S-ar putea să vă placă și
- Practical Reverse Engineering: x86, x64, ARM, Windows Kernel, Reversing Tools, and ObfuscationDe la EverandPractical Reverse Engineering: x86, x64, ARM, Windows Kernel, Reversing Tools, and ObfuscationÎncă nu există evaluări
- ARM7TDMI ProcessorDocument44 paginiARM7TDMI Processormuralik_64Încă nu există evaluări
- Preliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960De la EverandPreliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960Încă nu există evaluări
- ARM Processor CoreDocument34 paginiARM Processor CorevarshaksÎncă nu există evaluări
- ARM STM32F476 Interrupts PDFDocument38 paginiARM STM32F476 Interrupts PDFLars NymanÎncă nu există evaluări
- CISCO PACKET TRACER LABS: Best practice of configuring or troubleshooting NetworkDe la EverandCISCO PACKET TRACER LABS: Best practice of configuring or troubleshooting NetworkÎncă nu există evaluări
- Hardware: Hardware For I/O - OverviewDocument17 paginiHardware: Hardware For I/O - Overviewosmanatam1Încă nu există evaluări
- PLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.De la EverandPLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.Încă nu există evaluări
- CMC ArmDocument79 paginiCMC ArmMujikeer MohammedÎncă nu există evaluări
- mani es ch2Document34 paginimani es ch2Dinesh PrabhuÎncă nu există evaluări
- ARM ExceptionsDocument10 paginiARM ExceptionsAmina AmenÎncă nu există evaluări
- F28335 INTERRUPTDocument63 paginiF28335 INTERRUPTNishita ParuchuriÎncă nu există evaluări
- ArmDocument43 paginiArmBharavi K SÎncă nu există evaluări
- Interrupts and Traps in Oberon-ARMDocument3 paginiInterrupts and Traps in Oberon-ARMmqt99311zwoho.comÎncă nu există evaluări
- CEG2400 - Microcomputer Systems ARM Exceptions: Lecture 7: InterruptsDocument7 paginiCEG2400 - Microcomputer Systems ARM Exceptions: Lecture 7: Interruptsvn00426941Încă nu există evaluări
- ARM OverviewDocument43 paginiARM OverviewSelva KumarÎncă nu există evaluări
- ARM STM32F407 InterruptsDocument38 paginiARM STM32F407 Interruptsronaldo008100% (2)
- ARM - PPT 8Document74 paginiARM - PPT 8roysalways4u100% (1)
- Arm InstDocument75 paginiArm InstJohnJohnÎncă nu există evaluări
- Arm OverviewDocument43 paginiArm OverviewAngelina HoffmanÎncă nu există evaluări
- Lecture 7Document26 paginiLecture 7ShazidÎncă nu există evaluări
- Arm7 ArchitectureDocument20 paginiArm7 ArchitectureCharitha CherryÎncă nu există evaluări
- The ARM Instruction Set: Advanced RISC MachinesDocument58 paginiThe ARM Instruction Set: Advanced RISC MachinesarthicseÎncă nu există evaluări
- ARM STM32F407 InterruptsDocument39 paginiARM STM32F407 InterruptsmoeinÎncă nu există evaluări
- Interrupt - IO Part1Document20 paginiInterrupt - IO Part1aesyopÎncă nu există evaluări
- Lecture 10 - Exception HandlingDocument25 paginiLecture 10 - Exception HandlingSuhaib AbugderaÎncă nu există evaluări
- ARM 1vDocument31 paginiARM 1vsuntosh_14Încă nu există evaluări
- MPC555Document27 paginiMPC555Mohammad Gulam AhamadÎncă nu există evaluări
- ARM Instruction SetDocument58 paginiARM Instruction SetPoorva RathoreÎncă nu există evaluări
- Interrupt Structure of 8051Document16 paginiInterrupt Structure of 8051Amar SinghÎncă nu există evaluări
- 8259 ADocument16 pagini8259 Aapi-26113146100% (1)
- EMISY Second Test Exemplary Questions Solved-9Document14 paginiEMISY Second Test Exemplary Questions Solved-9YANG LIUÎncă nu există evaluări
- End Sem ExamDocument20 paginiEnd Sem Examdorejis472Încă nu există evaluări
- Interrupt and Exception: - IntroductionDocument19 paginiInterrupt and Exception: - IntroductionTiruveedula KrishnaÎncă nu există evaluări
- Arm9 Embedded Book-GuideDocument67 paginiArm9 Embedded Book-GuideNguyễn Trường ĐứcÎncă nu există evaluări
