S-ar putea să vă placă și
- Résumé-Cours-Guidage en Rotation - Guidage en Translation PDFDocument62 paginiRésumé-Cours-Guidage en Rotation - Guidage en Translation PDFTaoufik Ben Hadid68% (19)
- Methode Du Portique Equivalent2Document18 paginiMethode Du Portique Equivalent2Onanena FaldiÎncă nu există evaluări
- + TD Transmission 3 Etude ReducteurDocument3 pagini+ TD Transmission 3 Etude ReducteurMahrez ZaafouriÎncă nu există evaluări
- Aide À La Lecture Dun Plan-ProfDocument15 paginiAide À La Lecture Dun Plan-ProfMdzayd EL FahimeÎncă nu există evaluări
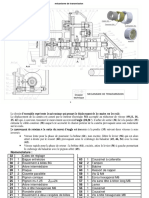
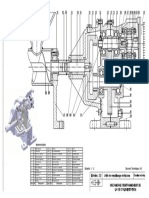
- Sujet 5 Mécanisme de Transmission CorrectionDocument6 paginiSujet 5 Mécanisme de Transmission CorrectionYahya AidaraÎncă nu există evaluări
- Sujet 5 Mecanisme de TransmissionDocument6 paginiSujet 5 Mecanisme de TransmissionBOUREIMA ZOGONAÎncă nu există evaluări
- NomenclatureDocument1 paginăNomenclatureWael MaatougÎncă nu există evaluări
- I. Etude de La Partie Opérative:: 20 DentsDocument3 paginiI. Etude de La Partie Opérative:: 20 DentsGhassen WedÎncă nu există evaluări
- Technique C PDFDocument9 paginiTechnique C PDFAlexandre Le GrandÎncă nu există evaluări
- Sujet 04 - LogoDocument5 paginiSujet 04 - Logohousinmechani1Încă nu există evaluări
- Conception Des Systemes MecaniquesDocument39 paginiConception Des Systemes MecaniquesElgoHoudaÎncă nu există evaluări
- Sujet Corrigé Bac Technique 2018 Tunisie Session PrincipaleDocument52 paginiSujet Corrigé Bac Technique 2018 Tunisie Session PrincipaleReplay VideosÎncă nu există evaluări
- Sujet 35 - LogoDocument7 paginiSujet 35 - LogoAouaida BelgacemÎncă nu există evaluări
- Myriam ORQUERA Conception Des Systemes MecaniquesDocument39 paginiMyriam ORQUERA Conception Des Systemes MecaniquesxevniÎncă nu există evaluări
- Cours - Mécanique Et GréageDocument64 paginiCours - Mécanique Et GréageelwahabininaÎncă nu există evaluări
- TD FinaleDocument8 paginiTD Finalewass princeÎncă nu există evaluări
- RevisionDocument7 paginiRevisionDHia Ben AichaÎncă nu există evaluări
- 08 Maquette Embrayag DisqueDocument5 pagini08 Maquette Embrayag Disquederwiche100% (1)
- CH 0 - Rappels 2016Document57 paginiCH 0 - Rappels 2016MERYEM LAHBOUBÎncă nu există evaluări
- Exo 12 Mobilites SinusmaticDocument11 paginiExo 12 Mobilites SinusmaticSimoMonkad100% (1)
- Correction DPDocument4 paginiCorrection DPkhelifasiwar90Încă nu există evaluări
- 09 Maquette Boite VitessesDocument7 pagini09 Maquette Boite VitessesBrahim Achayfad100% (1)
- Dessin Technique 1Document161 paginiDessin Technique 1esloch100% (1)
- Sujet de Revision C2 1 2024Document6 paginiSujet de Revision C2 1 2024alatarhouni2005Încă nu există evaluări
- Nomenclature: Rep NB Désignation Rep NB DésignationDocument1 paginăNomenclature: Rep NB Désignation Rep NB DésignationMortadha RabahÎncă nu există evaluări
- Dessin D'ensDocument27 paginiDessin D'ensIsrae El AmriÎncă nu există evaluări
- Dessin IndustrielDocument60 paginiDessin IndustrielKhalid Saadaoui100% (6)
- Sujet 29 LogoDocument7 paginiSujet 29 Logohousinmechani1Încă nu există evaluări
- ADM HotDocument8 paginiADM HotDJIBY HOTÎncă nu există evaluări
- Sujet: Système de Production Par PoinçonnageDocument9 paginiSujet: Système de Production Par PoinçonnagefranzÎncă nu există evaluări
- Bts Construction Mecanique Mka 2019 Sujet1Document13 paginiBts Construction Mecanique Mka 2019 Sujet1Bernard Mbotchack100% (1)
