S-ar putea să vă placă și
- Auto-Transformer Design - A Practical Handbook for Manufacturers, Contractors and WiremenDe la EverandAuto-Transformer Design - A Practical Handbook for Manufacturers, Contractors and WiremenEvaluare: 4 din 5 stele4/5 (2)
- Walt Kester, Joe Buxton: Section 5 Battery ChargersDocument25 paginiWalt Kester, Joe Buxton: Section 5 Battery Chargersarde50Încă nu există evaluări
- CT PT SpecificationDocument31 paginiCT PT SpecificationRitesh JaiswalÎncă nu există evaluări
- 7VK61xx Manual A3 V041100 enDocument332 pagini7VK61xx Manual A3 V041100 enthilakkumaeee100% (1)
- HV CB For SubstationDocument28 paginiHV CB For SubstationjokotsÎncă nu există evaluări
- 36kV SF6 Gas Circuit Breaker Type SFG Mitsubishi ElectricDocument3 pagini36kV SF6 Gas Circuit Breaker Type SFG Mitsubishi ElectricSunil G Parakkal100% (1)
- LM-390A Operation Manual in EnglishDocument75 paginiLM-390A Operation Manual in Englishbart05260% (1)
- 132 Testing - CTDocument1 pagină132 Testing - CTSantosh GairheÎncă nu există evaluări
- 400 KB Circuit Breaker Installation Pro6Document24 pagini400 KB Circuit Breaker Installation Pro6sanjayÎncă nu există evaluări
- Tripping Relay Bistable Relays RXMD 1 RXMD 2Document10 paginiTripping Relay Bistable Relays RXMD 1 RXMD 2M Kashif JunaidÎncă nu există evaluări
- Slip Ring Motor Liquid Resistor Soft Starting System (HV-LRS) PDFDocument4 paginiSlip Ring Motor Liquid Resistor Soft Starting System (HV-LRS) PDFLouie FernandezÎncă nu există evaluări
- Ccum 21Document4 paginiCcum 21Hari Krishna.MÎncă nu există evaluări
- Power Systems Protection Course: Al-Balqa Applied UniversityDocument37 paginiPower Systems Protection Course: Al-Balqa Applied Universityrodruren01Încă nu există evaluări
- CIGRE-Over Head Line Fault LocatorDocument13 paginiCIGRE-Over Head Line Fault LocatorcontenteeeÎncă nu există evaluări
- Upptcl Training (Ee)Document27 paginiUpptcl Training (Ee)AakashÎncă nu există evaluări
- Canada Power Sf6Document22 paginiCanada Power Sf6alfonso.parkerÎncă nu există evaluări
- Unitrol 6080 Excitation Systems: Proven Flexible SolutionsDocument12 paginiUnitrol 6080 Excitation Systems: Proven Flexible SolutionsEkanit ChuaykoedÎncă nu există evaluări
- Tap Changer DetailsDocument12 paginiTap Changer Detailsbpd21100% (1)
- Trefoil Formation Related IssuesDocument2 paginiTrefoil Formation Related IssuesdphegartyÎncă nu există evaluări
- Biecco Lawrie Ece Gec Reyrolle Burn Jyoti SwitchgearDocument18 paginiBiecco Lawrie Ece Gec Reyrolle Burn Jyoti SwitchgearSharafat AliÎncă nu există evaluări
- CT For Protection: Prof.O.V.Gnana SwathikaDocument24 paginiCT For Protection: Prof.O.V.Gnana SwathikaSarthak VatsÎncă nu există evaluări
- 7SG15 MicroTAPP Complete Technical ManualDocument104 pagini7SG15 MicroTAPP Complete Technical ManualththeeÎncă nu există evaluări
- Catalogue - 40.5kV T Type OVCB PDFDocument20 paginiCatalogue - 40.5kV T Type OVCB PDFGanesh Duraisamy0% (1)
- ABB DisconnectorDocument8 paginiABB DisconnectoridundoviÎncă nu există evaluări
