S-ar putea să vă placă și
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (345)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
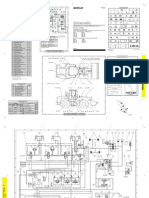
- Caterpillar Cat 279D COMPACT TRACK LOADER (Prefix GTL) Service Repair Manual (GTL00001 and Up) PDFDocument7 paginiCaterpillar Cat 279D COMPACT TRACK LOADER (Prefix GTL) Service Repair Manual (GTL00001 and Up) PDFfksjdnkem0% (2)
- Lady Gaga - The Edge of GloryDocument4 paginiLady Gaga - The Edge of GloryCariss CrosbieÎncă nu există evaluări
- 2011 Regional Clustered Meet November 11Document2 pagini2011 Regional Clustered Meet November 11Blessy Fuesaya TripoliÎncă nu există evaluări
- Arm Specialisation Program UPDATE 2 - Version - 30 - 05 - 2021 NbhcruDocument191 paginiArm Specialisation Program UPDATE 2 - Version - 30 - 05 - 2021 NbhcruVivek LasunaÎncă nu există evaluări
- Automobile Engineering - Lecture Notes, Study Material and Important Questions, AnswersDocument5 paginiAutomobile Engineering - Lecture Notes, Study Material and Important Questions, AnswersM.V. TVÎncă nu există evaluări
- Car UK - January 2021Document149 paginiCar UK - January 2021ofusandeepÎncă nu există evaluări
- Wing Chun TestingDocument9 paginiWing Chun TestingIan100% (1)
- Manual 950GDocument4 paginiManual 950Gabumagico85% (13)
- Balance Bar Design and Motion Analysis of Pushrod: Research PaperDocument4 paginiBalance Bar Design and Motion Analysis of Pushrod: Research PaperParas kapoorÎncă nu există evaluări
- Elan Skis Racing Catalogue 1314 PDFDocument7 paginiElan Skis Racing Catalogue 1314 PDFwest werbeagenturÎncă nu există evaluări
- Proposal For Changes in The Material RegulationDocument14 paginiProposal For Changes in The Material RegulationZeljko TrajilovicÎncă nu există evaluări
- Biology Course Calendar 2020-21Document5 paginiBiology Course Calendar 2020-21Paul MurrayÎncă nu există evaluări
- Parts Manual: Extec Screens and Crushers LTDDocument51 paginiParts Manual: Extec Screens and Crushers LTDBlake Cooley Anderson100% (1)
- Artikel Bahasa Inggris Tentang Kesehatan IDocument3 paginiArtikel Bahasa Inggris Tentang Kesehatan IRestu Yogi Fahlevi100% (2)
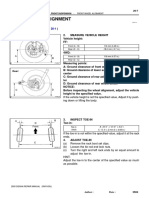
- Wheel AlignmentDocument4 paginiWheel AlignmentdonlynÎncă nu există evaluări
- The Stand User - GM BinderDocument11 paginiThe Stand User - GM BinderJeremiah HodgsonÎncă nu există evaluări
- Breakdown of The $7.2 Million Improvement Plan For Monroe County ParksDocument2 paginiBreakdown of The $7.2 Million Improvement Plan For Monroe County ParksNews 8 WROCÎncă nu există evaluări
- Star Wars d20 - Ultimate Alien AnthologyDocument229 paginiStar Wars d20 - Ultimate Alien Anthologyannabella4497% (37)
- Momets QPDocument8 paginiMomets QPErtuğ ÖzyiğitÎncă nu există evaluări
- Sample Test Paper-2014 For BBA and BBA (Family Business)Document6 paginiSample Test Paper-2014 For BBA and BBA (Family Business)PrashantÎncă nu există evaluări
- Reliant Motors - WikipediaDocument51 paginiReliant Motors - WikipediaEndhy Wisnu NovindraÎncă nu există evaluări
- Janome 6260QCDocument20 paginiJanome 6260QCbianchifanÎncă nu există evaluări
- Softmod Installer Deluxe v5 11 ManualDocument32 paginiSoftmod Installer Deluxe v5 11 ManualWilfredy NunezÎncă nu există evaluări
- Character Sheet - Alternative - Print AaaaaaaaaersionDocument1 paginăCharacter Sheet - Alternative - Print AaaaaaaaaersionChumboÎncă nu există evaluări
- 10th July, 2011Document4 pagini10th July, 2011ZnRosePocÎncă nu există evaluări
- JEP Journal of Exercise PhysiologyDocument7 paginiJEP Journal of Exercise PhysiologykambuaÎncă nu există evaluări
- Emirates A380 PDFDocument1 paginăEmirates A380 PDFNur TangkianÎncă nu există evaluări
- Riva 44' RIVARAMA - Lady MDocument15 paginiRiva 44' RIVARAMA - Lady MskoiperÎncă nu există evaluări
- 5 Elements Qi GongDocument1 pagină5 Elements Qi GongBill HonakerÎncă nu există evaluări
- Pool RulesDocument5 paginiPool RulesVy LovÎncă nu există evaluări