S-ar putea să vă placă și
- EDDL or FDT-DTM PDFDocument7 paginiEDDL or FDT-DTM PDFmarioÎncă nu există evaluări
- Yokogawa PRM IntegrationDocument75 paginiYokogawa PRM IntegrationvirgilÎncă nu există evaluări
- Fieldbus Basics PDFDocument37 paginiFieldbus Basics PDFsalic2013Încă nu există evaluări
- Rockwell Automation Library of Process P - PIDEDocument70 paginiRockwell Automation Library of Process P - PIDEjuanjovm77Încă nu există evaluări
- DeltaV Opc MatlabIntegrationDocument12 paginiDeltaV Opc MatlabIntegrationedcocuÎncă nu există evaluări
- Control Load Station B0700ax - JDocument62 paginiControl Load Station B0700ax - JtecnoradsÎncă nu există evaluări
- Invensys Foxboro PDFDocument20 paginiInvensys Foxboro PDFPustinjak SaharicÎncă nu există evaluări
- Flow Boss 107 Flow MangerDocument9 paginiFlow Boss 107 Flow Mangervaibhavdate10Încă nu există evaluări
- ANSI-IsA-60079-27 Fieldbus Intrinsically Safe Concept (FISCO) and FieldbusDocument35 paginiANSI-IsA-60079-27 Fieldbus Intrinsically Safe Concept (FISCO) and FieldbusManuel Carvajal GrajalesÎncă nu există evaluări
- 2018 Laboratorio 01 DCS FCS Hardware DCSDocument22 pagini2018 Laboratorio 01 DCS FCS Hardware DCSPercyRoy Ramos RodriguezÎncă nu există evaluări
- Instrumentation CoursesDocument2 paginiInstrumentation CoursesAbdul LateefÎncă nu există evaluări
- DeltaV SIS With Electronic Marshalling Hardware Reference Guide PDFDocument115 paginiDeltaV SIS With Electronic Marshalling Hardware Reference Guide PDFQuayo Deejay100% (1)
- FlowCheck User ManualDocument88 paginiFlowCheck User Manualrobercl51Încă nu există evaluări
- 21 A 0 A 1 B 1Document12 pagini21 A 0 A 1 B 1mtansa68Încă nu există evaluări
- TRICON Product Spec PDFDocument78 paginiTRICON Product Spec PDFUdaya Kumar Krishnan100% (1)
- FOUNDATION™ Fieldbus Book A TutorialDocument70 paginiFOUNDATION™ Fieldbus Book A TutorialasimozmaÎncă nu există evaluări
- Aspen DMCplus Online ToolsDocument2 paginiAspen DMCplus Online Toolspartho143Încă nu există evaluări
- Deltav SD Plus Controller (2010)Document6 paginiDeltav SD Plus Controller (2010)Hamza SaiÎncă nu există evaluări
- Introduction DCS System r1Document44 paginiIntroduction DCS System r1jalilÎncă nu există evaluări
- DS 34-705-API 670 Machinery Protection SystemsDocument6 paginiDS 34-705-API 670 Machinery Protection SystemsandhucaosÎncă nu există evaluări
- HART FilterDocument4 paginiHART Filtertriminhdang_phar6701Încă nu există evaluări
- PID de Controlador AmericanoDocument100 paginiPID de Controlador Americanocristopher Moriano100% (1)
- ISA StandardsDocument3 paginiISA Standardschandushar1604Încă nu există evaluări
- Curso Diseño - HMI-ISA PDFDocument32 paginiCurso Diseño - HMI-ISA PDFjoeldupar100% (2)
- WP - DeltaV Operate Themes PDFDocument18 paginiWP - DeltaV Operate Themes PDFJorge Vargas100% (1)
- Manual and Feedback ControlDocument36 paginiManual and Feedback Controlesakkiraj1590Încă nu există evaluări
- New TDC CBT 100Document267 paginiNew TDC CBT 100Gabriela VelazquezÎncă nu există evaluări
- 9720097-008 Safety Considerations Guide For Tricon v9-v10 Systems PDFDocument116 pagini9720097-008 Safety Considerations Guide For Tricon v9-v10 Systems PDFRiva BonanoÎncă nu există evaluări
- DeltaV RTU ConnectDocument24 paginiDeltaV RTU ConnectWalter MaradonaÎncă nu există evaluări
- Pactware Manual 1Document240 paginiPactware Manual 1bangiful100% (1)
- PID Control System Analysis, Design and TechnologyDocument38 paginiPID Control System Analysis, Design and TechnologyMuhammad Usman GhaniÎncă nu există evaluări