- 5-stage Pipeline CPU hardware analysis and ARM architecture overviewDocument33 pagini5-stage Pipeline CPU hardware analysis and ARM architecture overviewrosestrikesÎncă nu există evaluări
- Task Switching:: JMP Call JMP Call Iret JMP Call IretDocument19 paginiTask Switching:: JMP Call JMP Call Iret JMP Call IretAshish PatilÎncă nu există evaluări
- EET303 M3 Ktunotes - inDocument33 paginiEET303 M3 Ktunotes - inBlessy JoyÎncă nu există evaluări
- MPS_Ch10 - AVR_Interrupt Programming in Assembly and CDocument83 paginiMPS_Ch10 - AVR_Interrupt Programming in Assembly and CPhương Nghi LiênÎncă nu există evaluări
- ACE201slides 8Document75 paginiACE201slides 8alexistheÎncă nu există evaluări
- EEE 204 - Lecture 7Document30 paginiEEE 204 - Lecture 7furkanarslan1285Încă nu există evaluări
- ARM Exception Slides-RDocument27 paginiARM Exception Slides-RAyushman SharmaÎncă nu există evaluări
- EET 303 M3_compressedDocument32 paginiEET 303 M3_compressedRabi khanÎncă nu există evaluări
- Introduction To Free-RTOS: Deepak D'SouzaDocument34 paginiIntroduction To Free-RTOS: Deepak D'SouzaNguyễn QuânÎncă nu există evaluări
- Motherboard Repair InformationDocument33 paginiMotherboard Repair Informationabhilashvaman5542100% (1)
- Interupt in ArmDocument28 paginiInterupt in ArmShabeeb Ali OruvangaraÎncă nu există evaluări
- Exception Handling: Understanding ARM Processor Exceptions and Interrupt Handling SchemesDocument30 paginiException Handling: Understanding ARM Processor Exceptions and Interrupt Handling SchemeskarthikborkarÎncă nu există evaluări
- Unit 5a - CPU DesignDocument64 paginiUnit 5a - CPU DesignMʌŋı ßʌķŞhı100% (1)
- Arhitecturi de Microcalculatoare: - Von Neuman - CaracteristiciDocument18 paginiArhitecturi de Microcalculatoare: - Von Neuman - CaracteristiciIoan SusneaÎncă nu există evaluări
- Unit-3 Part-A MPMCDocument17 paginiUnit-3 Part-A MPMCsubbaraoÎncă nu există evaluări
- UG - EC303 DSP Part-4 Fixed Point DSP Control Unit - Print PDFDocument37 paginiUG - EC303 DSP Part-4 Fixed Point DSP Control Unit - Print PDFapuurvaÎncă nu există evaluări
- Computer Architecture: 1. Draw A Diagram Single Bus Organization of The Data Path Inside A ProcessorDocument8 paginiComputer Architecture: 1. Draw A Diagram Single Bus Organization of The Data Path Inside A Processormd sayemÎncă nu există evaluări
- ARM ArchitectureDocument6 paginiARM ArchitectureCarlos AraujoÎncă nu există evaluări
- Development of ARM Architecture and its ProcessorsDocument40 paginiDevelopment of ARM Architecture and its ProcessorsDwaraka OrugantiÎncă nu există evaluări
- ESRTPDocument13 paginiESRTPadvaitkaleÎncă nu există evaluări
- Lecture 3Document88 paginiLecture 3Hemanth KumarÎncă nu există evaluări
- Interrupt handling: Understanding interrupts, interrupt systems, and interrupt handling flowDocument30 paginiInterrupt handling: Understanding interrupts, interrupt systems, and interrupt handling flowKalpit SeksariaÎncă nu există evaluări
- Interrupts - Signals Raised by Hardware External To The MP That Needs A Response (Help) From The MPDocument54 paginiInterrupts - Signals Raised by Hardware External To The MP That Needs A Response (Help) From The MPLakshmi SagarÎncă nu există evaluări
- Interrupt PICDocument18 paginiInterrupt PICvivekpaliÎncă nu există evaluări
- Full Page PhotoDocument1 paginăFull Page PhotoSaket JainÎncă nu există evaluări
- GATE 2016 Certificate From PrincipalDocument1 paginăGATE 2016 Certificate From PrincipalPraveen KumarÎncă nu există evaluări
- Bus RouteDocument1 paginăBus RouteSaket JainÎncă nu există evaluări
- Mumbai University ME ManualDocument15 paginiMumbai University ME ManualAditya DarekarÎncă nu există evaluări
- Electronics BE CMOS Module3 Lec19-28Document58 paginiElectronics BE CMOS Module3 Lec19-28Saket JainÎncă nu există evaluări
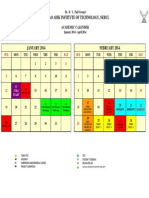
