S-ar putea să vă placă și
- The Berenstain Bears and Baby Makes FiveDocument33 paginiThe Berenstain Bears and Baby Makes Fivezhuqiming87% (54)
- Real-Time SchedulingDocument103 paginiReal-Time Schedulingmentor_sarsij100% (2)
- Exercise #1 ReportDocument15 paginiExercise #1 ReportRamnarayan ShreyasÎncă nu există evaluări
- 2018080, CRPC Research PaperDocument23 pagini2018080, CRPC Research Paperguru charanÎncă nu există evaluări
- SchedulingDocument55 paginiSchedulingMohan RajÎncă nu există evaluări
- ESD UNIT III Lecture 03 Task Scheduling Rate MonotonicDocument44 paginiESD UNIT III Lecture 03 Task Scheduling Rate MonotonicNeha MendheÎncă nu există evaluări
- Module 3 - Real Time Task Scheduling - Part1Document53 paginiModule 3 - Real Time Task Scheduling - Part1pranavÎncă nu există evaluări
- Bits RTOS AssignmentDocument4 paginiBits RTOS AssignmentGaurang PrajapatiÎncă nu există evaluări
- 20-Scheduling Schemes - EDF-RMS & Hybrid Techniques,-08!04!2024Document28 pagini20-Scheduling Schemes - EDF-RMS & Hybrid Techniques,-08!04!2024Adit KaushalÎncă nu există evaluări
- Is It Time Yet?: Wing On ChanDocument58 paginiIs It Time Yet?: Wing On ChanShashank SinghÎncă nu există evaluări
- Final RtosDocument52 paginiFinal RtosDaksh BothraÎncă nu există evaluări
- Unit 2 SchedulingDocument5 paginiUnit 2 SchedulingshravanÎncă nu există evaluări
- Priority-Driven Scheduling of Periodic TasksDocument21 paginiPriority-Driven Scheduling of Periodic TasksChichavn ManucianÎncă nu există evaluări
- 18 Rate Monotonic Scheduling 23-02-2024Document17 pagini18 Rate Monotonic Scheduling 23-02-2024cybersyndicatenftÎncă nu există evaluări
- 3445.chapter 3 RTSDocument55 pagini3445.chapter 3 RTSIsha AggarwalÎncă nu există evaluări
- 06 RealtimeDocument48 pagini06 RealtimeBlair ZhangÎncă nu există evaluări
- Unit 5Document19 paginiUnit 5Bindu m.kÎncă nu există evaluări
- Chapte4 ZamznDocument24 paginiChapte4 ZamznAHMED DARAJÎncă nu există evaluări
- RTSDocument34 paginiRTSयोगेशअर्यलÎncă nu există evaluări
- Aperiodic SporadicDocument23 paginiAperiodic Sporadicbhonde_ramÎncă nu există evaluări
- Unit 3 and Unit 4Document105 paginiUnit 3 and Unit 4kalekarmohith02Încă nu există evaluări
- Scheduling AlgorithmDocument27 paginiScheduling AlgorithmSaranya AÎncă nu există evaluări
- Scheduling Algorithms in Real-Time Operating SystemsDocument41 paginiScheduling Algorithms in Real-Time Operating SystemsVinadagu VishayaaluÎncă nu există evaluări
- SchedulingDocument31 paginiSchedulingApar PramodÎncă nu există evaluări
- Real-Time Scheduling: Deadline Based AlgorithmsDocument22 paginiReal-Time Scheduling: Deadline Based AlgorithmsRita ChhikaraÎncă nu există evaluări
- Real Time Embedded - SystemDocument15 paginiReal Time Embedded - SystemAndrei MocanuÎncă nu există evaluări
- Sequencing and SchedulingDocument20 paginiSequencing and SchedulingOsman Hamdi100% (1)
- By Group: Ghassan Abdo Rayyashi Anas To'meh Supervised by Dr. Lo'ai TawalbehDocument29 paginiBy Group: Ghassan Abdo Rayyashi Anas To'meh Supervised by Dr. Lo'ai TawalbehVenu Gopal PÎncă nu există evaluări
- End-To-End Task in Heterogeneous SystemsDocument13 paginiEnd-To-End Task in Heterogeneous SystemsMayank SolankiÎncă nu există evaluări
- Slide 8 DMDocument22 paginiSlide 8 DManupam20099Încă nu există evaluări
- Unit - 4 & 5Document86 paginiUnit - 4 & 5Chaturya DoddiÎncă nu există evaluări
- OS Session 2 SlidesDocument55 paginiOS Session 2 SlidesSHAME BOPEÎncă nu există evaluări
- Multiprocessor Real-Time SchedulingDocument38 paginiMultiprocessor Real-Time SchedulingUm NoorÎncă nu există evaluări
- Seminar On-: Real Time Scheduling Policy For Embedded System DomainDocument25 paginiSeminar On-: Real Time Scheduling Policy For Embedded System Domainvinod kapateÎncă nu există evaluări