- VocabulaireDocument13 paginiVocabulaireHanane Atif100% (1)
- Analyse Fonctionnelle InterneDocument6 paginiAnalyse Fonctionnelle InterneZied MakkiÎncă nu există evaluări
- cours transmissionDocument11 paginicours transmissionezzineÎncă nu există evaluări
- Representation Graphique - Page - Sciences - de - L'ingénieur PDFDocument33 paginiRepresentation Graphique - Page - Sciences - de - L'ingénieur PDFAhmed BidArÎncă nu există evaluări
- EnrenagesDocument4 paginiEnrenagesBouabdellaoui saif ennasrÎncă nu există evaluări
- BOITE-VITESSESDocument3 paginiBOITE-VITESSESfoued chbichibÎncă nu există evaluări
- Ch1 - Modelisation Des Liaisons-Prof Page 3-7Document8 paginiCh1 - Modelisation Des Liaisons-Prof Page 3-7Sheikh Al-shoteriÎncă nu există evaluări
- RDM MadaniDocument45 paginiRDM MadaniSamad TixÎncă nu există evaluări
- DVDocument7 paginiDVlachhelÎncă nu există evaluări
- RCDocument8 paginiRCedem.mejri1920Încă nu există evaluări
- Malaxeur EtuCine1Document4 paginiMalaxeur EtuCine1hhhhhhhhÎncă nu există evaluări
- Série 3 Et Solution - Etau Porte Tube 1Document8 paginiSérie 3 Et Solution - Etau Porte Tube 1imad boussÎncă nu există evaluări
- Représentation D'un Produit FiniDocument21 paginiReprésentation D'un Produit FiniMIMFS100% (2)
- Embr 2020Document4 paginiEmbr 2020Mortadha RabahÎncă nu există evaluări
- Robot Peinture (À, Imprimer) 231024 150655Document8 paginiRobot Peinture (À, Imprimer) 231024 150655namou5836Încă nu există evaluări
- Exercice ReducteurDocument8 paginiExercice ReducteurGyÎncă nu există evaluări
- Cours Chapitre 4-Courbes Et SurfacesDocument43 paginiCours Chapitre 4-Courbes Et Surfacesjounese younseÎncă nu există evaluări
- Dossier Technique 11Document3 paginiDossier Technique 11Mrnadhir Mecanique100% (1)
- Traçage en Chaudronnerie Et Tuyauterie - Raccordement de Deux Sections - Wikilivres PDFDocument104 paginiTraçage en Chaudronnerie Et Tuyauterie - Raccordement de Deux Sections - Wikilivres PDFMariachi Coco Lantoki100% (1)
- POL-ex Soutien P2019Document25 paginiPOL-ex Soutien P2019Ilyas ModestoÎncă nu există evaluări
- Dessin Technique Description Littérale Projections Orthogonales. Points Traités Dans Cette PartieDocument25 paginiDessin Technique Description Littérale Projections Orthogonales. Points Traités Dans Cette PartieFelicia RichardÎncă nu există evaluări
- Sujet 21 - LogoDocument8 paginiSujet 21 - Logohousinmechani1Încă nu există evaluări
- Technique CCCDocument15 paginiTechnique CCCNÖÚ HÄÎncă nu există evaluări
- Mod 2 DtproDocument9 paginiMod 2 DtproÖzledim ZeynepÎncă nu există evaluări
- Dossier Technique Truelle Bg39Document13 paginiDossier Technique Truelle Bg39michelÎncă nu există evaluări
- Devoir À La Maison N°1Document7 paginiDevoir À La Maison N°1Taieb BentaherÎncă nu există evaluări
- App3 Rep STE STM SMB PDFDocument10 paginiApp3 Rep STE STM SMB PDFNSANGOUÎncă nu există evaluări
- QCM Outillage EleveDocument4 paginiQCM Outillage ElevehachichaÎncă nu există evaluări
- Manuel d'apprentissage de la programmation 3D: avec C#5, WPF et Visual Studio 2013De la EverandManuel d'apprentissage de la programmation 3D: avec C#5, WPF et Visual Studio 2013Încă nu există evaluări
- BoshDocument199 paginiBoshTaoufik Ben HadidÎncă nu există evaluări
- Chap 2 Les Embrayages GM2 ENIBDocument23 paginiChap 2 Les Embrayages GM2 ENIBTaoufik Ben HadidÎncă nu există evaluări
- Poly GM3Document21 paginiPoly GM3Taoufik Ben HadidÎncă nu există evaluări
