : OutlineSangeetha BajanthriÎncă nu există evaluări
- Timing Issues in FPGA Synchronous Circuit Design: ECE 428 Programmable ASIC DesignDocument33 paginiTiming Issues in FPGA Synchronous Circuit Design: ECE 428 Programmable ASIC DesignVarun KondagunturiÎncă nu există evaluări
- Con CurrencyDocument20 paginiCon CurrencyWilsmith SmithÎncă nu există evaluări
- Digital ApplicationsDocument14 paginiDigital Applications22e132Încă nu există evaluări
- L13 Multicycle DatapathDocument62 paginiL13 Multicycle DatapathIsaacÎncă nu există evaluări
- Unit 4Document26 paginiUnit 4Dr. M V GANESWARA RAOÎncă nu există evaluări
- IT 209 Lecture 7 2021Document47 paginiIT 209 Lecture 7 2021Jill chaudharyÎncă nu există evaluări
- Module 4 - Chapter 6 Process SynchronizationDocument46 paginiModule 4 - Chapter 6 Process SynchronizationBarry AllenÎncă nu există evaluări
- TCAP - Transaction Capabilities Application Part Is Used byDocument7 paginiTCAP - Transaction Capabilities Application Part Is Used byramarneh100% (1)
- STA Prime TimeDocument125 paginiSTA Prime TimeNishanth GowdaÎncă nu există evaluări
- IA2 - Scheme & Sol MC - by TauseefDocument6 paginiIA2 - Scheme & Sol MC - by Tauseefjvgirish74Încă nu există evaluări
- Slides 83 Ietf 0 Operations Administration and Maintenance TutorialDocument74 paginiSlides 83 Ietf 0 Operations Administration and Maintenance TutorialcookieÎncă nu există evaluări
- Elce2016 Debug RT PDFDocument80 paginiElce2016 Debug RT PDFaaaaÎncă nu există evaluări
- PIC Architecture and Assembler Programming: (Including Software Time Delay Subroutine)Document16 paginiPIC Architecture and Assembler Programming: (Including Software Time Delay Subroutine)Ashim KumarÎncă nu există evaluări
- CH 05Document74 paginiCH 05shahzadshafi7781Încă nu există evaluări
- 17 RegistersDocument20 pagini17 RegistersNeeraj SinghÎncă nu există evaluări
- 17 RegistersDocument20 pagini17 RegistersPawan Kumar KÎncă nu există evaluări
- Clock and SynchronizationDocument99 paginiClock and SynchronizationpawanzÎncă nu există evaluări
- 1up PDF 2015su CS61C L10 SK FSMDocument47 pagini1up PDF 2015su CS61C L10 SK FSMyanagic605Încă nu există evaluări
- CISCO PACKET TRACER LABS: Best practice of configuring or troubleshooting NetworkDe la EverandCISCO PACKET TRACER LABS: Best practice of configuring or troubleshooting NetworkÎncă nu există evaluări
- Projects With Microcontrollers And PICCDe la EverandProjects With Microcontrollers And PICCEvaluare: 5 din 5 stele5/5 (1)
- WAN TECHNOLOGY FRAME-RELAY: An Expert's Handbook of Navigating Frame Relay NetworksDe la EverandWAN TECHNOLOGY FRAME-RELAY: An Expert's Handbook of Navigating Frame Relay NetworksÎncă nu există evaluări
- Ai ModelDocument3 paginiAi ModelveenadivyakishÎncă nu există evaluări
- AESDocument22 paginiAESveenadivyakishÎncă nu există evaluări
- Identify The Type of Instrument GroupingDocument2 paginiIdentify The Type of Instrument GroupingveenadivyakishÎncă nu există evaluări
- Introduction To Digital Hardware DesignDocument25 paginiIntroduction To Digital Hardware DesignveenadivyakishÎncă nu există evaluări
- Introduction To Digital Hardware DesignDocument25 paginiIntroduction To Digital Hardware DesignveenadivyakishÎncă nu există evaluări