- Real Time Scheduling AlgorithmDocument24 paginiReal Time Scheduling AlgorithmamarÎncă nu există evaluări
- RT SchedulingDocument32 paginiRT Schedulingbhumika.verma00Încă nu există evaluări
- Chapter Five: Real-Time Operating Systems RtosDocument37 paginiChapter Five: Real-Time Operating Systems Rtosnatnael demissieÎncă nu există evaluări
- Real Time Task Embedded SystemDocument65 paginiReal Time Task Embedded Systemnahom antenehÎncă nu există evaluări
- Elements of Processor Management: CIS 250 Operating SystemsDocument36 paginiElements of Processor Management: CIS 250 Operating SystemsAsawari SurveÎncă nu există evaluări
- Topics of DiscussionDocument22 paginiTopics of DiscussionAditya MhaisaleÎncă nu există evaluări
- RTS Lecture 4 1644141180167Document21 paginiRTS Lecture 4 1644141180167Gaurav BagdeÎncă nu există evaluări
- Period, The Higher The Priority. Since The Rate - of Job Releases - of A Task Is TheDocument4 paginiPeriod, The Higher The Priority. Since The Rate - of Job Releases - of A Task Is TheEaswar VemulapalliÎncă nu există evaluări
- Chapter 1 RTSDocument12 paginiChapter 1 RTStejaswini9348Încă nu există evaluări
- Module 4 - 3Document62 paginiModule 4 - 3Darshan BabuÎncă nu există evaluări
- Real-Time Scheduling: CIS700 Insup LeeDocument33 paginiReal-Time Scheduling: CIS700 Insup LeeKARUNAMOORTHY BÎncă nu există evaluări
- RTDBDocument47 paginiRTDBnikhat khanÎncă nu există evaluări
- Operating Systems: Lecture 3: Process Scheduling AlgorithmsDocument48 paginiOperating Systems: Lecture 3: Process Scheduling AlgorithmsThiyaga RajanÎncă nu există evaluări
- Chapter 4Document56 paginiChapter 4tanksalebhoomiÎncă nu există evaluări
- 14 - Operations SchedulingDocument11 pagini14 - Operations SchedulingmanjuÎncă nu există evaluări
- Module 4 - 1Document47 paginiModule 4 - 1Darshan BabuÎncă nu există evaluări
- Clock DrivenDocument10 paginiClock Drivenbevan678Încă nu există evaluări
- CS 4 - RTOS-Real Time Systems-August 2021Document58 paginiCS 4 - RTOS-Real Time Systems-August 2021neetika guptaÎncă nu există evaluări
- RTOS1Document23 paginiRTOS12015mdaamir2015Încă nu există evaluări
- Introduction To Real-Time Operating Systems (RTOS) and Scheduling AlgorithmsDocument35 paginiIntroduction To Real-Time Operating Systems (RTOS) and Scheduling AlgorithmsPriyanka RauthanÎncă nu există evaluări
- 3 Process SchedulingDocument48 pagini3 Process SchedulingAmit KumarÎncă nu există evaluări
- Lecture11 - Real Time Opearting SystemDocument12 paginiLecture11 - Real Time Opearting SystemjaltitiÎncă nu există evaluări
- RTSys Lecture Note - ch02 A Reference Model For Real-Time Systems PDFDocument28 paginiRTSys Lecture Note - ch02 A Reference Model For Real-Time Systems PDFloknathÎncă nu există evaluări
- RTSys Lecture Note - Ch04 Clock-Driven SchedulingDocument24 paginiRTSys Lecture Note - Ch04 Clock-Driven Schedulingسام السبئيÎncă nu există evaluări
- Lovely Professional UniversityDocument7 paginiLovely Professional UniversitySandeep MaheshwariÎncă nu există evaluări
- Real Time SchedulingDocument20 paginiReal Time Schedulinghoang88Încă nu există evaluări
- Real Time SchedulingDocument20 paginiReal Time SchedulingSaurabh ShuklaÎncă nu există evaluări
- Kotlin For Android Developers SampleDocument16 paginiKotlin For Android Developers SampleShreyans Pathak100% (1)
- GRE Basic Vocab ListDocument7 paginiGRE Basic Vocab ListShreyans PathakÎncă nu există evaluări
- AC Field NotesDocument2 paginiAC Field NotesShreyans PathakÎncă nu există evaluări
- Big O Algorithm Complexity Cheat SheetDocument3 paginiBig O Algorithm Complexity Cheat SheetShreyans Pathak100% (1)
