S-ar putea să vă placă și
- Control of DC Motor Using Different Control StrategiesDe la EverandControl of DC Motor Using Different Control StrategiesÎncă nu există evaluări
- Modeling a Bus Suspension System Transfer FunctionDocument23 paginiModeling a Bus Suspension System Transfer FunctionHelios FlaresÎncă nu există evaluări
- Control Tutorials For MATLAB and Simulink - Suspension - System ModelingDocument2 paginiControl Tutorials For MATLAB and Simulink - Suspension - System Modelingcesarinigillas50% (2)
- Vehicle Dynamics, Handling and Simulation AnalysisDocument109 paginiVehicle Dynamics, Handling and Simulation AnalysisSeshan R.VÎncă nu există evaluări
- Cam MechDocument24 paginiCam MechmarcglebÎncă nu există evaluări
- Vibration AnalysisDocument25 paginiVibration AnalysisHarshal Avinash MungikarÎncă nu există evaluări
- Car Suspension Over BumpDocument23 paginiCar Suspension Over BumpVairasivam Karisna KumarÎncă nu există evaluări
- Control SystemsDocument160 paginiControl SystemsPintu DeyÎncă nu există evaluări
- Presentation FatigueDocument22 paginiPresentation FatigueRavi Kiran MeesalaÎncă nu există evaluări
- Free Vibration of Hysterically Damped Bridge StructureDocument7 paginiFree Vibration of Hysterically Damped Bridge StructureDaniel CBÎncă nu există evaluări
- Elements of Mechatronics: V. ThulasikanthDocument46 paginiElements of Mechatronics: V. ThulasikanthNeela MuraliÎncă nu există evaluări
- Shaft Misalignment and Vibration - A ModelDocument13 paginiShaft Misalignment and Vibration - A ModelPeak NeoÎncă nu există evaluări
- 250+ TOP MCQs On Types of Valves and AnswersDocument6 pagini250+ TOP MCQs On Types of Valves and Answersahmadreza777Încă nu există evaluări
- Emission TestsDocument30 paginiEmission TestsBoobalakrishnan A R MoorthyÎncă nu există evaluări
- Fsae Suspension Design Brazil StyleDocument10 paginiFsae Suspension Design Brazil StyleRahulVMuralidharanÎncă nu există evaluări
- Mechatronics Application and System DesignDocument10 paginiMechatronics Application and System Designswap1983Încă nu există evaluări
- Journal Bearings Lecture0Document84 paginiJournal Bearings Lecture0Khaled HassanÎncă nu există evaluări
- Voith Hydro BulbDocument12 paginiVoith Hydro Bulbkamil_canadaÎncă nu există evaluări
- Diff Types of Suspension Used in Automotive Industriesss PDFDocument26 paginiDiff Types of Suspension Used in Automotive Industriesss PDFRahul SharmaÎncă nu există evaluări
- Suspension Design ReportDocument4 paginiSuspension Design ReportMeet MehtaÎncă nu există evaluări
- 3 4 Tenneco Globally Rolls Out An Advanced Spend Analytics Solution Powered by HANA Enterprise Cloud HEC Tenneco FlexoDocument20 pagini3 4 Tenneco Globally Rolls Out An Advanced Spend Analytics Solution Powered by HANA Enterprise Cloud HEC Tenneco FlexoAndric BelÎncă nu există evaluări
- The Industry Standard Engine Simulation ToolDocument4 paginiThe Industry Standard Engine Simulation Toolrudey18Încă nu există evaluări
- Seminar On Supercharger: BY Manhar 15AE60R18Document19 paginiSeminar On Supercharger: BY Manhar 15AE60R18Hatinderpal SinghÎncă nu există evaluări
- Chapter 6Document66 paginiChapter 6Arkew Bogale50% (2)
- Introduction To R.T.P.P: 1.1 GeneralDocument12 paginiIntroduction To R.T.P.P: 1.1 GeneralSairam Kumar ChowdaryÎncă nu există evaluări
- SuspensiondfDocument3 paginiSuspensiondfAhmad UsamaÎncă nu există evaluări
- Variable Length Intake Plenum Improves Engine PerformanceDocument6 paginiVariable Length Intake Plenum Improves Engine PerformancePaulo Wey Costa0% (1)
- Car Dynamics Using Quarter Model and Passive Suspension, PDFDocument9 paginiCar Dynamics Using Quarter Model and Passive Suspension, PDFwelsya100% (1)
- Introduction To Mechanical VibrationsDocument14 paginiIntroduction To Mechanical VibrationsSrivatsava R.Încă nu există evaluări
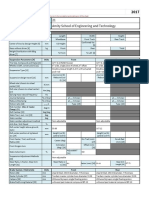
