S-ar putea să vă placă și
- Certifiable Software Applications 1: Main ProcessesDe la EverandCertifiable Software Applications 1: Main ProcessesÎncă nu există evaluări
- Master of Computer Application (MCA) - Semester 3 MC0071 - Software Engineering - 4 CreditsDocument8 paginiMaster of Computer Application (MCA) - Semester 3 MC0071 - Software Engineering - 4 CreditsH Manohar RaykerÎncă nu există evaluări
- Fault Tolerant ComputingDocument4 paginiFault Tolerant ComputingMayowa SunusiÎncă nu există evaluări
- Penetration Testing Fundamentals-2: Penetration Testing Study Guide To Breaking Into SystemsDe la EverandPenetration Testing Fundamentals-2: Penetration Testing Study Guide To Breaking Into SystemsÎncă nu există evaluări
- Es Unit3 FinalDocument9 paginiEs Unit3 FinalYadavilli VinayÎncă nu există evaluări
- Model Driven Development for Embedded Software: Application to Communications for Drone SwarmDe la EverandModel Driven Development for Embedded Software: Application to Communications for Drone SwarmÎncă nu există evaluări
- CSC 505Document5 paginiCSC 505Ifedayo Akinsira-OlumideÎncă nu există evaluări
- July 2011 Master of Computer Application (MCA) - Semester 3 MC0071 - Software Engineering - 4 CreditsDocument11 paginiJuly 2011 Master of Computer Application (MCA) - Semester 3 MC0071 - Software Engineering - 4 CreditsAshish GuptaÎncă nu există evaluări
- February 2011 Master of Computer Application (MCA) - Semester 3 MC0071 - Software Engineering - 4 Credits (Book ID: B0808 & B0809) Assignment Set - 1 (60 Marks)Document14 paginiFebruary 2011 Master of Computer Application (MCA) - Semester 3 MC0071 - Software Engineering - 4 Credits (Book ID: B0808 & B0809) Assignment Set - 1 (60 Marks)Aeron FrancoÎncă nu există evaluări
- Software Project Management - Chapter 7 Software Dependability and Critical SystemsDocument67 paginiSoftware Project Management - Chapter 7 Software Dependability and Critical SystemsZahir SherÎncă nu există evaluări
- SM 17 NewDocument40 paginiSM 17 NewthenikkitrÎncă nu există evaluări
- Hema.V Sikkim Manipal University - DE Reg:No 511119346 Subject: MC0071-Software Engineering. Book ID: B0808 & B0809 Assignment 1 & 2Document25 paginiHema.V Sikkim Manipal University - DE Reg:No 511119346 Subject: MC0071-Software Engineering. Book ID: B0808 & B0809 Assignment 1 & 2Hema Sudarshan VÎncă nu există evaluări
- 25 Hotdep 2007Document4 pagini25 Hotdep 2007mkk123Încă nu există evaluări
- Unit 11 Dependability-and-SecurityDocument39 paginiUnit 11 Dependability-and-SecurityMysto GanÎncă nu există evaluări
- Design Patterns For High AvailabilityDocument10 paginiDesign Patterns For High AvailabilityCristiano NovelloÎncă nu există evaluări
- SWE 205 - Introduction To Software Engineering: - Critical System Specifications (Chapter 9)Document22 paginiSWE 205 - Introduction To Software Engineering: - Critical System Specifications (Chapter 9)s.b.v.seshagiri1407Încă nu există evaluări
- Intelligent Traffic Light ControlDocument8 paginiIntelligent Traffic Light ControlPavan Murali ManoharaÎncă nu există evaluări
- Software Quality EngineeringDocument77 paginiSoftware Quality Engineeringsp16b e0015Încă nu există evaluări
- SE - Ch.11 - Software Quality AttributesDocument23 paginiSE - Ch.11 - Software Quality AttributesFhimÎncă nu există evaluări
- Testing of Embedded System: Version 2 EE IIT, Kharagpur 1Document12 paginiTesting of Embedded System: Version 2 EE IIT, Kharagpur 1ahamed100% (1)
- Wa0021Document24 paginiWa0021I'M POPZSHA GAMERÎncă nu există evaluări
- Sem PronDocument35 paginiSem PronAllyn SempronÎncă nu există evaluări
- IntroSoftwareEng12 PDFDocument7 paginiIntroSoftwareEng12 PDFjeep2014Încă nu există evaluări
