S-ar putea să vă placă și
- User Guide 250616Document12 paginiUser Guide 250616Divya ShettyÎncă nu există evaluări
- 3 2 1Document9 pagini3 2 1Divya ShettyÎncă nu există evaluări
- Multi-Billion Dollar Nutritional Supplement Market Continues To Expand Globally As Consumers Use ofDocument6 paginiMulti-Billion Dollar Nutritional Supplement Market Continues To Expand Globally As Consumers Use ofDivya ShettyÎncă nu există evaluări
- Healthy Supplements Registration Procedures: Public Health & Safety DepartmentDocument3 paginiHealthy Supplements Registration Procedures: Public Health & Safety DepartmentDivya ShettyÎncă nu există evaluări
- Healthy Supplements Registration Procedures: Public Health & Safety DepartmentDocument3 paginiHealthy Supplements Registration Procedures: Public Health & Safety DepartmentDivya ShettyÎncă nu există evaluări
- Thaumatin Technical Information Sheet ShortDocument7 paginiThaumatin Technical Information Sheet ShortDivya ShettyÎncă nu există evaluări
- Chapter 8: Learning: By, Safa HamdareDocument46 paginiChapter 8: Learning: By, Safa HamdareDivya ShettyÎncă nu există evaluări
- Management of Financial Services AssignmentDocument12 paginiManagement of Financial Services AssignmentDivya ShettyÎncă nu există evaluări
- Project Management AssignmentDocument13 paginiProject Management AssignmentDivya ShettyÎncă nu există evaluări
- Can Computers Replace TeachersDocument26 paginiCan Computers Replace TeachersDivya ShettyÎncă nu există evaluări
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (73)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (120)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Pradeep Kshetrapal - Genius Physics (Class 12) - For IIT-JEE and CBSE 2 - Libgen - LiDocument338 paginiPradeep Kshetrapal - Genius Physics (Class 12) - For IIT-JEE and CBSE 2 - Libgen - Lisujan subediÎncă nu există evaluări
- Differential Settlement at Bridge ApproaDocument5 paginiDifferential Settlement at Bridge ApproaVictor De los ReyesÎncă nu există evaluări
- World Link YolaDocument3 paginiWorld Link YolaHamilton Obando100% (1)
- Application Bright Ideas Education Grant Program For TeachersDocument6 paginiApplication Bright Ideas Education Grant Program For Teachersapi-320983699Încă nu există evaluări
- MHSS ItalyDocument9 paginiMHSS Italyromedic36Încă nu există evaluări
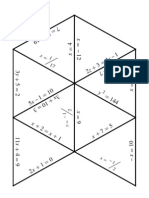
- Algebra1 Review PuzzleDocument3 paginiAlgebra1 Review PuzzleNicholas Yates100% (1)
- Addressing Diversity Through The Years Special and Inclusive EducationDocument6 paginiAddressing Diversity Through The Years Special and Inclusive EducationJiezel SurinÎncă nu există evaluări
- ENIRAM - Guide To Dynamic Trim Optimization 280611 PDFDocument14 paginiENIRAM - Guide To Dynamic Trim Optimization 280611 PDFPhineas MagellanÎncă nu există evaluări
- SH5108 - 5 Occupational Health ProgrammeDocument34 paginiSH5108 - 5 Occupational Health Programmetaaouicha mujahidÎncă nu există evaluări
- KV Class 3 Half Yearly Previous Year Question Paper 2019 ComputerDocument2 paginiKV Class 3 Half Yearly Previous Year Question Paper 2019 Computer02 Aanya Gupta VII CÎncă nu există evaluări
- Union Metal SemiconductorDocument4 paginiUnion Metal SemiconductorskinhugoÎncă nu există evaluări
- Conquering College The Most Fun You Can Have Learning The Things You Need To Know NodrmDocument144 paginiConquering College The Most Fun You Can Have Learning The Things You Need To Know NodrmVithorÎncă nu există evaluări
- NC Error PropagationDocument12 paginiNC Error PropagationSalman KhanÎncă nu există evaluări
- SFN ProfileDocument4 paginiSFN Profiledinesh panchalÎncă nu există evaluări
- Compressor-Less: Historical ApplicationsDocument70 paginiCompressor-Less: Historical Applicationssuryakantshrotriya100% (1)
- Capital Budgeting and Capital Budgeting and Risk Analysis Risk AnalysisDocument16 paginiCapital Budgeting and Capital Budgeting and Risk Analysis Risk AnalysisHaris FendiarÎncă nu există evaluări
- Final FirstpartDocument11 paginiFinal FirstpartLance Johnpaul SyÎncă nu există evaluări
- Template 3 - MATH 3-REGULAR-DIAGNOSTICDocument2 paginiTemplate 3 - MATH 3-REGULAR-DIAGNOSTIClailanie CervantesÎncă nu există evaluări
- History of Computer ReviewerDocument10 paginiHistory of Computer ReviewerNeil Andrew Aliazas78% (9)
- Sect. 4 Tech Docum PC7 AutoLube - 1209 PDFDocument46 paginiSect. 4 Tech Docum PC7 AutoLube - 1209 PDFAlexis MikeÎncă nu există evaluări
- Unit 1Document90 paginiUnit 1Atul Jaysing PatilÎncă nu există evaluări
- Prof Ed 9-A - Module 6 - Tumacder, DHMLDocument6 paginiProf Ed 9-A - Module 6 - Tumacder, DHMLDanica Hannah Mae TumacderÎncă nu există evaluări
- John Hopkins Evidence Table - Systematic ReviewDocument2 paginiJohn Hopkins Evidence Table - Systematic Reviewsandy ThylsÎncă nu există evaluări
- H&M Case Study AssignmentDocument7 paginiH&M Case Study AssignmentwqvyakÎncă nu există evaluări
- PP in Ii 001Document15 paginiPP in Ii 001Dav EipÎncă nu există evaluări
- PC Engineering Undergr 2014Document94 paginiPC Engineering Undergr 2014Austin JamesÎncă nu există evaluări
- SOL-Logarithm, Surds and IndicesDocument12 paginiSOL-Logarithm, Surds and Indicesdevli falduÎncă nu există evaluări
- 2017 Reviving Tribal Tattoo TraditionsDocument3 pagini2017 Reviving Tribal Tattoo Traditions高權梁Încă nu există evaluări
- Engine Torque Settings and Spec's 3.0L V6 SCDocument4 paginiEngine Torque Settings and Spec's 3.0L V6 SCMario MaravillaÎncă nu există evaluări
- Ultimate Electronics - Book - CircuitLabDocument3 paginiUltimate Electronics - Book - CircuitLabEldon50% (2)