S-ar putea să vă placă și
- Que Es La Teoria de La Relatividad - Landau PDFDocument42 paginiQue Es La Teoria de La Relatividad - Landau PDFamarvuthaÎncă nu există evaluări
- Algebra Lineal (Jesus Rojo)Document81 paginiAlgebra Lineal (Jesus Rojo)Jose Leonel Rosas Quintana50% (2)
- Documento Completo PDFDocument324 paginiDocumento Completo PDFLeddin ItuÎncă nu există evaluări
- Manual CCBB Álgebra Lineal PLAN 2010Document29 paginiManual CCBB Álgebra Lineal PLAN 2010Luis Miguel Zuñiga MartinezÎncă nu există evaluări
- Resumen Álgebra Lineal (Completo)Document20 paginiResumen Álgebra Lineal (Completo)pedroÎncă nu există evaluări
- Alarcon APUNTES EDPDocument246 paginiAlarcon APUNTES EDPaxel_oscÎncă nu există evaluări
- Ejercicios Resueltos DiagonalizacionDocument13 paginiEjercicios Resueltos Diagonalizacion1MONOGRAFIAS75% (8)
- Derivadas ParcialesDocument195 paginiDerivadas ParcialesJuan Francisco Javier Sepúlveda Vergara100% (3)
- Conicas (Rotacion Via Diagonalizacion de La Forma CuadraticaDocument6 paginiConicas (Rotacion Via Diagonalizacion de La Forma CuadraticaCristian SilvaÎncă nu există evaluări
- Foucault Microfisica Del PoderDocument140 paginiFoucault Microfisica Del PoderSociedad Que AprendeÎncă nu există evaluări
- Temario Exam MSC 2011Document4 paginiTemario Exam MSC 2011Carl AlbÎncă nu există evaluări
- Cap 9Document18 paginiCap 9lilianaÎncă nu există evaluări
- EconometríaDocument23 paginiEconometríaErm RmÎncă nu există evaluări
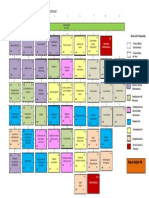
- Mapa MECANICA 2014Document1 paginăMapa MECANICA 2014erickÎncă nu există evaluări
- Disponibilidad Nuevo FormatoDocument1 paginăDisponibilidad Nuevo FormatoCarl AlbÎncă nu există evaluări
- Carl Sagan - La Carga Del EscepticismoDocument16 paginiCarl Sagan - La Carga Del EscepticismoShian MartinezÎncă nu există evaluări
- Oferta Educativa Ene - Jun 2020 IEDocument1 paginăOferta Educativa Ene - Jun 2020 IECarl AlbÎncă nu există evaluări
- Oferta Educativa Ene - Jun 2020 IMDocument2 paginiOferta Educativa Ene - Jun 2020 IMCarl AlbÎncă nu există evaluări
- Proceso de Cambio de AdscripcionDocument6 paginiProceso de Cambio de AdscripcionCarl AlbÎncă nu există evaluări
- Oferta educativa enero-junio 2019 ingeniería electrónicaDocument2 paginiOferta educativa enero-junio 2019 ingeniería electrónicaCarl AlbÎncă nu există evaluări
- Mapa Curricular de Ingenieria en Control y ComputacionDocument1 paginăMapa Curricular de Ingenieria en Control y ComputacionCarl AlbÎncă nu există evaluări
- Lista de Participantes Seminario Bjj2020Document1 paginăLista de Participantes Seminario Bjj2020Carl AlbÎncă nu există evaluări
- 3 3 GeologiaDocument1 pagină3 3 GeologiaCarl AlbÎncă nu există evaluări
- ElectricidadDocument90 paginiElectricidadCarl AlbÎncă nu există evaluări
- Tema 7 Derivadas e IntegralesDocument37 paginiTema 7 Derivadas e IntegralesVictor GarciaÎncă nu există evaluări
- 1 Campos de Vectores y Sistemas Dinámicos en R NDocument34 pagini1 Campos de Vectores y Sistemas Dinámicos en R NCarl AlbÎncă nu există evaluări
- Circ U Lode MohrDocument16 paginiCirc U Lode MohrFrancisco PerezÎncă nu există evaluări
- Dinámica de Sistemas PDFDocument11 paginiDinámica de Sistemas PDFMisael PiñaÎncă nu există evaluări
- IntegralindefinidaDocument20 paginiIntegralindefinidaJorgeÎncă nu există evaluări
- Examen 2 Dic06Document2 paginiExamen 2 Dic06Carl AlbÎncă nu există evaluări
- Integral Sustitucion TrigonometricaDocument3 paginiIntegral Sustitucion TrigonometricaMarie AndersonÎncă nu există evaluări
