S-ar putea să vă placă și
- Función de Transferencia Pulso PDFDocument10 paginiFunción de Transferencia Pulso PDFalberto rojasÎncă nu există evaluări
- Criterios de Estabilidad JURYDocument13 paginiCriterios de Estabilidad JURYDavid NietoÎncă nu există evaluări
- Error en Estado EstacionarioDocument18 paginiError en Estado EstacionarioDaniela CruzÎncă nu există evaluări
- Variables de EstadoDocument59 paginiVariables de EstadoJuan Carlos ElectroTecÎncă nu există evaluări
- Transformada Z (Informe Ieee) .1Document6 paginiTransformada Z (Informe Ieee) .1misusibuÎncă nu există evaluări
- Ejercicios de Asignacion de PolosDocument2 paginiEjercicios de Asignacion de PolossamirpcÎncă nu există evaluări
- Metodos de Solucion de Sistemas Discretyos. FiltrosDocument9 paginiMetodos de Solucion de Sistemas Discretyos. FiltrosacajahuaringaÎncă nu există evaluări
- Guía de Ejercicios Prueba N°2Document1 paginăGuía de Ejercicios Prueba N°2Esbany Lanchipa SanchezÎncă nu există evaluări
- Modelado Matemático de Sistemas DinámicosDocument19 paginiModelado Matemático de Sistemas Dinámicospiwy017Încă nu există evaluări
- Problemas Control Moderno Resuelto (Discreto)Document11 paginiProblemas Control Moderno Resuelto (Discreto)Karol SaenzÎncă nu există evaluări
- Analogias Electricas PDFDocument14 paginiAnalogias Electricas PDFFlor Barcia VeraÎncă nu există evaluări
- Ejercicios Con ScilabDocument33 paginiEjercicios Con Scilabjrmonteb100% (1)
- Modelado de Sistemas DinámicosDocument44 paginiModelado de Sistemas DinámicosJUAN4201Încă nu există evaluări
- PFSense MultiWan Redundacia y Balanceo de CargasDocument7 paginiPFSense MultiWan Redundacia y Balanceo de Cargasmarcos_pazÎncă nu există evaluări
- Examenes Rae 0708Document40 paginiExamenes Rae 0708Milton Fonseca ZuritaÎncă nu există evaluări
- Analisis de Sistemas Dinamicos 1 PDFDocument87 paginiAnalisis de Sistemas Dinamicos 1 PDFJessica Tafur100% (2)
- 0 Manual de LaboratorioDocument54 pagini0 Manual de LaboratorioJuan Martín Castro100% (1)
- Dinámica InversaDocument0 paginiDinámica InversaPatricio GalarceÎncă nu există evaluări
- Guia ETS - Teoría Del Control 2Document10 paginiGuia ETS - Teoría Del Control 2Kevin GuerreroÎncă nu există evaluări
- Modelos Matematicos y Funciones de TransferenciaDocument12 paginiModelos Matematicos y Funciones de TransferenciaFHERFFFÎncă nu există evaluări
- Control AutomaticoDocument451 paginiControl AutomaticomanueldidyÎncă nu există evaluări
- Practica 2 LAB DSP Senales y Sistemas DiscretosDocument7 paginiPractica 2 LAB DSP Senales y Sistemas DiscretosRaissaPazVasquezÎncă nu există evaluări
- Ejemplo Proyecto GrafcetDocument72 paginiEjemplo Proyecto GrafcetFlavio100% (1)
- Laboratorio5 1LX 231Document22 paginiLaboratorio5 1LX 231jorgeÎncă nu există evaluări
- Discretización Con ZohDocument30 paginiDiscretización Con ZohRenzo Jovani Pardo Urbano100% (1)
- Funciones Transfer en CIA de PulsosDocument7 paginiFunciones Transfer en CIA de PulsosFabian Gerardo Vallejo JimenezÎncă nu există evaluări
- Guia ETS - Modelado de Sistemas - MAFB PDFDocument6 paginiGuia ETS - Modelado de Sistemas - MAFB PDFMisael VPÎncă nu există evaluări
- Sistema Ball and Beam Modelado y Simulación PresentacionDocument18 paginiSistema Ball and Beam Modelado y Simulación PresentacionGregory Cárdenas-MansillaÎncă nu există evaluări
- Ieee6o2 I2 RuedachristianDocument10 paginiIeee6o2 I2 RuedachristianChristian RuedaÎncă nu există evaluări
- Señales en MatlabDocument13 paginiSeñales en MatlabserfaryÎncă nu există evaluări
- Problemas Tema 2 Señales y SistemasDocument7 paginiProblemas Tema 2 Señales y Sistemasvictor141516Încă nu există evaluări