- Chapter 14 Security Engineering 1Document48 paginiChapter 14 Security Engineering 1Fattah MuhyiddeenÎncă nu există evaluări
- Netmeds SrsDocument3 paginiNetmeds SrsDirector Ishu ChawlaÎncă nu există evaluări
- SoftwareDocument4 paginiSoftwareJr CialanaÎncă nu există evaluări
- Good Practice Guide Process Control and SCADA SecurityDocument21 paginiGood Practice Guide Process Control and SCADA SecurityJorge Daniel MonteiroÎncă nu există evaluări
- Section Taken From The Software Requirements Document Requirements FactorDocument5 paginiSection Taken From The Software Requirements Document Requirements FactorAdnan AnasÎncă nu există evaluări
- Circuit Breakers by SoftwareDocument21 paginiCircuit Breakers by SoftwareKushalgym888 gym888Încă nu există evaluări
- Fault Lecture 01 - IntroductionDocument20 paginiFault Lecture 01 - IntroductionShayma MostafaÎncă nu există evaluări
- Redundant and Voting SystemDocument10 paginiRedundant and Voting SystemGnanaseharan ArunachalamÎncă nu există evaluări
- Simulation-Based Fault-Tolerant Multiprocessors SystemDocument10 paginiSimulation-Based Fault-Tolerant Multiprocessors SystemTELKOMNIKAÎncă nu există evaluări
- System Analysis and Desing Ignou Bca Sem 3Document11 paginiSystem Analysis and Desing Ignou Bca Sem 3moosaÎncă nu există evaluări
- SM-17-9th Ed FinalDocument48 paginiSM-17-9th Ed FinaljiajiaÎncă nu există evaluări
- DCS CourseDocument141 paginiDCS Coursegion_ro401Încă nu există evaluări
- System Verification Helps Validate Complex Integrated SystemsDocument8 paginiSystem Verification Helps Validate Complex Integrated SystemsXa MauÎncă nu există evaluări
- Design and Evaluation of Hybrid Fault-Detection SystemsDocument12 paginiDesign and Evaluation of Hybrid Fault-Detection SystemsAbdrazag MohÎncă nu există evaluări
- Patch ManagementDocument6 paginiPatch ManagementHiren DhadukÎncă nu există evaluări
- Softeng Ofse Answers v12Document56 paginiSofteng Ofse Answers v12eresha_tonywijayaÎncă nu există evaluări
- Seminar Report: On Under Guidance of Prof - Abinash MohapatraDocument25 paginiSeminar Report: On Under Guidance of Prof - Abinash MohapatraYeshwanth YenugupalliÎncă nu există evaluări
- Design, Testing, and Evaluation Techniques For Software Reliability EngineeringDocument8 paginiDesign, Testing, and Evaluation Techniques For Software Reliability Engineeringjackngare99Încă nu există evaluări
- tmpAA19 TMPDocument10 paginitmpAA19 TMPFrontiersÎncă nu există evaluări
- Intrusion Detectionusing Address Monitoring: K. Rahimunnisa, S. Suresh Kumar, Kavya T. S, and Anoop Suraj ADocument3 paginiIntrusion Detectionusing Address Monitoring: K. Rahimunnisa, S. Suresh Kumar, Kavya T. S, and Anoop Suraj Aankitk_96Încă nu există evaluări
- 1 Chapter 5 Resilience EngineeringDocument43 pagini1 Chapter 5 Resilience EngineeringThiện LêÎncă nu există evaluări
- Lecture 4 CHaracteristics and Quality Attributes of Embedded SystemsDocument27 paginiLecture 4 CHaracteristics and Quality Attributes of Embedded SystemsSaikrishnaÎncă nu există evaluări
- 1 Chapter 9 Software EvolutionDocument44 pagini1 Chapter 9 Software EvolutionRazan AlradadyÎncă nu există evaluări
- Quality Attributes of Embedded SystemDocument19 paginiQuality Attributes of Embedded SystemSHASHIKANTÎncă nu există evaluări
- Circuit Breaker Maintenance by Mobile Agent Software TechnologyDocument22 paginiCircuit Breaker Maintenance by Mobile Agent Software Technologydinesh414875% (4)
- 9.F Operation of Computerised SystemsDocument9 pagini9.F Operation of Computerised SystemsGirgis AiadÎncă nu există evaluări
- High Level Failure Analysis For Integrated Modular Avionics: Philippa Conmy, John McdermidDocument9 paginiHigh Level Failure Analysis For Integrated Modular Avionics: Philippa Conmy, John Mcdermidmakumba1972Încă nu există evaluări