- Ejercicios de Ecuacion de La Onda 2011Document6 paginiEjercicios de Ecuacion de La Onda 2011Carl AlbÎncă nu există evaluări
- Calculo IntegralDocument24 paginiCalculo IntegralCarl AlbÎncă nu există evaluări
- Eledic 08Document2 paginiEledic 08Jenny Andreina ArboledaÎncă nu există evaluări
- 6º ElectroestaticaDocument40 pagini6º ElectroestaticaJose EliasÎncă nu există evaluări
- 3 CAPITULO IV 2 Sem 14 Vectores PropiosDocument19 pagini3 CAPITULO IV 2 Sem 14 Vectores PropiosFernando Daniel Mamani MamaniÎncă nu există evaluări
- Tema 04 Am G DiagonalizacionDocument12 paginiTema 04 Am G Diagonalizacionangie zillanteÎncă nu există evaluări
- Autovalores y autovectores de matricesDocument8 paginiAutovalores y autovectores de matricesvmgataÎncă nu există evaluări
- Ciclo 01 Ieln Álgebra LinealDocument7 paginiCiclo 01 Ieln Álgebra LinealRicardo asÎncă nu există evaluări
- Practica de Algebra LinealDocument4 paginiPractica de Algebra LinealbraikapoÎncă nu există evaluări
- Apuntes As Lade (Algebra Lineal) Curso 2005-2006Document45 paginiApuntes As Lade (Algebra Lineal) Curso 2005-2006Gabi Recinos Sandoval100% (1)
- Tema 2. Ejercicios. Transformaciones Lineales. Procesos Secuenciales Lineales.Document2 paginiTema 2. Ejercicios. Transformaciones Lineales. Procesos Secuenciales Lineales.Paula Gómez Martínez100% (1)
- Aplicación diagonalización ingenieríaDocument3 paginiAplicación diagonalización ingenieríaTekaReyesÎncă nu există evaluări
- Vectores y Valores PropiossDocument12 paginiVectores y Valores PropiossYolber EscÎncă nu există evaluări
- Teoria Diagonalizacion de MatricesDocument9 paginiTeoria Diagonalizacion de MatricesRaúl Romero TámaraÎncă nu există evaluări
- Tarea 4 Valores y Vectotes Propios1 1Document2 paginiTarea 4 Valores y Vectotes Propios1 1Junior CedeñoÎncă nu există evaluări
- Temas Cuarto Parcial LinealDocument21 paginiTemas Cuarto Parcial LinealMATEO ALVAREZ MADRIGALÎncă nu există evaluări
- MAT105 Álgebra LinealDocument23 paginiMAT105 Álgebra LinealMahonri GarciaÎncă nu există evaluări
- Diagonalización de Matrices en RDocument23 paginiDiagonalización de Matrices en RIsabelCalisayaÎncă nu există evaluări
- DiagonalizacionDocument26 paginiDiagonalizacionSakae TakedaÎncă nu există evaluări
- Matrices Semejantes y DiagonalizaciónDocument9 paginiMatrices Semejantes y DiagonalizaciónNestor Gomez100% (1)
- Guía Diagonalización-2016-2Document4 paginiGuía Diagonalización-2016-2Ignacio Barría LlancaÎncă nu există evaluări
- Autovalores y Autovectores - EjercitaciónDocument5 paginiAutovalores y Autovectores - Ejercitaciónste menÎncă nu există evaluări
- Diagonalizacion de Matrices Simetricas y Transformaciones OrtogonalesDocument8 paginiDiagonalizacion de Matrices Simetricas y Transformaciones OrtogonalesFrancois GPxÎncă nu există evaluări
- Examen Matemáticas I Ingeniería MecánicaDocument1 paginăExamen Matemáticas I Ingeniería MecánicacarmenÎncă nu există evaluări
- Examen de Álgebra lineal con 5 problemas de teoría, espacios vectoriales, diagonalización, ortonormalización y transformaciones linealesDocument1 paginăExamen de Álgebra lineal con 5 problemas de teoría, espacios vectoriales, diagonalización, ortonormalización y transformaciones linealesadrian lazarte0% (1)
- Clases de Matrices - Parte 01Document71 paginiClases de Matrices - Parte 01Paul TelloÎncă nu există evaluări
- Recetario Control 3 Álgebra LinealDocument7 paginiRecetario Control 3 Álgebra LinealMatias ValenzuelaÎncă nu există evaluări
- Tema 5Document18 paginiTema 5Nancy VargasÎncă nu există evaluări
- Prácticas MathematicaDocument12 paginiPrácticas MathematicaCristina PinoÎncă nu există evaluări