- 2017 FB - Design IC Spec Sheet FinalDocument13 pagini2017 FB - Design IC Spec Sheet FinalashuÎncă nu există evaluări
- Theory of Mechanisms and Machines (Amitabha Ghosh and Asok Kumar Mallik)Document640 paginiTheory of Mechanisms and Machines (Amitabha Ghosh and Asok Kumar Mallik)Manoj SinghÎncă nu există evaluări
- Geometry of Screw Compressor Rotors and Their ToolsDocument17 paginiGeometry of Screw Compressor Rotors and Their ToolsPhox IndiaÎncă nu există evaluări
- MEEM 4220 GT-POWER Final Project Requirements and DeliverablesDocument7 paginiMEEM 4220 GT-POWER Final Project Requirements and DeliverablesMustafa OzcelikÎncă nu există evaluări
- IC Engines & Reciprocating Machines GuideDocument73 paginiIC Engines & Reciprocating Machines Guideahmed jemalÎncă nu există evaluări
- Qip Ice 31 Stirling EnginesDocument20 paginiQip Ice 31 Stirling EnginesChetanPrajapatiÎncă nu există evaluări
- Bma4723 Vehicle Dynamics Chap 5Document31 paginiBma4723 Vehicle Dynamics Chap 5Fu HongÎncă nu există evaluări
- Modelling and Simulation of Half Car Suspension System With A MRDDocument6 paginiModelling and Simulation of Half Car Suspension System With A MRDgurudev001Încă nu există evaluări
- Robotic Arm Micro Controller ProjectDocument13 paginiRobotic Arm Micro Controller Projectroyal1979Încă nu există evaluări
- Kinetic Energy Recovery System SeminarDocument33 paginiKinetic Energy Recovery System SeminarNaveenÎncă nu există evaluări
- Vibration Analysis of Forced Harmonic OscillationDocument19 paginiVibration Analysis of Forced Harmonic OscillationRakesh BhaskerÎncă nu există evaluări
- IndyCar Chassis Dimensions GuideDocument4 paginiIndyCar Chassis Dimensions GuideKarthikeyan NavaneethakrishnanÎncă nu există evaluări
- 1) Effect of Engine Speed On Intake Valve Flow Characteristics of A Diesel EngineDocument6 pagini1) Effect of Engine Speed On Intake Valve Flow Characteristics of A Diesel EnginefitriasyrafÎncă nu există evaluări
- Vibration AnalysisDocument4 paginiVibration AnalysisJournalNX - a Multidisciplinary Peer Reviewed JournalÎncă nu există evaluări
- V.Senthil Me WWW - Chennaituitions.in: Page 1 of 6Document6 paginiV.Senthil Me WWW - Chennaituitions.in: Page 1 of 6saranyakathiravan100% (1)
- Vehicle Body Engineering: Bus Body DetailsDocument12 paginiVehicle Body Engineering: Bus Body DetailsAnant ShivÎncă nu există evaluări
- Seminar PPT On Pollution Less EngineDocument24 paginiSeminar PPT On Pollution Less Engineashwin41732Încă nu există evaluări
- Vehicle Suspension Modeling NotesDocument25 paginiVehicle Suspension Modeling Notesahmetlutfu100% (2)
- TOM - Understanding Flywheel Function and Turning Moment DiagramsDocument62 paginiTOM - Understanding Flywheel Function and Turning Moment DiagramsSudarson KarthikeyanÎncă nu există evaluări
- SKF GreaseDocument3 paginiSKF GreaseKumar SwamiÎncă nu există evaluări
- Hovercraft Synopsis by Shivam AggarwalDocument8 paginiHovercraft Synopsis by Shivam Aggarwalshivam agarwalÎncă nu există evaluări
- Peak FitDocument295 paginiPeak FitirinaÎncă nu există evaluări
- Flow in The CylinderDocument24 paginiFlow in The CylinderFernando AndradeÎncă nu există evaluări
- Semester Project: Automotive Suspension SystemDocument14 paginiSemester Project: Automotive Suspension SystemAmmar AhmedÎncă nu există evaluări
- Precision Machine DesignDocument56 paginiPrecision Machine DesignFelipe Soares MaiaÎncă nu există evaluări
- Two Way Slab ExampleDocument14 paginiTwo Way Slab ExampleKryle Dayle VillanuevaÎncă nu există evaluări
- Automatic Bus Suspension PID Controller DesignDocument50 paginiAutomatic Bus Suspension PID Controller Designchuhuynh100% (1)
- Inverted Pendulum ControleDocument14 paginiInverted Pendulum Controleabdulrehman6677Încă nu există evaluări
- Automatic Voltage RegulatorsDocument35 paginiAutomatic Voltage RegulatorsAlejandroHerreraGurideChileÎncă nu există evaluări