- Ran Dell 75Document18 paginiRan Dell 75Adrian CucerzanÎncă nu există evaluări
- Cap 10Document21 paginiCap 10tuk hwÎncă nu există evaluări
- Designing A Control System For High AvailabilityDocument10 paginiDesigning A Control System For High AvailabilityZulkernain Omer TariqÎncă nu există evaluări
- EMBL01E-Module 3Document29 paginiEMBL01E-Module 3Ronny Fae FabonÎncă nu există evaluări
- Assignment Submission FormDocument22 paginiAssignment Submission FormErrica CheongÎncă nu există evaluări
- Piyush 303Document9 paginiPiyush 303saurabh singh gahlotÎncă nu există evaluări
- Area: Control Systems Title: What Is An Integrated Control System? Author: Healey Date: 10 April 2008Document4 paginiArea: Control Systems Title: What Is An Integrated Control System? Author: Healey Date: 10 April 2008sina20795Încă nu există evaluări
- Software EngDocument11 paginiSoftware EngRamazan Barazan100% (2)
- Patch Management PlanDocument6 paginiPatch Management PlanManish Bateja100% (1)
- Software Engineering Part 25Document50 paginiSoftware Engineering Part 25Er Ravi GuptaÎncă nu există evaluări
- John LessonDocument12 paginiJohn LessonEr Ravi GuptaÎncă nu există evaluări
- Bible - American Standard VersionDocument3.117 paginiBible - American Standard VersionEr Ravi GuptaÎncă nu există evaluări
- 1 Chapter 25 Configuration ManagementDocument46 pagini1 Chapter 25 Configuration ManagementEr Ravi GuptaÎncă nu există evaluări
- Software Engineering Part 22Document53 paginiSoftware Engineering Part 22Er Ravi GuptaÎncă nu există evaluări
- Quality ManagementDocument51 paginiQuality Managementsumerian786Încă nu există evaluări
- Software Engineering Part 21Document47 paginiSoftware Engineering Part 21Er Ravi GuptaÎncă nu există evaluări
- Software Engineering Part 16Document55 paginiSoftware Engineering Part 16Er Ravi GuptaÎncă nu există evaluări
- Software Engineering Part 10Document46 paginiSoftware Engineering Part 10Er Ravi GuptaÎncă nu există evaluări
- Software Engineering Part 19Document46 paginiSoftware Engineering Part 19Er Ravi GuptaÎncă nu există evaluări
- 1 Chapter 19 Service-Oriented ArchitectureDocument53 pagini1 Chapter 19 Service-Oriented ArchitectureEr Ravi GuptaÎncă nu există evaluări
- Software Engineering Part 17Document57 paginiSoftware Engineering Part 17Er Ravi GuptaÎncă nu există evaluări
- Software Engineering Part 20Document46 paginiSoftware Engineering Part 20Er Ravi GuptaÎncă nu există evaluări
- Software Engineering Part 14Document47 paginiSoftware Engineering Part 14Er Ravi GuptaÎncă nu există evaluări
- Software Engineering Part 15Document52 paginiSoftware Engineering Part 15Er Ravi GuptaÎncă nu există evaluări
- Chapter 14 Security Engineering 1Document48 paginiChapter 14 Security Engineering 1Fattah MuhyiddeenÎncă nu există evaluări
- 1 Chapter 12 Dependability and Security SpecificationDocument55 pagini1 Chapter 12 Dependability and Security SpecificationEr Ravi GuptaÎncă nu există evaluări
- 1 Chapter 8 Software TestingDocument60 pagini1 Chapter 8 Software TestingOriflame KozmetikaÎncă nu există evaluări
- 1 Chapter 9 Software EvolutionDocument57 pagini1 Chapter 9 Software EvolutionHoàng Đá ĐỏÎncă nu există evaluări
- Chapter6 Architectural Design Lecture SlidesDocument54 paginiChapter6 Architectural Design Lecture SlidesMasixole Max NtshingaÎncă nu există evaluări
- 1 Chapter 7 Design and ImplementationDocument56 pagini1 Chapter 7 Design and ImplementationHoàng Đá ĐỏÎncă nu există evaluări
- Principles of Gas Chromatography 2Document12 paginiPrinciples of Gas Chromatography 2Enanahmed EnanÎncă nu există evaluări
- Imn 903000 E06Document158 paginiImn 903000 E06Paul CasaleÎncă nu există evaluări