- 02 DT - Short CircuitDocument2 pagini02 DT - Short CircuitMahyar MashayekhiÎncă nu există evaluări
- 400 KV Metal Oxide Surge Arrestor CigreDocument12 pagini400 KV Metal Oxide Surge Arrestor CigreDilip ARÎncă nu există evaluări
- Valence Training BrochureDocument12 paginiValence Training Brochurerodruren100% (1)
- ABB 11KV Vmax VCB CatalogueDocument40 paginiABB 11KV Vmax VCB CatalogueDan Juson60% (5)
- Easypact Cvs 2011engDocument84 paginiEasypact Cvs 2011engthiago_gomes7953Încă nu există evaluări
- Undertaking Letter For Test On Optical Fiber CablesDocument1 paginăUndertaking Letter For Test On Optical Fiber CablesAmbuj SaxenaÎncă nu există evaluări
- CB Testing SCOPE Compatibility ModeDocument58 paginiCB Testing SCOPE Compatibility ModeVepty whoops100% (1)
- Disconnector Contact Condition PDFDocument130 paginiDisconnector Contact Condition PDFipraoÎncă nu există evaluări
- VIZIMAX - CIGRE Toronto - Using A Controlled Switching Device For A Power Transformer PDFDocument8 paginiVIZIMAX - CIGRE Toronto - Using A Controlled Switching Device For A Power Transformer PDFgeorge_cpp2Încă nu există evaluări
- ACS800-04 HW ManualDocument132 paginiACS800-04 HW Manualmodelador3dÎncă nu există evaluări
- MHOA04 MHOB04 MHOC04 SalesenDocument16 paginiMHOA04 MHOB04 MHOC04 Salesendreamsky702243Încă nu există evaluări
- Medium Voltage Induction Motor Protection and Diagnostics: Yi Du Pinjia Zhang Prof. Thomas G. HabetlerDocument61 paginiMedium Voltage Induction Motor Protection and Diagnostics: Yi Du Pinjia Zhang Prof. Thomas G. HabetlervladalucarDÎncă nu există evaluări
- Transformer BhelDocument17 paginiTransformer BhelAayushiÎncă nu există evaluări
- Nuisance TrippingDocument6 paginiNuisance TrippingSeindahNyaÎncă nu există evaluări
- Electromagnetic Relays - ManiDocument17 paginiElectromagnetic Relays - ManipraveenaprabhuÎncă nu există evaluări
- Basics of Load CentersDocument98 paginiBasics of Load Centersvda0904Încă nu există evaluări
- CT CVT LaDocument66 paginiCT CVT LaMidhun VargheseÎncă nu există evaluări
- 1Document35 pagini1apsÎncă nu există evaluări
- 400kv Final PPT by MayankDocument20 pagini400kv Final PPT by MayankMayank Mishra83% (12)
- Unit-I Circuit BreakersDocument13 paginiUnit-I Circuit Breakerspurushg62Încă nu există evaluări
- MD32-TM: Percentage Biased Transformer Differential RelayDocument5 paginiMD32-TM: Percentage Biased Transformer Differential RelaySandeep DeodharÎncă nu există evaluări
- HV Equipment Failure Data 2017Document164 paginiHV Equipment Failure Data 2017ipraoÎncă nu există evaluări
- Interpretation of Sweep Frequency Response AnalysiDocument8 paginiInterpretation of Sweep Frequency Response AnalysiRyan JohnÎncă nu există evaluări
- C&R Panel (Without Automation) - Aug, 2016Document73 paginiC&R Panel (Without Automation) - Aug, 2016apsÎncă nu există evaluări
- Type P8n, PQ8n, PN8n: Auxiliary RelayDocument7 paginiType P8n, PQ8n, PN8n: Auxiliary RelayDinesh ThevanÎncă nu există evaluări
