S-ar putea să vă placă și
- Investigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsDe la EverandInvestigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsÎncă nu există evaluări
- Susol VCB E 1405Document220 paginiSusol VCB E 1405tawanda1984Încă nu există evaluări
- A Fast Method For Calculation of Transformers Leakage Reactance Using Energy TechniqueDocument8 paginiA Fast Method For Calculation of Transformers Leakage Reactance Using Energy TechniqueGame MiÎncă nu există evaluări
- Knowledge is "Real Power": Introduction to Power QualityDe la EverandKnowledge is "Real Power": Introduction to Power QualityÎncă nu există evaluări
- P34x EN AD G54Document48 paginiP34x EN AD G54Adip Chy100% (1)
- Practical Switched Distance RelayDocument37 paginiPractical Switched Distance RelayShahzad BhattiÎncă nu există evaluări
- Numerical RelayingDocument49 paginiNumerical RelayingBhargav PandyaÎncă nu există evaluări
- Trafo Spec PDFDocument56 paginiTrafo Spec PDFMohammad Fadhil KoesputraÎncă nu există evaluări
- Solution Handbook: Harmonic MitigationDocument40 paginiSolution Handbook: Harmonic MitigationAngela TienÎncă nu există evaluări
- Characteristics of Inrush Current of Present Designs of Power Transformers PDFDocument6 paginiCharacteristics of Inrush Current of Present Designs of Power Transformers PDFbpchimeraÎncă nu există evaluări
- Current Transformer - Electrical Notes & ArticlesDocument35 paginiCurrent Transformer - Electrical Notes & ArticlesBlake100% (1)
- Current TransformerDocument22 paginiCurrent TransformerSaji S Sajivv100% (1)
- Compensation of Earth FaultDocument13 paginiCompensation of Earth FaultA. HassanÎncă nu există evaluări
- Trafo Testing SummDocument16 paginiTrafo Testing SummSubhransu MohapatraÎncă nu există evaluări
- Use of RX Diagram in Relaying-GEDocument26 paginiUse of RX Diagram in Relaying-GES Naved Masood100% (2)
- Simulation On Simulink AC4 Model (200hp DTC Induction Motor Drive) Using Fuzzy Logic ControllerDocument5 paginiSimulation On Simulink AC4 Model (200hp DTC Induction Motor Drive) Using Fuzzy Logic ControllerBook4AllÎncă nu există evaluări
- Epac 3000 Rev2 Hardware Manual Rev 1.0Document33 paginiEpac 3000 Rev2 Hardware Manual Rev 1.0Anonymous ouFzvkzÎncă nu există evaluări
- Joe Mooney Presentation For MC C37-114 PSRC May 2016 1 12 16Document19 paginiJoe Mooney Presentation For MC C37-114 PSRC May 2016 1 12 16apofview100% (1)
- Unit 4 - Static Relays and Numerical Protection 4.1 Static RelaysDocument18 paginiUnit 4 - Static Relays and Numerical Protection 4.1 Static RelaysRushikesh KulkarniÎncă nu există evaluări
- Alstom MCGG Relay ManualDocument3 paginiAlstom MCGG Relay ManualJohn rudmanÎncă nu există evaluări
- ZigZag WindingTransformersDocument13 paginiZigZag WindingTransformersromoÎncă nu există evaluări
- Power Systems Protection Course: Al-Balqa Applied UniversityDocument37 paginiPower Systems Protection Course: Al-Balqa Applied Universityrodruren01Încă nu există evaluări
- Testing Numerical Transformer Diff RelaysDocument11 paginiTesting Numerical Transformer Diff Relayshizbi70% (1)
- Graphical Symbols For Electrical Circuit Diagrams 20003 HQ enDocument4 paginiGraphical Symbols For Electrical Circuit Diagrams 20003 HQ enbrianwg2Încă nu există evaluări
- 7SJ80xx Manual A5 V041001 UsDocument550 pagini7SJ80xx Manual A5 V041001 UsAlexandre Moreno100% (1)
- Xmer TestingDocument91 paginiXmer TestingSush SonkÎncă nu există evaluări
- Electromagnetic Relays - ManiDocument17 paginiElectromagnetic Relays - ManipraveenaprabhuÎncă nu există evaluări
- What Is The Difference Between MCB, MCCB, ELCB, and RCCBDocument7 paginiWhat Is The Difference Between MCB, MCCB, ELCB, and RCCBYousif_AbdalhalimÎncă nu există evaluări