- Computer Communication Networks (Sub., Code: 10EC71) : Unit-IDocument75 paginiComputer Communication Networks (Sub., Code: 10EC71) : Unit-IveenadivyakishÎncă nu există evaluări
- The RSA AlgorithmDocument15 paginiThe RSA AlgorithmveenadivyakishÎncă nu există evaluări
- Introduction To Digital Hardware DesignDocument25 paginiIntroduction To Digital Hardware DesignveenadivyakishÎncă nu există evaluări
- Multiplefull NewDocument42 paginiMultiplefull NewveenadivyakishÎncă nu există evaluări
- Business and Commercial Aviation MagazineDocument10 paginiBusiness and Commercial Aviation MagazineveenadivyakishÎncă nu există evaluări
- Signal Flow GraphDocument36 paginiSignal Flow Graphveenadivyakish100% (1)
- Datalink Layer 1Document81 paginiDatalink Layer 1veenadivyakishÎncă nu există evaluări
- Identify The Network Shown in The FigureDocument2 paginiIdentify The Network Shown in The FigureveenadivyakishÎncă nu există evaluări
- jeHR7q - HMW - 1486899278 - WORKSHEET GRADE 3 MONEY PDFDocument4 paginijeHR7q - HMW - 1486899278 - WORKSHEET GRADE 3 MONEY PDFveenadivyakish100% (2)
- DC - Module IIDocument19 paginiDC - Module IIveenadivyakishÎncă nu există evaluări
- Unit 1 BDocument79 paginiUnit 1 BveenadivyakishÎncă nu există evaluări
- jeHR7q - HMW - 1486899278 - WORKSHEET GRADE 3 MONEY PDFDocument4 paginijeHR7q - HMW - 1486899278 - WORKSHEET GRADE 3 MONEY PDFveenadivyakish100% (2)
- Error Detection and CorrectionDocument46 paginiError Detection and CorrectionveenadivyakishÎncă nu există evaluări
- Nlcs Quiz 2018Document2 paginiNlcs Quiz 2018veenadivyakishÎncă nu există evaluări
- Unit 1 Module 2 Air Data InstrumentsDocument37 paginiUnit 1 Module 2 Air Data Instrumentsveenadivyakish100% (1)
- TOPIC: "ICT Powering An Inclusive Education - Telecom Namibia's Contribution" 4 National ICT Summit 2017Document33 paginiTOPIC: "ICT Powering An Inclusive Education - Telecom Namibia's Contribution" 4 National ICT Summit 2017veenadivyakishÎncă nu există evaluări
- Coursera - Online Courses From Top UniversitiesDocument3 paginiCoursera - Online Courses From Top UniversitiesveenadivyakishÎncă nu există evaluări
- Quad Store (TM) - 37 in 1 Sensor Modules Kit For Arduino Uno R3, Mega 2560, Raspberry Pi With BoxDocument1 paginăQuad Store (TM) - 37 in 1 Sensor Modules Kit For Arduino Uno R3, Mega 2560, Raspberry Pi With BoxveenadivyakishÎncă nu există evaluări
- State Variable Models: Dorf and Bishop, Modern Control SystemsDocument39 paginiState Variable Models: Dorf and Bishop, Modern Control SystemsveenadivyakishÎncă nu există evaluări
- Chapter 18 CVR & FDRDocument41 paginiChapter 18 CVR & FDRveenadivyakishÎncă nu există evaluări
- EIL Underground StoragesDocument12 paginiEIL Underground StoragesanandelectricalsÎncă nu există evaluări
- Granta Note Installation GuidelinesDocument11 paginiGranta Note Installation GuidelinesAshwary Sheel Wali Research Scholar, Dept of Mech Engg., IIT (BHU)Încă nu există evaluări
- 57-606.9 Eclipse Model 706 Hart Io 1 PDFDocument108 pagini57-606.9 Eclipse Model 706 Hart Io 1 PDFAbdul Shaharlal EÎncă nu există evaluări
- Android Developers Castellano - 12 Ubicacion de UsuarioDocument53 paginiAndroid Developers Castellano - 12 Ubicacion de UsuarioChristian QuiñonezÎncă nu există evaluări