- ALSTOM Relay CatalogueDocument112 paginiALSTOM Relay CatalogueVivek Vous AimeÎncă nu există evaluări
- 7SA522 CatalogueDocument53 pagini7SA522 Cataloguetayson2002Încă nu există evaluări
- Knowledge is "Real Power": Introduction to Power QualityDe la EverandKnowledge is "Real Power": Introduction to Power QualityÎncă nu există evaluări
- Advances in High Voltage Insulation and Arc Interruption in SF6 and VacuumDe la EverandAdvances in High Voltage Insulation and Arc Interruption in SF6 and VacuumÎncă nu există evaluări
- Arc Control in Circuit Breakers: Low Contact Velocity 2nd EditionDe la EverandArc Control in Circuit Breakers: Low Contact Velocity 2nd EditionÎncă nu există evaluări
- The Technology of Instrument Transformers: Current and Voltage Measurement and Insulation SystemsDe la EverandThe Technology of Instrument Transformers: Current and Voltage Measurement and Insulation SystemsÎncă nu există evaluări
- Real-Time Simulation Technology for Modern Power ElectronicsDe la EverandReal-Time Simulation Technology for Modern Power ElectronicsÎncă nu există evaluări
- Josep M. Guerrero Public CVDocument52 paginiJosep M. Guerrero Public CVAn00pgadzillaÎncă nu există evaluări
- Position/Job Title B2B Sales Grade Reporting To (Position) Business UnitDocument2 paginiPosition/Job Title B2B Sales Grade Reporting To (Position) Business UnitAn00pgadzillaÎncă nu există evaluări
- Experiment No. 1 Schrage MotorDocument4 paginiExperiment No. 1 Schrage MotorAn00pgadzilla100% (2)
- Lecture 10: Power-Flow Studies: Instructor: Dr. Gleb V. Tcheslavski Contact: Office HoursDocument28 paginiLecture 10: Power-Flow Studies: Instructor: Dr. Gleb V. Tcheslavski Contact: Office HoursAn00pgadzillaÎncă nu există evaluări
- Synchronous Machines-Part 0Document49 paginiSynchronous Machines-Part 0An00pgadzillaÎncă nu există evaluări
- 3-Ph Induction Motor Upto Circle DiagramDocument36 pagini3-Ph Induction Motor Upto Circle DiagramAn00pgadzilla100% (1)
- Friends 1x01 - The One Where Monica Gets A RoommateDocument61 paginiFriends 1x01 - The One Where Monica Gets A RoommateCatalin Stelian-ShanksÎncă nu există evaluări
- Oru Oman DataDocument1 paginăOru Oman DataVishnu SudarsananÎncă nu există evaluări
- Arc 400 CommanderDocument1 paginăArc 400 Commandermanoj_doshi_10% (1)
- TS2431 - Adjustable Shunt Voltage ReferenceDocument16 paginiTS2431 - Adjustable Shunt Voltage ReferenceRob BrabantÎncă nu există evaluări
- CEP02N65D/CEB02N65D CEF02N65D: N-Channel Enhancement Mode Field Effect Transistor FeaturesDocument4 paginiCEP02N65D/CEB02N65D CEF02N65D: N-Channel Enhancement Mode Field Effect Transistor FeatureswilmanÎncă nu există evaluări
- Build A Low Cost & Simple Magnetic PulserDocument36 paginiBuild A Low Cost & Simple Magnetic PulserWb Warnabrother Hatchet100% (1)
- Lic Report 14 - 4 Final2Document12 paginiLic Report 14 - 4 Final2Harshvardhan MishraÎncă nu există evaluări
- Esp Micro ProjectDocument22 paginiEsp Micro ProjectRohit PatilÎncă nu există evaluări