- HiZ Auxiliary Units Catalogue SheetDocument12 paginiHiZ Auxiliary Units Catalogue SheetSteven RodriquezÎncă nu există evaluări
- Siemens 7SD8x V7.80 Line PTT User Manual ENUDocument12 paginiSiemens 7SD8x V7.80 Line PTT User Manual ENURaúlEmirGutiérrezLópezÎncă nu există evaluări
- Generator ReactancesDocument3 paginiGenerator ReactancesLora BishopÎncă nu există evaluări
- Ladder DiagramDocument17 paginiLadder DiagramItsMeRyanCÎncă nu există evaluări
- Lec 6: Gain, Phase Margin, Designing With Bode Plots, CompensatorsDocument10 paginiLec 6: Gain, Phase Margin, Designing With Bode Plots, CompensatorszakiannuarÎncă nu există evaluări
- HarmonicsDocument28 paginiHarmonics011253100% (2)
- Adaptive Relaying For Power System Protection: Department of Electrical and Electronics EngineeringDocument12 paginiAdaptive Relaying For Power System Protection: Department of Electrical and Electronics EngineeringJayanth BhargavÎncă nu există evaluări
- Testing and Commissioning JYDocument39 paginiTesting and Commissioning JYRajesh BoddunaÎncă nu există evaluări
- Buchholz Relay in Transformer - Buchholz Relay Operation and PrincipleDocument6 paginiBuchholz Relay in Transformer - Buchholz Relay Operation and PrincipleNeelakandan MasilamaniÎncă nu există evaluări
- Overcurrent ProtectionDocument61 paginiOvercurrent ProtectionHuzaifa WasimÎncă nu există evaluări
- R5582E RELAY Selection GuideDocument14 paginiR5582E RELAY Selection GuideChandra Hamidi KautsarÎncă nu există evaluări
- Ect 160Document20 paginiEct 160Emailsuman ExbiiÎncă nu există evaluări
- Transmission Line VSWRDocument31 paginiTransmission Line VSWRManoj Bhaskar100% (1)
- Overall Understanding of Voltage Transformer 1683194716Document4 paginiOverall Understanding of Voltage Transformer 1683194716rupali patilÎncă nu există evaluări
- Rja-Phasor Diagrams IiDocument20 paginiRja-Phasor Diagrams IiZaks MoreÎncă nu există evaluări
- Transformer Health Index Assessment Rev DDocument17 paginiTransformer Health Index Assessment Rev DTemitope OmoniyiÎncă nu există evaluări
- Use of Synchrophasor Measurements in Protective Relaying ApplicationsDocument72 paginiUse of Synchrophasor Measurements in Protective Relaying ApplicationsAnonymous NGXdt2BxÎncă nu există evaluări
- JVS Manual JRP 011Document12 paginiJVS Manual JRP 011Tamilventhan_sÎncă nu există evaluări
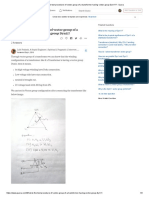
- What Is The Test Procedure of Vector Group of A Transformer Having Vector Group Dyn11 - QuoraDocument3 paginiWhat Is The Test Procedure of Vector Group of A Transformer Having Vector Group Dyn11 - QuoraNeelakandan MasilamaniÎncă nu există evaluări
- Metrosil Relays Datasheet PDFDocument4 paginiMetrosil Relays Datasheet PDFBaskaran Gangatharan100% (1)
- Percentage Differential ProtectionDocument3 paginiPercentage Differential ProtectionThirumalÎncă nu există evaluări
- Power Transformer Attenuates Harmonics PDFDocument7 paginiPower Transformer Attenuates Harmonics PDFgtgreatÎncă nu există evaluări
- Unsymmetrical FaultsDocument16 paginiUnsymmetrical FaultsBhairab BoseÎncă nu există evaluări
- 1KHW000890-En Operating Instructions NSD570 (Dec 2009, Updated May 2010)Document552 pagini1KHW000890-En Operating Instructions NSD570 (Dec 2009, Updated May 2010)lazaruz100% (3)
- To Study The Operation of A Instantaneous Over Current (IDMT Relay)Document8 paginiTo Study The Operation of A Instantaneous Over Current (IDMT Relay)Abhishek HotaÎncă nu există evaluări
- Mho Relay 2 PDFDocument8 paginiMho Relay 2 PDFArion BaboolalÎncă nu există evaluări