- Fundamental Rights-Right To Equality, Prohibition of Discrimination, Right To Equality of OpportunityDocument76 paginiFundamental Rights-Right To Equality, Prohibition of Discrimination, Right To Equality of OpportunityutkarshÎncă nu există evaluări
- Essay EnglishDocument4 paginiEssay Englishkiera.kassellÎncă nu există evaluări
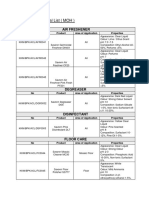
- Approved Chemical ListDocument2 paginiApproved Chemical ListSyed Mansur Alyahya100% (1)
- Marketing Mix of Van HeusenDocument38 paginiMarketing Mix of Van HeusenShail PatelÎncă nu există evaluări
- War Thesis StatementsDocument8 paginiWar Thesis StatementsHelpPaperRochester100% (2)
- Mathsnacks05 InfiniteDocument1 paginăMathsnacks05 Infiniteburkard.polsterÎncă nu există evaluări
- Nursing Care Plan: Pt.'s Data Nursing Diagnosis GoalsDocument1 paginăNursing Care Plan: Pt.'s Data Nursing Diagnosis GoalsKiran Ali100% (3)
- Marketing PlanDocument41 paginiMarketing PlanMark AbainzaÎncă nu există evaluări
- Developing Global LeadersDocument10 paginiDeveloping Global LeadersDeepa SharmaÎncă nu există evaluări
- Basic Translation TerminologyDocument7 paginiBasic Translation TerminologyHeidy BarrientosÎncă nu există evaluări
- Best-First SearchDocument2 paginiBest-First Searchgabby209Încă nu există evaluări
- FMEA 4th BOOK PDFDocument151 paginiFMEA 4th BOOK PDFLuis Cárdenas100% (2)
- Chhabra, D., Healy, R., & Sills, E. (2003) - Staged Authenticity and Heritage Tourism. Annals of Tourism Research, 30 (3), 702-719 PDFDocument18 paginiChhabra, D., Healy, R., & Sills, E. (2003) - Staged Authenticity and Heritage Tourism. Annals of Tourism Research, 30 (3), 702-719 PDF余鸿潇Încă nu există evaluări
- The Minecraft Survival Quest ChallengeDocument4 paginiThe Minecraft Survival Quest Challengeapi-269630780100% (1)
- Chapter One Understanding Civics and Ethics 1.1.defining Civics, Ethics and MoralityDocument7 paginiChapter One Understanding Civics and Ethics 1.1.defining Civics, Ethics and Moralitynat gatÎncă nu există evaluări
- The New Definition and Classification of Seizures and EpilepsyDocument16 paginiThe New Definition and Classification of Seizures and EpilepsynadiafyÎncă nu există evaluări
- Druze ScriptureDocument15 paginiDruze ScriptureChristopher DeMott100% (2)
- 01ESS - Introducing Siebel ApplicationsDocument24 pagini01ESS - Introducing Siebel ApplicationsRajaÎncă nu există evaluări
- RR 10-76Document4 paginiRR 10-76cheska_abigail950Încă nu există evaluări
- Counselling and PsychotherapyDocument12 paginiCounselling and PsychotherapyD.Sreenivasa ReddyÎncă nu există evaluări
- Computer Application in Chemical EngineeringDocument4 paginiComputer Application in Chemical EngineeringRonel MendozaÎncă nu există evaluări
- Applied Nutrition: Nutritional Consideration in The Prevention and Management of Renal Disease - VIIDocument28 paginiApplied Nutrition: Nutritional Consideration in The Prevention and Management of Renal Disease - VIIHira KhanÎncă nu există evaluări
- Acts 1 Bible StudyDocument4 paginiActs 1 Bible StudyPastor Jeanne100% (1)
- Chinese AstronomyDocument13 paginiChinese Astronomyss13Încă nu există evaluări
- Concentrating Partial Entanglement by Local OperationsDocument21 paginiConcentrating Partial Entanglement by Local OperationsbhpliaoÎncă nu există evaluări
- Feline Neonatal IsoerythrolysisDocument18 paginiFeline Neonatal IsoerythrolysisPaunas JoshiÎncă nu există evaluări
- ''Want To Learn To Speak Latin or Greek This (2018) Summer''Document10 pagini''Want To Learn To Speak Latin or Greek This (2018) Summer''ThriwÎncă nu există evaluări
- Kurukku PadaiDocument4 paginiKurukku PadaisimranÎncă nu există evaluări