- TATADocument14 paginiTATAshashi2021Încă nu există evaluări
- Forcepoint ONE CASB DatasheetDocument6 paginiForcepoint ONE CASB DatasheetP BarreraÎncă nu există evaluări
- PARKER Instrument TubingDocument10 paginiPARKER Instrument TubingDaniel MarÎncă nu există evaluări
- Engraving ProductsDocument60 paginiEngraving ProductsglobalsignsÎncă nu există evaluări
- Folder Geral Grupo Tormene (En)Document9 paginiFolder Geral Grupo Tormene (En)Douglas HayashiÎncă nu există evaluări
- Richard Patterson Building Broadband Network in 2019 UKNOF RESIZEDDocument32 paginiRichard Patterson Building Broadband Network in 2019 UKNOF RESIZEDjjkkkÎncă nu există evaluări
- AQ12FANDocument9 paginiAQ12FANhdave32Încă nu există evaluări
- Pro Core 45598 PDFDocument174 paginiPro Core 45598 PDFPedro Pablo Giraldo NuñezÎncă nu există evaluări
- DB 01.01.03.02 Pump M189 2Document2 paginiDB 01.01.03.02 Pump M189 2PRAMOD KUMARÎncă nu există evaluări
- 2020 Fully-Auto Nucleic Acid Extraction Instrument Price List V1.0Document1 pagină2020 Fully-Auto Nucleic Acid Extraction Instrument Price List V1.0Dwomoh SarpongÎncă nu există evaluări
- The ECDIS Solution: Chartpilot 1100Document8 paginiThe ECDIS Solution: Chartpilot 1100Thutasoe thomasÎncă nu există evaluări
- Especificaciones Tecnicas ZT96ADocument14 paginiEspecificaciones Tecnicas ZT96AJuan Marcos RodriguezÎncă nu există evaluări
- Bsbinm601 Copy 1Document13 paginiBsbinm601 Copy 1sayan goswami75% (4)
- Electric Current Ohms Law ResistanceDocument28 paginiElectric Current Ohms Law ResistanceChristianÎncă nu există evaluări
- Course Brochure 94Document2 paginiCourse Brochure 94Gopi BvÎncă nu există evaluări
- DIATRON Abacus 5 LeafletDocument4 paginiDIATRON Abacus 5 LeafletPopovÎncă nu există evaluări
- Safe 4.0 Distilled: Applying The Scaled Agile Framework For Lean Software and Systems Engineering. 2017Document2 paginiSafe 4.0 Distilled: Applying The Scaled Agile Framework For Lean Software and Systems Engineering. 2017Angelina GultomÎncă nu există evaluări
- Manual de Audi Q7 2008 en EspanolDocument2 paginiManual de Audi Q7 2008 en EspanolAnonymous SHo7jr33% (3)
- W516 E1 02+CP1L ELEM - CPU+OperManual PDFDocument854 paginiW516 E1 02+CP1L ELEM - CPU+OperManual PDFAnonymous POne8dÎncă nu există evaluări
- HE Readboard: D E C E 1Document5 paginiHE Readboard: D E C E 1Abdullah ShahidÎncă nu există evaluări
- Power Consumption Table For RRUDocument3 paginiPower Consumption Table For RRUsidney TeahÎncă nu există evaluări
- ECO 55 O (L) C 2 - Two Stage Light Oil Burners - Products - Ecostar Combustion SystemsDocument3 paginiECO 55 O (L) C 2 - Two Stage Light Oil Burners - Products - Ecostar Combustion SystemsUno MariconÎncă nu există evaluări
- Acs BD Schematic Most CurrentDocument8 paginiAcs BD Schematic Most CurrentgregfortkampÎncă nu există evaluări
- Gridcom: E-Terra DXCDocument4 paginiGridcom: E-Terra DXCsatyam_scribdÎncă nu există evaluări
- Object Oriented Analysis and Design NotesDocument62 paginiObject Oriented Analysis and Design Notesvraj patelÎncă nu există evaluări
- F 450A, 450AJ JLG Service EnglishDocument652 paginiF 450A, 450AJ JLG Service Englishspamrql2Încă nu există evaluări