- FRAanalyzer Article FRA Condition Assessment Power Transformers OMICRON Magazine 2009 ENUDocument5 paginiFRAanalyzer Article FRA Condition Assessment Power Transformers OMICRON Magazine 2009 ENUGianc87Încă nu există evaluări
- Circuit Breaker RatingDocument4 paginiCircuit Breaker RatingAvishek SapkotaÎncă nu există evaluări
- Chapter 12Document23 paginiChapter 12sachin235Încă nu există evaluări
- Iso-648 Laboratory Glassware - Single-Volume PipettesDocument18 paginiIso-648 Laboratory Glassware - Single-Volume PipettesDawn HaneyÎncă nu există evaluări
- Chapter-6 Hydro-Turbine Governing SystemDocument27 paginiChapter-6 Hydro-Turbine Governing SystemChristian Llanes-de la CruzÎncă nu există evaluări
- Observations On QPDocument18 paginiObservations On QPAnonymous zzMfpoBxÎncă nu există evaluări
- Iso-648 Laboratory Glassware - Single-Volume PipettesDocument18 paginiIso-648 Laboratory Glassware - Single-Volume PipettesDawn HaneyÎncă nu există evaluări
- Vat-Tin RegistrationDocument2 paginiVat-Tin RegistrationAnonymous zzMfpoBxÎncă nu există evaluări
- Chapter 12Document23 paginiChapter 12sachin235Încă nu există evaluări
- High Voltage Circuit Breaker PDFDocument4 paginiHigh Voltage Circuit Breaker PDFA.K.A. HajiÎncă nu există evaluări
- URTDSM Presentation For SR OCC - Aug16Document88 paginiURTDSM Presentation For SR OCC - Aug16Anonymous zzMfpoBxÎncă nu există evaluări
- Generator 100% Stator Earth Fault Protection Using Subharmonic TechniqueDocument14 paginiGenerator 100% Stator Earth Fault Protection Using Subharmonic Techniquemanish1pareek1441Încă nu există evaluări
- 04110995Document8 pagini04110995Anonymous zzMfpoBxÎncă nu există evaluări
- Cost Break UpDocument6 paginiCost Break UpAnonymous zzMfpoBxÎncă nu există evaluări
- Rent Receipt RohilaDocument1 paginăRent Receipt RohilaAnonymous zzMfpoBxÎncă nu există evaluări
- Unified Real Time Data State MeasurementDocument5 paginiUnified Real Time Data State MeasurementAnonymous zzMfpoBxÎncă nu există evaluări
- FGMO - PDF FGMO - PDF FGMO - PDF FGMO PDFDocument5 paginiFGMO - PDF FGMO - PDF FGMO - PDF FGMO PDFabhi24shekÎncă nu există evaluări
- Seimens RIng Flux TestDocument19 paginiSeimens RIng Flux TestAnonymous zzMfpoBx0% (1)
- Module 2: Signals in Frequency Domain Lecture 19: Periodic Convolution and Auto-CorrelationDocument4 paginiModule 2: Signals in Frequency Domain Lecture 19: Periodic Convolution and Auto-CorrelationAnonymous zzMfpoBxÎncă nu există evaluări
- Lec 13Document2 paginiLec 13Anonymous zzMfpoBxÎncă nu există evaluări
- Freq RegDocument5 paginiFreq RegAnonymous zzMfpoBxÎncă nu există evaluări
- GamoDocument1 paginăGamoAnonymous zzMfpoBxÎncă nu există evaluări
- Ybus Formation by MadhuDocument19 paginiYbus Formation by MadhuMadhu Tallapanenimadhu0% (1)
- Experience and Benefit of Using El-Cid For Turbine-GeneratorsDocument16 paginiExperience and Benefit of Using El-Cid For Turbine-GeneratorsSayan AichÎncă nu există evaluări
- Jai Namo NamoDocument1 paginăJai Namo NamoAnonymous zzMfpoBxÎncă nu există evaluări
- Transformers StandardsDocument3 paginiTransformers StandardsAnonymous zzMfpoBxÎncă nu există evaluări
- BammerDocument1 paginăBammerAnonymous zzMfpoBxÎncă nu există evaluări
- International Atomic Energy AssociationDocument1 paginăInternational Atomic Energy AssociationAnonymous zzMfpoBxÎncă nu există evaluări
- Power 07Document6 paginiPower 07Anonymous zzMfpoBxÎncă nu există evaluări
- Transformer BushingDocument11 paginiTransformer BushingNunna BaskarÎncă nu există evaluări
- Inhibited Vs UninhibitedDocument15 paginiInhibited Vs UninhibitedAnonymous zzMfpoBx100% (1)
- Flexsim 5.0 ManualDocument684 paginiFlexsim 5.0 ManualMaryC Marchosky100% (2)
- Inclined PlanesDocument5 paginiInclined PlanesGrace BruanÎncă nu există evaluări