- MATLAB Bus SuspensionDocument6 paginiMATLAB Bus SuspensionBluecloud Krishnan100% (3)
- Intelligent Braking System Literature ReviewDocument39 paginiIntelligent Braking System Literature ReviewRaj WagdariÎncă nu există evaluări
- General Description: Digital Temperature ControllerDocument6 paginiGeneral Description: Digital Temperature ControllerMohamed MaherÎncă nu există evaluări
- Lab 5 ControlDocument15 paginiLab 5 ControlFgj JhgÎncă nu există evaluări
- User Manual MAM 6070 - V01Document25 paginiUser Manual MAM 6070 - V01Dareje Wabee78% (9)
- Section 2 Diagnostic MethodsDocument36 paginiSection 2 Diagnostic MethodsLuis FisherÎncă nu există evaluări
- I-PD Controller TuningDocument10 paginiI-PD Controller TuningAfonso AlbuquerqueÎncă nu există evaluări
- Setting up a temperature controllerDocument3 paginiSetting up a temperature controlleristanbulian100% (1)
- Controlador MCCDocument4 paginiControlador MCCJuan RiosÎncă nu există evaluări
- Chapter 11 Design by Root LocusDocument17 paginiChapter 11 Design by Root Locusأسامة الشرعبيÎncă nu există evaluări
- Especificaciones Tecnicas Regulador StrongDocument15 paginiEspecificaciones Tecnicas Regulador StrongLuis Miguel Taco CorredorÎncă nu există evaluări
- Mat Lab PresentationDocument6 paginiMat Lab PresentationShivamÎncă nu există evaluări
- Teppo LuukkonenDocument32 paginiTeppo LuukkonenVIJAYPUTRAÎncă nu există evaluări
- e-ISSN: 2320-0847 p-ISSN: 2320-0936 Volume-02, Issue-12, pp-75-82Document8 paginie-ISSN: 2320-0847 p-ISSN: 2320-0936 Volume-02, Issue-12, pp-75-82AJER JOURNALÎncă nu există evaluări
- Vision-Based Guidance and Navigation For Autonomous MAV in Indoor EnvironmentDocument5 paginiVision-Based Guidance and Navigation For Autonomous MAV in Indoor EnvironmentDRathikaÎncă nu există evaluări
- Vacon NXP Grid Converter ARFIFF03V164 Manual DPD01599C UK - V001Document185 paginiVacon NXP Grid Converter ARFIFF03V164 Manual DPD01599C UK - V001hunt huntÎncă nu există evaluări
- Process Control FundamentalsDocument73 paginiProcess Control Fundamentalsshashank715100% (1)
- Evolution of BMS and HVAC SystemsDocument41 paginiEvolution of BMS and HVAC Systemsanas shehabiÎncă nu există evaluări
- Process Control-Thomas E MarlinDocument1.026 paginiProcess Control-Thomas E MarlinDhini Cibilz80% (10)
- AN899 Brushless DC Motor Control Using PIC18FXX31 MCUsDocument26 paginiAN899 Brushless DC Motor Control Using PIC18FXX31 MCUssquelch1Încă nu există evaluări
- Fundamentals of Process Control Theory ThirdEd - Murrill - TOCDocument4 paginiFundamentals of Process Control Theory ThirdEd - Murrill - TOCVíctor Daniel Parra Mateo100% (1)
- Irjet V2i8242 PDFDocument6 paginiIrjet V2i8242 PDFAhmed Osama MikawiÎncă nu există evaluări
- Control Valve Questions PDFDocument106 paginiControl Valve Questions PDFRio_xxxÎncă nu există evaluări
- Pid ControlDocument34 paginiPid Controlciocioi iancuÎncă nu există evaluări
- Design of Indirect MRAS-based Adaptive Control SystemsDocument5 paginiDesign of Indirect MRAS-based Adaptive Control SystemsThiện DũngÎncă nu există evaluări
- 8VZZ002310T0001 - ABB UNITROL - 1000 - Brochure - EN - 2019Document16 pagini8VZZ002310T0001 - ABB UNITROL - 1000 - Brochure - EN - 2019muhammad hasan azharÎncă nu există evaluări
- Control Valve Interview QuestionDocument17 paginiControl Valve Interview QuestionQamar Hassan IqbalÎncă nu există evaluări
- Spartan Controls LTD Field Trouble Shooting GuideDocument48 paginiSpartan Controls LTD Field Trouble Shooting Guideyaseen alshreefÎncă nu există evaluări
- GS Ys1500Document20 paginiGS Ys1500Esen HawerÎncă nu există evaluări
- Control Systems MCQs - Standard Test SignalsDocument20 paginiControl Systems MCQs - Standard Test SignalsVarsha Amol Gathe0% (1)
- NHA2414 Lecture 1-1 Module IntroductionDocument18 paginiNHA2414 Lecture 1-1 Module Introductionpriom ahmedÎncă nu există evaluări