- Practical System TipsDocument208 paginiPractical System TipsmaikonrangelÎncă nu există evaluări
- HartDocument25 paginiHartTirado Melchor Angel MiguelÎncă nu există evaluări
- View Selection Guide PDFDocument56 paginiView Selection Guide PDFJorge AlvearÎncă nu există evaluări
- 9720098-008 Tri Station 1131 Libraries Reference (Jun 09)Document456 pagini9720098-008 Tri Station 1131 Libraries Reference (Jun 09)diegosa28100% (1)
- S3 Common FunctionsDocument54 paginiS3 Common Functionsplim5ollÎncă nu există evaluări
- B0193ax3 N (Function Block)Document712 paginiB0193ax3 N (Function Block)Jack YenÎncă nu există evaluări
- B0750ap - D System ManagerDocument328 paginiB0750ap - D System ManagerSreedhar Avula100% (1)
- TN66Document6 paginiTN66Raja BalasubramaniamÎncă nu există evaluări
- FSC Maintenance and Support Services: Safety Management SystemsDocument2 paginiFSC Maintenance and Support Services: Safety Management Systemsmemt0% (1)
- DCS Configuration, Hardware & SofwareDocument37 paginiDCS Configuration, Hardware & SofwareEngineer Naeem AkhtarÎncă nu există evaluări
- Trusted Field Loop ConfigurationDocument56 paginiTrusted Field Loop Configurationjaysonlkh100% (1)
- PRM Backup RestoreDocument10 paginiPRM Backup RestoreatifÎncă nu există evaluări
- Centum VP 5 Eng Control PgmsglobalDocument36 paginiCentum VP 5 Eng Control PgmsglobalfaqdaniÎncă nu există evaluări
- KB 51770 Lab Manual - VBA Converting RSView32Document42 paginiKB 51770 Lab Manual - VBA Converting RSView32Pablo Herson Black Rodriguez EliasÎncă nu există evaluări
- Foundation Fieldbus DCS SpecDocument19 paginiFoundation Fieldbus DCS Specsairam2234100% (3)
- DeviceNet TroubleshootingDocument15 paginiDeviceNet TroubleshootingBocefaloÎncă nu există evaluări
- Exp Station PINDocument9 paginiExp Station PINKhalid AliÎncă nu există evaluări
- EBM White PaperDocument12 paginiEBM White PapermcaffeyÎncă nu există evaluări
- Steam Turbine Control Solutions: FeaturesDocument4 paginiSteam Turbine Control Solutions: Featuresmsw123Încă nu există evaluări
- Ehpm R2a 2012-08-24Document11 paginiEhpm R2a 2012-08-24Piush KumarÎncă nu există evaluări
- Deltav Embedded Advanced Control: A New Approach To Advanced Control Overview PresentationDocument108 paginiDeltav Embedded Advanced Control: A New Approach To Advanced Control Overview PresentationdeltavblaatÎncă nu există evaluări
- S600 OverviewDocument70 paginiS600 Overviewberry Mike100% (1)
- Product Data Sheet Floboss 107 Flow Manager Fb107 en 132260Document9 paginiProduct Data Sheet Floboss 107 Flow Manager Fb107 en 132260Edvier MapayeÎncă nu există evaluări
- B0700ax WDocument102 paginiB0700ax WBen SahraouiÎncă nu există evaluări
- Process Control System A Complete Guide - 2020 EditionDe la EverandProcess Control System A Complete Guide - 2020 EditionÎncă nu există evaluări
- Distributed Computer Control System: Proceedings of the IFAC Workshop, Tampa, Florida, U.S.A., 2-4 October 1979De la EverandDistributed Computer Control System: Proceedings of the IFAC Workshop, Tampa, Florida, U.S.A., 2-4 October 1979T. J. HarrisonÎncă nu există evaluări
- Project Based Learning IcsDocument14 paginiProject Based Learning IcsAvinash YadavÎncă nu există evaluări
- Lab10 CompletoDocument10 paginiLab10 CompletoLuis Fernando Ramos OlandaÎncă nu există evaluări
- EE 322 Control TheoryDocument37 paginiEE 322 Control TheoryshrnbolonneÎncă nu există evaluări
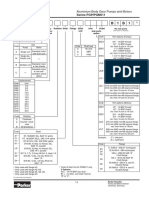
