S-ar putea să vă placă și
- Damped Oscillations and Resonance: Serway 15.6, 15.7Document14 paginiDamped Oscillations and Resonance: Serway 15.6, 15.7Vikram YadavÎncă nu există evaluări
- Dynamic Characteristics: Input Signal X (T) Output Signal y (T)Document29 paginiDynamic Characteristics: Input Signal X (T) Output Signal y (T)veenadivyakishÎncă nu există evaluări
- Interactions between Electromagnetic Fields and Matter: Vieweg Tracts in Pure and Applied PhysicsDe la EverandInteractions between Electromagnetic Fields and Matter: Vieweg Tracts in Pure and Applied PhysicsÎncă nu există evaluări
- Easy(er) Electrical Principles for Extra Class Ham License (2012-2016)De la EverandEasy(er) Electrical Principles for Extra Class Ham License (2012-2016)Încă nu există evaluări
- Dynamic Charactorstics of An InstrumentsDocument30 paginiDynamic Charactorstics of An InstrumentsDhinakaran VeemanÎncă nu există evaluări
- Pass Ultrasound Physics Exam Study Guide ReviewDe la EverandPass Ultrasound Physics Exam Study Guide ReviewEvaluare: 4.5 din 5 stele4.5/5 (2)
- Ch7 FourierTransform Continuous-Time Signal AnalysisDocument43 paginiCh7 FourierTransform Continuous-Time Signal AnalysisNat RajÎncă nu există evaluări
- 7-1 (FIR Filter Design)Document56 pagini7-1 (FIR Filter Design)안창용[학생](전자정보대학 전자공학과)Încă nu există evaluări
- Forced Vibration LabDocument8 paginiForced Vibration LabIlman Faiq100% (2)
- Free VibrationDocument8 paginiFree VibrationPrakash DuraisamyÎncă nu există evaluări
- 4 Review Response Arbitrary ExcitationDocument17 pagini4 Review Response Arbitrary ExcitationTanay ChoudharyÎncă nu există evaluări
- Mechanical Vibration Forced UndampedDocument19 paginiMechanical Vibration Forced UndampedShafiq ShapianÎncă nu există evaluări
- Vibration Sec 1Document6 paginiVibration Sec 1Andy LimÎncă nu există evaluări
- The Interaction of Light and Matter: and N: Refractive IndexDocument31 paginiThe Interaction of Light and Matter: and N: Refractive IndexFarizalÎncă nu există evaluări
- Section 1 Review of FundamentalsDocument23 paginiSection 1 Review of FundamentalsShrikrishna BirajdarÎncă nu există evaluări
- Free Vibration With Coulomb Damping Examples: With Many Figures and Models From Mechanical Vibrations, S. S. RaoDocument20 paginiFree Vibration With Coulomb Damping Examples: With Many Figures and Models From Mechanical Vibrations, S. S. RaoMihir AsharÎncă nu există evaluări
- Response of First Order System in Various InputDocument23 paginiResponse of First Order System in Various InputDonna Joy Mallari100% (1)
- Free Vibration of Single-Degree-Of-freedom SystemsDocument7 paginiFree Vibration of Single-Degree-Of-freedom SystemsShafiq ShajaÎncă nu există evaluări
- 2nd Order ExampleDocument25 pagini2nd Order ExampleMagdy RiadÎncă nu există evaluări
- Control Systems AssignmentDocument10 paginiControl Systems AssignmentBrightÎncă nu există evaluări
- Lab 3Document21 paginiLab 3Nurul Anati ZulkifliÎncă nu există evaluări
- Forced Vibrations: K KX CX F XDocument178 paginiForced Vibrations: K KX CX F XGhanshyam Barhate100% (2)
- A. Course Reader Lecture NotesDocument177 paginiA. Course Reader Lecture Noteszhitao wangÎncă nu există evaluări
- CH 2Document32 paginiCH 2HFÎncă nu există evaluări
- SDOF - Free VibrationDocument12 paginiSDOF - Free VibrationPaul Bryan GuanÎncă nu există evaluări
- Vibration LNnotesDocument15 paginiVibration LNnotes13lmh1Încă nu există evaluări
- Simple Harmonic MotionDocument23 paginiSimple Harmonic Motionanand007krishnanÎncă nu există evaluări
- Section 1 Review of Fundamentals: S1-1 NAS122, Section 1, January 2004 2004 MSC - Software CorporationDocument26 paginiSection 1 Review of Fundamentals: S1-1 NAS122, Section 1, January 2004 2004 MSC - Software CorporationroylmechÎncă nu există evaluări