- IEEE 34 Node Test Feeder With Induction GeneratorsDocument2 paginiIEEE 34 Node Test Feeder With Induction Generatorsjaach78Încă nu există evaluări
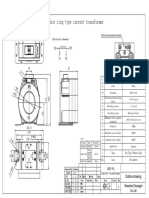
- Outdoor Ring Type Current Transformer: Electrical SchematicDocument1 paginăOutdoor Ring Type Current Transformer: Electrical SchematicWalter EguizabalÎncă nu există evaluări
- Problem 1: (5 Points) : (0.75 Point) (0.75 Point)Document4 paginiProblem 1: (5 Points) : (0.75 Point) (0.75 Point)tahermohÎncă nu există evaluări
- Kiessling Overhead Power Lines Planning Design ConstructionDocument396 paginiKiessling Overhead Power Lines Planning Design ConstructionSead Saric100% (14)
- Apfc147 - 1 Phase: Automatic Power Factor ControllerDocument2 paginiApfc147 - 1 Phase: Automatic Power Factor ControllerAlejandro Mira Estrada0% (1)
- CMOS Circuit LayoutDocument4 paginiCMOS Circuit LayoutAbhijeet KumarÎncă nu există evaluări
- Week 11 - Fundamentals of Distribution SystemsDocument39 paginiWeek 11 - Fundamentals of Distribution SystemsEstika Vriscilla GintingÎncă nu există evaluări
- MP2x8i NMEA Buffer: Installation and User ManualDocument2 paginiMP2x8i NMEA Buffer: Installation and User ManualAbdul Wajid MÎncă nu există evaluări
- Ficha Técnica Led Flood Light Ad-Tg385-75wDocument3 paginiFicha Técnica Led Flood Light Ad-Tg385-75wVidal RubénÎncă nu există evaluări
- 11 KV Power Cable Site Test Report: (NMGR103 To NMGR104)Document3 pagini11 KV Power Cable Site Test Report: (NMGR103 To NMGR104)Gajendran SriramÎncă nu există evaluări
- Low Drop Dual Power Operational Amplifiers: DescriptionDocument10 paginiLow Drop Dual Power Operational Amplifiers: DescriptionAmirÎncă nu există evaluări
- SMD 357Document6 paginiSMD 357Marcoantonio AntonioÎncă nu există evaluări
- BBRP Trip - 220kv SwitcyardDocument2 paginiBBRP Trip - 220kv SwitcyardBala VivekanandanÎncă nu există evaluări
- Minivac 601Document211 paginiMinivac 601ok18879Încă nu există evaluări
- Table 4d4aDocument2 paginiTable 4d4aZunnur ZamzamÎncă nu există evaluări
- 1 - Spark Star-01 33KV TrippingDocument1 pagină1 - Spark Star-01 33KV TrippingRam Dhani YadavÎncă nu există evaluări
- 40ET14A0 B PDFDocument109 pagini40ET14A0 B PDFbaggo81Încă nu există evaluări
- Slayer Exciter CircuitDocument2 paginiSlayer Exciter CircuitRalph VaronÎncă nu există evaluări
- TMEIC Drives Offer Complete Coverage: Low and Medium Voltage Drive Specifi CationsDocument2 paginiTMEIC Drives Offer Complete Coverage: Low and Medium Voltage Drive Specifi CationsDevas ShuklaÎncă nu există evaluări
- User Guide: NICE9000-V Series Integrated Villa Elevator Control CabinetDocument2 paginiUser Guide: NICE9000-V Series Integrated Villa Elevator Control CabinetyanlayÎncă nu există evaluări
- Physics II Problems PDFDocument1 paginăPhysics II Problems PDFBOSS BOSS100% (1)
- HVSI804W WGD 61Document6 paginiHVSI804W WGD 61mnezamiÎncă nu există evaluări
- GPT13N50 / GPT13N50D: General Description FeaturesDocument6 paginiGPT13N50 / GPT13N50D: General Description FeaturesalejandroÎncă nu există evaluări