- Examen Sistemas de Control Digital 2014Document18 paginiExamen Sistemas de Control Digital 2014Ruben ToledoÎncă nu există evaluări
- Modelado en El Espacio de EstadosDocument5 paginiModelado en El Espacio de EstadosGuardado EduardoÎncă nu există evaluări
- Modelo, Pendulo InvertidoDocument9 paginiModelo, Pendulo InvertidoJose VillamizarÎncă nu există evaluări
- Sistemas de Control Digital 3 PDFDocument203 paginiSistemas de Control Digital 3 PDFIngeniero Jeffer Maya SanchezÎncă nu există evaluări
- Primer Informe MT517 19 2Document17 paginiPrimer Informe MT517 19 2André RoblesÎncă nu există evaluări
- Tipos de Sistemas de ControlDocument5 paginiTipos de Sistemas de ControlErick PonceÎncă nu există evaluări
- Control-II Lab 1Document3 paginiControl-II Lab 1HenrySolórzanoMartelÎncă nu există evaluări
- Solucionario de La PC1Document12 paginiSolucionario de La PC1Baki HanmaÎncă nu există evaluări
- Importancia Delta Dirac ADCDocument25 paginiImportancia Delta Dirac ADCMax100% (1)
- ObservadorDocument40 paginiObservadorJosé Eduardo ChairezÎncă nu există evaluări
- Práctica de Controlabilidad y ObservabilidadDocument15 paginiPráctica de Controlabilidad y ObservabilidadsantiagoÎncă nu există evaluări
- Ecuaciones DiferencialesDocument237 paginiEcuaciones DiferencialesMarito100% (1)
- E-322 Final-Mod1 PLC AvanzadoDocument130 paginiE-322 Final-Mod1 PLC AvanzadoHéctor CaríasÎncă nu există evaluări
- Solucion Fase 1 Parte Teórica CONTROL DIGITALDocument13 paginiSolucion Fase 1 Parte Teórica CONTROL DIGITALM cardona100% (4)
- TP1 - Linealización de Sistemas No LinealesDocument13 paginiTP1 - Linealización de Sistemas No LinealesNaufrago WilliesÎncă nu există evaluări
- Análisis Temporal de Sistemas ContinuosDocument56 paginiAnálisis Temporal de Sistemas ContinuosJuan GallardoÎncă nu există evaluări
- Dinamica Control PDFDocument18 paginiDinamica Control PDFabdallah lachguerÎncă nu există evaluări
- Modelado de Circuitos ElectricosDocument30 paginiModelado de Circuitos Electricosjlola100% (1)
- Sistemas Discretos de Lazo CerradoDocument6 paginiSistemas Discretos de Lazo CerradoAntonio Sanjuanero Herrera100% (1)
- Tema1 Proceso de BernoulliDocument10 paginiTema1 Proceso de BernoulliglpiÎncă nu există evaluări
- 4 CAPITULO 2 Modelamiento DinamicoDocument32 pagini4 CAPITULO 2 Modelamiento DinamicoJuanManuelHurtadoValdiviaÎncă nu există evaluări
- Uso de SISOTOOL para Diseño de ControlesDocument35 paginiUso de SISOTOOL para Diseño de ControlesFernando Uzategui GutierrezÎncă nu există evaluări
- Practica Sobre El Analizador de EspectrosDocument2 paginiPractica Sobre El Analizador de EspectrosDiego RodriguezÎncă nu există evaluări
- TP4 Am4 22Document4 paginiTP4 Am4 22ijfejÎncă nu există evaluări
- Modelado Con EDODocument12 paginiModelado Con EDOCristian Almaraz RochaÎncă nu există evaluări
- Tarea Quiero El ArchivoDocument55 paginiTarea Quiero El ArchivoRaul Perez LandaÎncă nu există evaluări
- AGA Virtual - Unidad 5Document53 paginiAGA Virtual - Unidad 5PedroCruzdePiedraÎncă nu există evaluări
- Guiones Física I 3V 2021 - 2022Document38 paginiGuiones Física I 3V 2021 - 2022CSIC OTOÎncă nu există evaluări
- Nuevo Reglamento ITSEDocument353 paginiNuevo Reglamento ITSEMarcelino ZarateÎncă nu există evaluări
- Licencia KeyDocument1 paginăLicencia KeyMarcelino ZarateÎncă nu există evaluări
- Cableado EstructuradoDocument201 paginiCableado EstructuradoMarcelino ZarateÎncă nu există evaluări
- Pabellon de Odontologia - Tercer Nivel - EscenarioDocument12 paginiPabellon de Odontologia - Tercer Nivel - EscenarioMarcelino ZarateÎncă nu există evaluări
- 37 Paper Analisis Transitorio Con Laviu (1) .En - EsDocument10 pagini37 Paper Analisis Transitorio Con Laviu (1) .En - EsMarcelino ZarateÎncă nu există evaluări