- Procédés de Moulage - Diapos PDFDocument22 paginiProcédés de Moulage - Diapos PDFTaoufik Ben HadidÎncă nu există evaluări
- MMC Art Et Métier Paris-Tech PDFDocument88 paginiMMC Art Et Métier Paris-Tech PDFTaoufik Ben Hadid100% (3)
- Rapport de StageDocument59 paginiRapport de StageFarid Abdul Ogbe50% (2)
- Ais 2122 2apic S1 C3 PCDocument2 paginiAis 2122 2apic S1 C3 PCRayan BouhouchyÎncă nu există evaluări
- Foucault - 339 Qu'est-Ce Que Les LumieresDocument9 paginiFoucault - 339 Qu'est-Ce Que Les LumieresMartín MacíasÎncă nu există evaluări
- 10 Espaces ConfinésDocument28 pagini10 Espaces ConfinésNATAMAÎncă nu există evaluări
- 02 - Physiologie BactérienneDocument44 pagini02 - Physiologie Bactériennebouchakour meryem100% (1)
- Signal Électrique Et ÉlectroniqueDocument13 paginiSignal Électrique Et ÉlectroniqueLittl LotusÎncă nu există evaluări
- Add ExamenDocument5 paginiAdd ExamenOuakrim YounesÎncă nu există evaluări
- Cours 2 - RADIOBIOLOGIE Parties 3 Et 4Document51 paginiCours 2 - RADIOBIOLOGIE Parties 3 Et 412052000Încă nu există evaluări
- Chapitre 4 Les Procedes de FreinageDocument11 paginiChapitre 4 Les Procedes de FreinageSamroura YessadÎncă nu există evaluări
- Cite Radieuse Diane Sarah Moussaoui Rayane Laissani Randa Grp7Document26 paginiCite Radieuse Diane Sarah Moussaoui Rayane Laissani Randa Grp7Diane Sarah100% (1)
- Documentation Excel Formation LogistiqueDocument52 paginiDocumentation Excel Formation Logistiquepeter wilderson josephÎncă nu există evaluări
- 2013 09 Antilles Exo2 Correction Ibuprofene 11ptsDocument2 pagini2013 09 Antilles Exo2 Correction Ibuprofene 11ptsMarwan AzertyÎncă nu există evaluări
- IMIPENEMEDocument26 paginiIMIPENEMELinaMimosaÎncă nu există evaluări
- WDD1690071J434791Document2 paginiWDD1690071J434791Med BazÎncă nu există evaluări
- ADDOHA Presentation FinalDocument61 paginiADDOHA Presentation FinalBorki HibaÎncă nu există evaluări
- Théorème de ThalèsDocument9 paginiThéorème de ThalèsSebastien mutudiemuÎncă nu există evaluări
- Analyse Par CPGSM Des Essences Automobiles Et de Condensat Issus Du Pétrole Brut Algérien.Document120 paginiAnalyse Par CPGSM Des Essences Automobiles Et de Condensat Issus Du Pétrole Brut Algérien.ALIÎncă nu există evaluări
- Version Finale Transport PF - 2Document113 paginiVersion Finale Transport PF - 2pamy26250100% (1)
- Charte Tourisme DurableDocument4 paginiCharte Tourisme DurableMed SaksikÎncă nu există evaluări
- 4 LES TECHNIQUES DEMPREINTE EN PPA. DR KASSOURI L.FDocument51 pagini4 LES TECHNIQUES DEMPREINTE EN PPA. DR KASSOURI L.FImoona iiÎncă nu există evaluări
- NIE PARC VENDANT DES MATERIAUX DE CONSTRUCTION Sept 2020 (Réparé) (Réparé)Document59 paginiNIE PARC VENDANT DES MATERIAUX DE CONSTRUCTION Sept 2020 (Réparé) (Réparé)Mohamed LamraniÎncă nu există evaluări
- 03 Generalites Sur Les FonctionsDocument18 pagini03 Generalites Sur Les FonctionsJunior Le Pyromane100% (1)
- AnalyseMultivarieeDonneesGeographiques PDFDocument144 paginiAnalyseMultivarieeDonneesGeographiques PDFDouaa ImpératriceÎncă nu există evaluări
- Chapitre 3 Politique PrixDocument3 paginiChapitre 3 Politique PrixIhssane MouliÎncă nu există evaluări
- QPSADocument48 paginiQPSAOmar MakhloufÎncă nu există evaluări
- La DensitéDocument5 paginiLa Densité213020 213020Încă nu există evaluări
- L'historique Des Banques Marocaines Et Du Secteur BancaireDocument6 paginiL'historique Des Banques Marocaines Et Du Secteur BancaireKarim El100% (1)
- VSM Ev91Document21 paginiVSM Ev91zouaoua slimaneÎncă nu există evaluări