- H2.4.3-Damped Harmonic VibrationDocument2 paginiH2.4.3-Damped Harmonic VibrationMD NayeemÎncă nu există evaluări
- OdeDocument10 paginiOde林格屹Încă nu există evaluări
- Mechanical Vibration PDFDocument51 paginiMechanical Vibration PDFEric Kerr100% (1)
- Homogenous Sol (Transient Decay)Document7 paginiHomogenous Sol (Transient Decay)MuhammadÎncă nu există evaluări
- Chapter 3 - MatlabDocument59 paginiChapter 3 - MatlabZe SaÎncă nu există evaluări
- Complex Exponential Fourier SeriesDocument7 paginiComplex Exponential Fourier SeriessaurabhÎncă nu există evaluări
- MV Forced Vibrations NotesDocument51 paginiMV Forced Vibrations NotesalokÎncă nu există evaluări
- VA&C - UNIT - II (Part-Two)Document107 paginiVA&C - UNIT - II (Part-Two)Dame AyaneÎncă nu există evaluări
- Ae Lab ManualDocument52 paginiAe Lab ManualaryakalekattuÎncă nu există evaluări
- DamperDocument4 paginiDampertamasinekÎncă nu există evaluări
- DOM M S D F Harmonical Excited Vibration 1Document90 paginiDOM M S D F Harmonical Excited Vibration 1Prajapati DhavalÎncă nu există evaluări
- Chapter 1 - Introduction To Mechanical Vibrations PDFDocument13 paginiChapter 1 - Introduction To Mechanical Vibrations PDFLuchito CtÎncă nu există evaluări
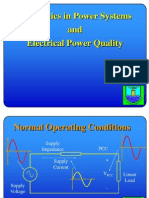
- Harmonics in Power Systems and Electrical Power Quality: Abcdefghij KLDocument57 paginiHarmonics in Power Systems and Electrical Power Quality: Abcdefghij KLFatih GürdalÎncă nu există evaluări
- Linear FilteringDocument23 paginiLinear FilteringCristian Jozeph SahetapyÎncă nu există evaluări
- Fourier Analysis of Signals and SystemsDocument24 paginiFourier Analysis of Signals and SystemsBabul IslamÎncă nu există evaluări
- Response of An Undamped SystemDocument6 paginiResponse of An Undamped SystemWacko AsahanÎncă nu există evaluări
- Vibration Reference.: Timoshenko MedalistDocument15 paginiVibration Reference.: Timoshenko MedalistChandra ClarkÎncă nu există evaluări
- Forced Damped Oscillator: Experiment 7Document5 paginiForced Damped Oscillator: Experiment 7Manas ChaturvediÎncă nu există evaluări
- C3 Forced Vibration BGDocument11 paginiC3 Forced Vibration BGLâm KhanhÎncă nu există evaluări
- Measurement Techniques - Lesson04Document58 paginiMeasurement Techniques - Lesson04Umut ŞENÎncă nu există evaluări
- Communication IITN Review1Document28 paginiCommunication IITN Review1Pankaj MeenaÎncă nu există evaluări
- Physics Mid-Sem CompilationDocument220 paginiPhysics Mid-Sem Compilationdhruv goraiÎncă nu există evaluări
- Instrumentation and Product Testing: Dynamic Characteristics of Measurement SystemDocument25 paginiInstrumentation and Product Testing: Dynamic Characteristics of Measurement SystemCircuit ControlarÎncă nu există evaluări
- Forced-Vibration Response: Forced - Vibration Harmonic Loading Periodic Loading Impulsive Loading General Dynamic LoadingDocument15 paginiForced-Vibration Response: Forced - Vibration Harmonic Loading Periodic Loading Impulsive Loading General Dynamic LoadingChí Khang ĐặngÎncă nu există evaluări
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)De la EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)Încă nu există evaluări
- Harnessing Bistable Structural Dynamics: For Vibration Control, Energy Harvesting and SensingDe la EverandHarnessing Bistable Structural Dynamics: For Vibration Control, Energy Harvesting and SensingÎncă nu există evaluări
- Fundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsDe la EverandFundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsÎncă nu există evaluări
- Introductory Differential Equations: with Boundary Value Problems, Student Solutions Manual (e-only)De la EverandIntroductory Differential Equations: with Boundary Value Problems, Student Solutions Manual (e-only)Încă nu există evaluări