S-ar putea să vă placă și
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- 2009 09 Ben Cohen SBPLDocument19 pagini2009 09 Ben Cohen SBPLWillow GarageÎncă nu există evaluări
- Mrinal Kalakrishnan: CHOMP Motion PlannerDocument15 paginiMrinal Kalakrishnan: CHOMP Motion PlannerWillow GarageÎncă nu există evaluări
- Marius Muja: Tabletop Object DetectionDocument17 paginiMarius Muja: Tabletop Object DetectionWillow GarageÎncă nu există evaluări
- ROS Concepts and Command-Line OverviewDocument37 paginiROS Concepts and Command-Line OverviewWillow Garage100% (3)
- Angelic Hierarchical PlanningDocument38 paginiAngelic Hierarchical PlanningWillow GarageÎncă nu există evaluări
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (345)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- IntroAI 2020 21 v4Document55 paginiIntroAI 2020 21 v4ManlÎncă nu există evaluări
- International Journal of Artificial Intelligence and Soft Computing (IJAISC)Document2 paginiInternational Journal of Artificial Intelligence and Soft Computing (IJAISC)CS & ITÎncă nu există evaluări
- Industrial Revolution 4.0 and Its Impact To Civilization: SubtitleDocument8 paginiIndustrial Revolution 4.0 and Its Impact To Civilization: SubtitleAh-Yew 404Încă nu există evaluări
- SIFT, Track, OpenCV, Image ProcessingDocument9 paginiSIFT, Track, OpenCV, Image ProcessingtusarÎncă nu există evaluări
- Sentiment Classification With Deep Neural Networks: Yi ZhouDocument58 paginiSentiment Classification With Deep Neural Networks: Yi ZhouEdouard_CarvalhoÎncă nu există evaluări
- What Is Nanotechnology - NanoDocument3 paginiWhat Is Nanotechnology - Nanoghoraisoumendra9252Încă nu există evaluări
- Hrai Center of ExcellenceDocument19 paginiHrai Center of ExcellenceCOTPOTÎncă nu există evaluări
- M .Ai A: A I 101 F W - C O AI A Vip Ai 101 C SDocument22 paginiM .Ai A: A I 101 F W - C O AI A Vip Ai 101 C Smehmet nedimÎncă nu există evaluări
- ANN QuizDocument6 paginiANN Quizsnreddy b100% (2)
- AI OverviewDocument5 paginiAI OverviewGonzalo LopezÎncă nu există evaluări
- BE Computer Projects: 2021-22: Group No. Guide Project Title Domain Roll No Full NameDocument4 paginiBE Computer Projects: 2021-22: Group No. Guide Project Title Domain Roll No Full Namesun foruÎncă nu există evaluări
- Nano Cars Into The Robotics For The Realistic MovementDocument20 paginiNano Cars Into The Robotics For The Realistic MovementSwarag Appu SmkÎncă nu există evaluări
- FTI - Tech Trends Report 2017Document155 paginiFTI - Tech Trends Report 2017Corrado SchellinoÎncă nu există evaluări
- Nano World - Lesson With Answer KeyDocument26 paginiNano World - Lesson With Answer KeyAngelie JalandoniÎncă nu există evaluări
- Multi-Task Learning On Mnist Image DatasetsDocument4 paginiMulti-Task Learning On Mnist Image DatasetsprogrammerÎncă nu există evaluări
- 3 - 2 - Nano WorldDocument35 pagini3 - 2 - Nano WorldMelody YayongÎncă nu există evaluări
- Age Estimation Using Ensemble of Deep Learning Models: Author NameDocument46 paginiAge Estimation Using Ensemble of Deep Learning Models: Author NameRifat ParveenÎncă nu există evaluări
- HTTP en - Wikipedia.org Wiki Blue Brain ProjectDocument4 paginiHTTP en - Wikipedia.org Wiki Blue Brain ProjectPasham ShivaÎncă nu există evaluări
- University WaterlooDocument2 paginiUniversity Waterlooapi-301826856Încă nu există evaluări
- OOVIRT Virtual Tour Brochure v2 2Document8 paginiOOVIRT Virtual Tour Brochure v2 2TtttÎncă nu există evaluări
- Robotics Engineering: ME 406T Unit-1 Robot Fundamentals Lecture-1Document29 paginiRobotics Engineering: ME 406T Unit-1 Robot Fundamentals Lecture-1werwa100% (1)
- Euv Sources For Lithography PDFDocument2 paginiEuv Sources For Lithography PDFChrisÎncă nu există evaluări
- Deep Residual Learning For Image Recognition: Kaiming He Xiangyu Zhang Shaoqing Ren Jian Sun Microsoft ResearchDocument7 paginiDeep Residual Learning For Image Recognition: Kaiming He Xiangyu Zhang Shaoqing Ren Jian Sun Microsoft ResearchAkshat GurnaniÎncă nu există evaluări
- CNN Based Action Recognition and Pose Estimation For Classifying Animal Behavior From Videos A SurveyDocument29 paginiCNN Based Action Recognition and Pose Estimation For Classifying Animal Behavior From Videos A SurveyEdwin LeeÎncă nu există evaluări
- Sds Podcast Episode 86 Five Minute Friday: Computer VisionDocument6 paginiSds Podcast Episode 86 Five Minute Friday: Computer Visionwardatul jannahÎncă nu există evaluări
- Computer Vision: Presented By: Bikram Neupane (1925101) Sudeep Shrestha (1925111) MSC - Cs IIIDocument23 paginiComputer Vision: Presented By: Bikram Neupane (1925101) Sudeep Shrestha (1925111) MSC - Cs IIIbikram neupaneÎncă nu există evaluări
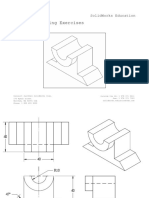
- Detailed Drawing Exercises: Solidworks EducationDocument51 paginiDetailed Drawing Exercises: Solidworks EducationRaja PandiÎncă nu există evaluări
- Batch Details 2019 2024 FDocument70 paginiBatch Details 2019 2024 FASHISH H PES1UG19EC064PESU ECE StudentÎncă nu există evaluări
- Eng - RC - Gr8 - Vol3 - Robots That Are Alive - AY2022-23 - TBASDocument5 paginiEng - RC - Gr8 - Vol3 - Robots That Are Alive - AY2022-23 - TBASminikumari3264Încă nu există evaluări
- Artificial Intelligence-IT314Document2 paginiArtificial Intelligence-IT314aamirÎncă nu există evaluări