- Manual Autolibre de Sistemas AC EnpowerDocument23 paginiManual Autolibre de Sistemas AC EnpowerMarcelino Zarate100% (3)
- Para El Sistema en Media TensiónDocument1 paginăPara El Sistema en Media TensiónMarcelino ZarateÎncă nu există evaluări
- Peligro SismicoDocument53 paginiPeligro SismicoMarcelino ZarateÎncă nu există evaluări
- Formato Informe PyP Final!!!Document15 paginiFormato Informe PyP Final!!!ANDREA JULIANA OLMOS ROJASÎncă nu există evaluări
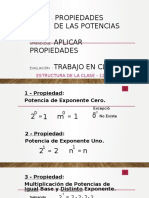
- 03 Propiedades de Las PotenciasDocument21 pagini03 Propiedades de Las PotenciasDavid Esteban Quezada MieresÎncă nu există evaluări
- Caso 2Document1 paginăCaso 2Horizonte CruzÎncă nu există evaluări
- Aportes Psicologia de La SexualidadDocument3 paginiAportes Psicologia de La SexualidadJulieth CardenasÎncă nu există evaluări
- NTC574 PDFDocument9 paginiNTC574 PDFEl NomoÎncă nu există evaluări
- Cadena de Custodia SueloDocument1 paginăCadena de Custodia SueloÑ. Alexannder Del Aguila Santiago100% (2)
- Clase 19 Con ClavesDocument42 paginiClase 19 Con ClavesMarco Malle MoraÎncă nu există evaluări
- Catálogo Gyol 2013Document22 paginiCatálogo Gyol 2013Greg Anthony ReaÎncă nu există evaluări
- Plan de EmergenciaDocument18 paginiPlan de EmergenciaLookims BerserkerÎncă nu există evaluări
- Analisis Precios Unitarios Extraordinarios Delg CuauhtemocDocument72 paginiAnalisis Precios Unitarios Extraordinarios Delg Cuauhtemocpablo sumayaÎncă nu există evaluări
- ANALISIS DE PRECIOS UNITARIOS-ing NavarroDocument85 paginiANALISIS DE PRECIOS UNITARIOS-ing NavarroMax Lenin Ticona CondoriÎncă nu există evaluări
- Costos 7.21 - 7.27Document5 paginiCostos 7.21 - 7.27ÁNGELO MOISÉS OBREGÓN GUILLERMOÎncă nu există evaluări
- Almacén Fiscal VideoDocument2 paginiAlmacén Fiscal VideoGabriela Aguilar0% (1)
- Amplificadores Operacionales PDFDocument5 paginiAmplificadores Operacionales PDFDaniel SolisÎncă nu există evaluări
- Condicionamiento Operante (Skinner)Document15 paginiCondicionamiento Operante (Skinner)Nicole HernándezÎncă nu există evaluări
- Diccionario Cheli - Francisco UmbralDocument196 paginiDiccionario Cheli - Francisco UmbralDanny Garcia Juarez100% (1)
- IEI R4 4 Daily RoutinesDocument5 paginiIEI R4 4 Daily RoutinesC HÎncă nu există evaluări
- Informe de Gestión Cualitativo y Cuantitativoformato12102020Document6 paginiInforme de Gestión Cualitativo y Cuantitativoformato12102020yeximarÎncă nu există evaluări
- Presentación DPMDocument15 paginiPresentación DPMClaudia DiazÎncă nu există evaluări
- AcademiaDocument473 paginiAcademiafelipeÎncă nu există evaluări
- 08 Morseteria 230911Document18 pagini08 Morseteria 230911Luis Francisco Calderon EspinozaÎncă nu există evaluări
- Aniversario de La Universidad CantutaDocument12 paginiAniversario de La Universidad CantutaAlcantaraSusyÎncă nu există evaluări
- Propiedades Medicinales de La RudaDocument3 paginiPropiedades Medicinales de La RudaRaymdn Cruz QuispeÎncă nu există evaluări
- BLANQUEODocument3 paginiBLANQUEOjotachuquiÎncă nu există evaluări
- CAPÍTULO III TIVECA CFDocument7 paginiCAPÍTULO III TIVECA CFCarlos IseaÎncă nu există evaluări
- Cuaderno de Tercero de Eso Educacic3b3n Afectivo SexualDocument50 paginiCuaderno de Tercero de Eso Educacic3b3n Afectivo Sexualedwin5152Încă nu există evaluări
- ACELERACIONDocument6 paginiACELERACIONDaniel PacabÎncă nu există evaluări
- Práctica 3 Movimiento ParabólicoDocument4 paginiPráctica 3 Movimiento ParabólicoyourokiÎncă nu există evaluări
- CaratulaDocument92 paginiCaratulamilon abrahamÎncă nu există evaluări
- 04.05.2021 Haro AvalosDocument2 pagini04.05.2021 Haro Avalosanthony rodriguezÎncă nu există evaluări