- Slides Prepared by John S. Loucks St. Edward's University: 1 Slide © 2003 Thomson/South-WesternDocument34 paginiSlides Prepared by John S. Loucks St. Edward's University: 1 Slide © 2003 Thomson/South-WesternHRish BhimberÎncă nu există evaluări
- A Simulation of Attempts To Influence Crowd Dynamics'Document6 paginiA Simulation of Attempts To Influence Crowd Dynamics'KhairulÎncă nu există evaluări
- Arduino - Wikipedia PDFDocument70 paginiArduino - Wikipedia PDFJheremy BayonetaÎncă nu există evaluări
- Workspace Satisfaction - The Privacy-Communication Trade-Off in Open-Plan OfficesDocument9 paginiWorkspace Satisfaction - The Privacy-Communication Trade-Off in Open-Plan OfficesAyşe Nur TürkerÎncă nu există evaluări
- Sodium Metal MSDSDocument4 paginiSodium Metal MSDSRama Krishnan HÎncă nu există evaluări
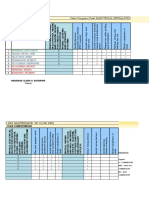
- Class Progress Chart Electrical Installation and Maintenance NC Ii (196 HRS)Document2 paginiClass Progress Chart Electrical Installation and Maintenance NC Ii (196 HRS)Shairrah Claire Bañares BatangueÎncă nu există evaluări
- Bipolar Junction Transistor ModelsDocument21 paginiBipolar Junction Transistor ModelsecedepttÎncă nu există evaluări
- HAARPDocument230 paginiHAARPMartin hume100% (2)
- Trigonometric Substitution: Jzfa20Document12 paginiTrigonometric Substitution: Jzfa20Samuel SmallmanÎncă nu există evaluări
- 3g3JX InverterDocument262 pagini3g3JX InverterdatdttvuÎncă nu există evaluări
- Quadratic Equation - MATH IS FUNDocument8 paginiQuadratic Equation - MATH IS FUNChanchan LebumfacilÎncă nu există evaluări
- PIA B2 - Module 2 (PHYSICS) SubModule 2.2 (Mechanics) FinalDocument82 paginiPIA B2 - Module 2 (PHYSICS) SubModule 2.2 (Mechanics) Finalsamarrana1234679Încă nu există evaluări
- Wa Wa40-3 Komatsu s3d84Document2 paginiWa Wa40-3 Komatsu s3d84james foxÎncă nu există evaluări
- Alcatel 4029 EngDocument31 paginiAlcatel 4029 Engafsanto2000Încă nu există evaluări
- Wrong Number Series 23 June by Aashish AroraDocument53 paginiWrong Number Series 23 June by Aashish AroraSaurabh KatiyarÎncă nu există evaluări
- Bsm2300a SeriesDocument324 paginiBsm2300a SeriesIBRAHIMÎncă nu există evaluări
- Competition Systems IGN1A Inductive Smart Coil - IGN1ADocument2 paginiCompetition Systems IGN1A Inductive Smart Coil - IGN1AJoão Lucas ZaionsÎncă nu există evaluări
- Final Defence 2078Document43 paginiFinal Defence 2078XxxÎncă nu există evaluări
- Ashton and Feldman 2003. BERGMANN'S RULE IN NONAVIAN REPTILES - TURTLES FOLLOW IT, LIZARDS AND SNAKE REVERSE IT PDFDocument13 paginiAshton and Feldman 2003. BERGMANN'S RULE IN NONAVIAN REPTILES - TURTLES FOLLOW IT, LIZARDS AND SNAKE REVERSE IT PDFFred LimaÎncă nu există evaluări
- Analysis and Design of Filament Power Supply With PDFDocument5 paginiAnalysis and Design of Filament Power Supply With PDFHoracio Dorantes ReyesÎncă nu există evaluări
- Ch24 TestbankDocument40 paginiCh24 TestbankIannah Malvar100% (1)
- Prime Number FactorizationDocument10 paginiPrime Number FactorizationedithaenriquezÎncă nu există evaluări
- TransistorDocument1 paginăTransistorXhaÎncă nu există evaluări
- Grade9 Physics PDFDocument2 paginiGrade9 Physics PDFRajÎncă nu există evaluări
- User Manual of Egov 11.0 Implementation of It Solution For RVNL D3799 Document Version / DetailsDocument64 paginiUser Manual of Egov 11.0 Implementation of It Solution For RVNL D3799 Document Version / DetailsRVNLPKG6B VBL-GTLMÎncă nu există evaluări
- UML Class Diagram Examples of Common Scenarios - EdrawMaxDocument12 paginiUML Class Diagram Examples of Common Scenarios - EdrawMaxelizabeth enggÎncă nu există evaluări
- Evaluasi Pengelolaan Sampah Di Kawasan Pantai Kabupaten Bantul, D. I. YogyakartaDocument14 paginiEvaluasi Pengelolaan Sampah Di Kawasan Pantai Kabupaten Bantul, D. I. YogyakartaRavyola AzzahraÎncă nu există evaluări