- Ramrao Adik Institute of Technology, Nerul: Academic CalenderDocument2 paginiRamrao Adik Institute of Technology, Nerul: Academic CalenderSaket JainÎncă nu există evaluări
- Final DisseratationDocument15 paginiFinal DisseratationSaket JainÎncă nu există evaluări
- Ramrao Adik Institute of Technology Department of Electronics Engineering Assignment 2 (2015-16 (EVEN) )Document1 paginăRamrao Adik Institute of Technology Department of Electronics Engineering Assignment 2 (2015-16 (EVEN) )Saket JainÎncă nu există evaluări
- Information Brochure M.Tech./M.Tech.+Ph.D. (Dual Degree) Admissions 2013 14Document49 paginiInformation Brochure M.Tech./M.Tech.+Ph.D. (Dual Degree) Admissions 2013 14Saket JainÎncă nu există evaluări
- Benefits of Outsourcing Content Writing to IndiaDocument2 paginiBenefits of Outsourcing Content Writing to IndiaSaket JainÎncă nu există evaluări
- Partial FractionsDocument7 paginiPartial FractionsSaket JainÎncă nu există evaluări
- Cathode Ray OscilloscopeDocument7 paginiCathode Ray OscilloscopeSaket JainÎncă nu există evaluări
- Principles of Communication Systems by Taub & SchillingDocument119 paginiPrinciples of Communication Systems by Taub & SchillingInsane Clown Prince40% (5)
- Super MeshDocument2 paginiSuper MeshSaket JainÎncă nu există evaluări
- Experiment No.09 Aim: To Observe Input and Output Charateristics Ce-Bjt Configuration Using Pspice Software. Software: Pspice Circuit DiagramDocument2 paginiExperiment No.09 Aim: To Observe Input and Output Charateristics Ce-Bjt Configuration Using Pspice Software. Software: Pspice Circuit DiagramSaket JainÎncă nu există evaluări
- ZZENER Diode CharatersticsDocument2 paginiZZENER Diode CharatersticsSaket JainÎncă nu există evaluări
- CS-FET Characteristics Experiment 10: Input/Output PlotsDocument2 paginiCS-FET Characteristics Experiment 10: Input/Output PlotsSaket JainÎncă nu există evaluări
- Cathode Ray OscilloscopeDocument7 paginiCathode Ray OscilloscopeSaket JainÎncă nu există evaluări
- Partial FractionsDocument7 paginiPartial FractionsSaket JainÎncă nu există evaluări
- PN DIODEPN DIODE characters and functionAIM; To observe the characteristic of pn Junction diode.PN DIODE characters and functionAIM; To observe the characteristic of pn Junction diode. SOFTWARE: PSpice CIRCUIT DIAGRAM AIM; To observe the characteristic of pn Junction diode. SOFTWARE: PSpice CIRCUIT DIAGRAM AIM; To observe the characteristic of pn Junction diode. SOFTWARE: PSpice CIRCUIT DIAGRAM AIM; To observe the characteristic of pn Junction diode. SOFTWARE: PSpice CIRCUIT DIAGRAM AIM; To observe the characteristic of pn Junction diode. SOFTWARE: PSpice CIRCUIT DIAGRAMPN DIODE characters and functionAIM; To observe the characteristic of pn Junction diode.Document2 paginiPN DIODEPN DIODE characters and functionAIM; To observe the characteristic of pn Junction diode.PN DIODE characters and functionAIM; To observe the characteristic of pn Junction diode. SOFTWARE: PSpice CIRCUIT DIAGRAM AIM; To observe the characteristic of pn Junction diode. SOFTWARE: PSpice CIRCUIT DIAGRAM AIM; To observe the characteristic of pn Junction diode. SOFTWARE: PSpice CIRCUIT DIAGRAM AIM; To observe the characteristic of pn Junction diode. SOFTWARE: PSpice CIRCUIT DIAGRAM AIM; To observe the characteristic of pn Junction diode. SOFTWARE: PSpice CIRCUIT DIAGRAMPN DIODE characters and functionAIM; To observe the characteristic of pn Junction diode.Saket JainÎncă nu există evaluări
- AcroPDF - Quality PDF Writer & ConverterDocument4 paginiAcroPDF - Quality PDF Writer & ConverterSaket JainÎncă nu există evaluări
- Iv Unit Data Flow, Behavioral Modeling: EC258 Digital System Design Using VHDLDocument17 paginiIv Unit Data Flow, Behavioral Modeling: EC258 Digital System Design Using VHDLventooesteÎncă nu există evaluări