- LightCastle Partners Bangladesh Startup Ecosystem Report 2021 1Document33 paginiLightCastle Partners Bangladesh Startup Ecosystem Report 2021 1Dibakar DasÎncă nu există evaluări
- Alibaba Retail TechnologyDocument28 paginiAlibaba Retail TechnologyHomer SimpÎncă nu există evaluări
- Siebel Chapter 0 BetterDocument18 paginiSiebel Chapter 0 BettermyknhnÎncă nu există evaluări
- Valve Geho Pump Assy PDFDocument5 paginiValve Geho Pump Assy PDFDidik PrihantoroÎncă nu există evaluări
- DaVinci Resolve 17 Fusion Visual EffectsDocument379 paginiDaVinci Resolve 17 Fusion Visual Effectsmaan ti100% (1)
- C84IE007EN A PDL Haze 3001Document5 paginiC84IE007EN A PDL Haze 3001Mauricio CruzÎncă nu există evaluări
- Scraper OutputDocument2 paginiScraper OutputElvis DzeboÎncă nu există evaluări
- Borland - Working DrawingsDocument1 paginăBorland - Working Drawingsleona lopezÎncă nu există evaluări
- D73244GC20 SGDocument316 paginiD73244GC20 SGDjebrani AzizÎncă nu există evaluări
- Mmbth10 (SMD 3em Sot-23) Transistor NPN Vhf-UhfDocument4 paginiMmbth10 (SMD 3em Sot-23) Transistor NPN Vhf-UhfJesus Hung RodriguezÎncă nu există evaluări
- Differential Equations - Vol1 - Worksheet 3 Separation of VariablesDocument44 paginiDifferential Equations - Vol1 - Worksheet 3 Separation of VariablesEunice MaeÎncă nu există evaluări
- Questionnaire Outline: 2021 Coffee Maker Concept Test 211563 December 09, 2021Document38 paginiQuestionnaire Outline: 2021 Coffee Maker Concept Test 211563 December 09, 2021Rajan YadavÎncă nu există evaluări
- A Tertiary Study: Experiences of Conducting Systematic Literature Reviews in Software EngineeringDocument4 paginiA Tertiary Study: Experiences of Conducting Systematic Literature Reviews in Software EngineeringsalmaimtiazÎncă nu există evaluări
- Laboratory 3 EER Modelling and Transformation: Step ER-Model Relational ModelDocument12 paginiLaboratory 3 EER Modelling and Transformation: Step ER-Model Relational ModelHamza QasimÎncă nu există evaluări
- MOT - Week 14 - Assignment - Group 7Document10 paginiMOT - Week 14 - Assignment - Group 7vian100% (2)
- Technical D-313 Datasheet ENDocument2 paginiTechnical D-313 Datasheet ENnikola.markovicÎncă nu există evaluări
- Thermaline 4900 PDSDocument4 paginiThermaline 4900 PDSDuongthithuydungÎncă nu există evaluări
- Eiilm University, Sikkim: ContentDocument45 paginiEiilm University, Sikkim: ContentSamidha MathurÎncă nu există evaluări
- Saf 7113 HTDocument80 paginiSaf 7113 HTgheo23Încă nu există evaluări
- Kyplot Research PDFDocument10 paginiKyplot Research PDFTakkas FernandoÎncă nu există evaluări
- Project Based Lab Report On MEASURING TEDocument23 paginiProject Based Lab Report On MEASURING TERaja VenkateshÎncă nu există evaluări
- EM-20 Fact SheetDocument3 paginiEM-20 Fact SheetВладимир КосенкоÎncă nu există evaluări
- Performer Agreement UGCDocument1 paginăPerformer Agreement UGC9s77s655syÎncă nu există evaluări
- QUESTION 2: TCP and Congestion Control (10 POINTS) : Triple Duplicate ACKDocument4 paginiQUESTION 2: TCP and Congestion Control (10 POINTS) : Triple Duplicate ACKRahul TaldaÎncă nu există evaluări
- Peace Corps Spanish I & WorkbookDocument157 paginiPeace Corps Spanish I & WorkbookElie YabroudiÎncă nu există evaluări
- Raw Data Extract: Pay ReportDocument12 paginiRaw Data Extract: Pay ReportAditya AnandÎncă nu există evaluări
- Release Notes: Analyzer Update October 2019Document18 paginiRelease Notes: Analyzer Update October 2019henry457Încă nu există evaluări
- School of Electrical, Electronics and Computer EngineeringDocument12 paginiSchool of Electrical, Electronics and Computer EngineeringKim Andre MacaraegÎncă nu există evaluări