- PG 511 B 1 B 1: Ordering Code Series PGP/PGM511Document7 paginiPG 511 B 1 B 1: Ordering Code Series PGP/PGM511Four SticksÎncă nu există evaluări
- J.M. Hurst Cyclic AnalysisDocument45 paginiJ.M. Hurst Cyclic AnalysisChristian Robinson80% (10)
- Product Management Self-Learning ManualDocument261 paginiProduct Management Self-Learning ManualAbhishek Arekar100% (1)
- SIM BoxingDocument2 paginiSIM Boxingkrishnakant_75Încă nu există evaluări
- EM230 BR BM3 Fitting InstructionsDocument2 paginiEM230 BR BM3 Fitting InstructionsRoman BabaevÎncă nu există evaluări
- Introduction To Wireless Application Protocol (WAP) OGIDocument12 paginiIntroduction To Wireless Application Protocol (WAP) OGIApram SinghÎncă nu există evaluări
- EN 1991-1-4 NA enDocument4 paginiEN 1991-1-4 NA enanuj3936100% (1)
- Antikythera MechanismDocument25 paginiAntikythera MechanismchetansergiurazvanÎncă nu există evaluări
- Online Examination System For AndroidDocument7 paginiOnline Examination System For AndroidSri Sai UniversityÎncă nu există evaluări
- Meai Mar 2010Document36 paginiMeai Mar 2010Daneshwer VermaÎncă nu există evaluări
- Module002 LaboratoryExercise002Document2 paginiModule002 LaboratoryExercise002Joaquin SmithÎncă nu există evaluări
- HiraDocument30 paginiHiravijay kumar singhÎncă nu există evaluări
- Hot Wire Anemometry HandoutDocument4 paginiHot Wire Anemometry HandoutZ-BÎncă nu există evaluări
- Oil & Gas Asset Integrity IssuesDocument15 paginiOil & Gas Asset Integrity Issuesyogolain100% (2)
- Q3 NSP - SLP - RLPDocument41 paginiQ3 NSP - SLP - RLPRushi RavalÎncă nu există evaluări
- Iftekhar Sea Service TestimonialDocument2 paginiIftekhar Sea Service TestimonialTomenko OleksiiÎncă nu există evaluări
- An 80-Mg Railroad Engine A Coasting at 6.5 KM - H Strikes A 20Document4 paginiAn 80-Mg Railroad Engine A Coasting at 6.5 KM - H Strikes A 20Aura Milena Martinez ChavarroÎncă nu există evaluări
- Quantity Surveying Division Assessment of Professional Competence Final Assessment 2014 Practice Problems / Part Ii Written TestDocument31 paginiQuantity Surveying Division Assessment of Professional Competence Final Assessment 2014 Practice Problems / Part Ii Written TestjackyÎncă nu există evaluări
- Panel 01-Eldora-Grand-1500V-2021-R01 - G1Document2 paginiPanel 01-Eldora-Grand-1500V-2021-R01 - G1DHAVAL SHAHÎncă nu există evaluări
- Softening Point of AsphaltDocument2 paginiSoftening Point of AsphaltMuhammad Rizal RamliÎncă nu există evaluări
- Slope Stability in Slightly Fissured Claystones and MarlsDocument25 paginiSlope Stability in Slightly Fissured Claystones and MarlsrullyirwandiÎncă nu există evaluări
- SMP Gateway SoftPLC Reference ManualDocument47 paginiSMP Gateway SoftPLC Reference Manualswalker948100% (1)
- Eje Delantero BMW F10Document94 paginiEje Delantero BMW F10Daniel Muñoz SotomayorÎncă nu există evaluări
- 25252525Document38 pagini25252525Ivan GonzalezÎncă nu există evaluări
- Vibration - Electrical or Mechanical - EASADocument3 paginiVibration - Electrical or Mechanical - EASAGilbÎncă nu există evaluări
- BPSK SimulinkDocument13 paginiBPSK SimulinkpootommyÎncă nu există evaluări
- Electronic Dice Using LEDs Electrical Engineering ProjectDocument16 paginiElectronic Dice Using LEDs Electrical Engineering Projectprakhar agarwal33% (3)
- Stock # Carbon Weight Burn Temp Puncture StrengthDocument8 paginiStock # Carbon Weight Burn Temp Puncture StrengthMintÎncă nu există evaluări
- Glass Inspection CriteriaDocument4 paginiGlass Inspection CriteriabatteekhÎncă nu există evaluări