- Green Computing Guide for Reducing Environmental ImpactDocument17 paginiGreen Computing Guide for Reducing Environmental ImpactAkhyar AyubÎncă nu există evaluări
- TLMA User ManualDocument39 paginiTLMA User ManuallettymcÎncă nu există evaluări
- Computer Integrated Manufacturing.Document29 paginiComputer Integrated Manufacturing.cooldude2000Încă nu există evaluări
- Yealink SIP Phones Relese Note of Version72Document37 paginiYealink SIP Phones Relese Note of Version72Luis Toledo LopezÎncă nu există evaluări
- Access and Conversion of Elevation Data For AERMAPDocument4 paginiAccess and Conversion of Elevation Data For AERMAPRocío SandovalÎncă nu există evaluări
- Resources for OSINT toolsDocument2 paginiResources for OSINT toolsAneudy Hernandez PeñaÎncă nu există evaluări
- UNDP Quantum User Guide For Suppliers October Edition PDFDocument111 paginiUNDP Quantum User Guide For Suppliers October Edition PDFShahadath HossenÎncă nu există evaluări
- Internship Assessment Report On: Prakash Gupta 1812210083 Under The Guidance of Er. Devendra KumarDocument26 paginiInternship Assessment Report On: Prakash Gupta 1812210083 Under The Guidance of Er. Devendra KumarAditya SinghÎncă nu există evaluări
- Cloud Computing: Unit-1 - Introduction To Cloud TechnologiesDocument78 paginiCloud Computing: Unit-1 - Introduction To Cloud TechnologiesSarika80% (5)
- SM3260 Product BriefDocument1 paginăSM3260 Product BriefMrr LeeÎncă nu există evaluări
- CV Vaibhav Shete PDFDocument5 paginiCV Vaibhav Shete PDFVaibh RamaÎncă nu există evaluări
- Manual, CTS, D34 595 (Manual English I28)Document127 paginiManual, CTS, D34 595 (Manual English I28)juan100% (1)
- NVIDIA Business ReportDocument15 paginiNVIDIA Business ReportShashwat TiwariÎncă nu există evaluări
- Xerox Workcentre 56Xx 07 To Workcentre 56Xx '08 MFD Comparison White PaperDocument28 paginiXerox Workcentre 56Xx 07 To Workcentre 56Xx '08 MFD Comparison White Papergh hombreÎncă nu există evaluări
- TRB 337Document545 paginiTRB 337Ahalya RajendranÎncă nu există evaluări
- Public Cloud Security 6.0 Study Guide-OnlineDocument178 paginiPublic Cloud Security 6.0 Study Guide-OnlineChalaÎncă nu există evaluări
- Artian Coding AccessDocument4 paginiArtian Coding AccessAthira Putri NaurasariÎncă nu există evaluări
- OKI C310 C330 C530 Maintenance Manual SERVICEDocument221 paginiOKI C310 C330 C530 Maintenance Manual SERVICEYury Kobzar83% (6)
- Arbor APS STT - Unit 13 - SSL Inspection - 25jan2018 PDFDocument40 paginiArbor APS STT - Unit 13 - SSL Inspection - 25jan2018 PDFmasterlinh2008100% (1)
- Moscad-L: SCADA Remote Terminal UnitDocument2 paginiMoscad-L: SCADA Remote Terminal UnitAdrian FigueÎncă nu există evaluări
- Petra UMA Schematics Document Cover PageDocument103 paginiPetra UMA Schematics Document Cover PageFRANCISCO JAVIER JARAMILLO MÎncă nu există evaluări
- RGB ImportDocument5 paginiRGB ImportAamir LokhandwalaÎncă nu există evaluări
- Synopsys FPGA Synthesis Attribute Reference Manual I 2013.09M SP1 1Document190 paginiSynopsys FPGA Synthesis Attribute Reference Manual I 2013.09M SP1 1dgfdfhÎncă nu există evaluări
- Requirements Definition TemplateDocument9 paginiRequirements Definition TemplateecuicasÎncă nu există evaluări
- ACE For IC Business TransactionDocument29 paginiACE For IC Business TransactionnavabhattÎncă nu există evaluări
- BI Apps 11.1.1.8.1 Configuration GuideDocument476 paginiBI Apps 11.1.1.8.1 Configuration Guidemsujankumar100% (1)
- Digital Marketing PackagesDocument6 paginiDigital Marketing Packagesvipin agarwalÎncă nu există evaluări
- Ashish SoftwareDocument2 paginiAshish SoftwareKumar RajputÎncă nu există evaluări
- Security PACE Book 6 - Basic Access Control Concepts: Learning ObjectiveDocument27 paginiSecurity PACE Book 6 - Basic Access Control Concepts: Learning ObjectiveDissasekaraÎncă nu există evaluări