S-ar putea să vă placă și
- Ejercicios CinematicaDocument4 paginiEjercicios CinematicaYomi CeronÎncă nu există evaluări
- Cantidad de Movimiento Angular de Una PartículaDocument3 paginiCantidad de Movimiento Angular de Una PartículaOscarÎncă nu există evaluări
- Trabajo 01 - Grupo 4Document17 paginiTrabajo 01 - Grupo 4ENZO RODRIGO FELIPE AROTINCOÎncă nu există evaluări
- Cinetica de Cuerpos Rigidos en 3DDocument16 paginiCinetica de Cuerpos Rigidos en 3DMCÎncă nu există evaluări
- Cinemática Rectilínea: Posición, Velocidad y AceleraciónDocument6 paginiCinemática Rectilínea: Posición, Velocidad y AceleraciónXIOMARA YUVIRI DIAZ CALDERONÎncă nu există evaluări
- Problemas de impulso y colisiónDocument13 paginiProblemas de impulso y colisiónMarco Antonio VillegasÎncă nu există evaluări
- PRUEBA N° 3Document2 paginiPRUEBA N° 3Elias Venegas100% (1)
- FRICCION PAVIMENTOS INGENIERIADocument18 paginiFRICCION PAVIMENTOS INGENIERIAAndruRamirezÎncă nu există evaluări
- Fricción y Leyes de La Friccion SecaDocument29 paginiFricción y Leyes de La Friccion SecaRodrigo Ccahuana VargasÎncă nu există evaluări
- Inclinación O Buzamiento: Dirección de CapaDocument6 paginiInclinación O Buzamiento: Dirección de CapaLuis Fidel Castillo EstradaÎncă nu există evaluări
- Contactos geológicos, rumbo y buzamiento, estructuras plegadasDocument1 paginăContactos geológicos, rumbo y buzamiento, estructuras plegadasOmar Paye AriÎncă nu există evaluări
- Movimiento Curvilineo PDFDocument28 paginiMovimiento Curvilineo PDFSharon GoldsteinÎncă nu există evaluări
- Estadis MinDocument12 paginiEstadis MinJuancarlos Jinchuña IllaÎncă nu există evaluări
- Fenomenos SuperficialesDocument11 paginiFenomenos SuperficialescristianÎncă nu există evaluări
- FISICA 1 CLASE CinematicaDocument26 paginiFISICA 1 CLASE CinematicaGonzalo Suarez SanchezÎncă nu există evaluări
- Vectores de Posición, Velociad, AceleraciónDocument7 paginiVectores de Posición, Velociad, AceleraciónfabiolaÎncă nu există evaluări
- Segundo Parcial Geologia EstructuralDocument43 paginiSegundo Parcial Geologia EstructuralMagda MontielÎncă nu există evaluări
- Posicion, Velocidad y Aceleracion AngularDocument5 paginiPosicion, Velocidad y Aceleracion AngularCheeric Moreno20% (5)
- Teorema del momento cinético ecuacionesDocument5 paginiTeorema del momento cinético ecuacionesAnthony Quiroz LeonÎncă nu există evaluări
- Ensayo de Metodos de Prospeccion GeofisicaDocument8 paginiEnsayo de Metodos de Prospeccion GeofisicaLaurithita Sanchez CaroÎncă nu există evaluări
- Medición Con Cinta en Planos InclinadosDocument13 paginiMedición Con Cinta en Planos InclinadosSantiago PadillaÎncă nu există evaluări
- Traslacion, Rotacion y Movimiento Plano GeneralDocument3 paginiTraslacion, Rotacion y Movimiento Plano GeneralCarballo HndzÎncă nu există evaluări
- 2 Movimiento Circular Uniforme PDFDocument10 pagini2 Movimiento Circular Uniforme PDFRosa Isela Callupe ContrerasÎncă nu există evaluări
- Mapa Movimiento Curvilineo de La ParticulaDocument1 paginăMapa Movimiento Curvilineo de La ParticulaWille Ortiz CernaÎncă nu există evaluări
- Práctica #4 Densidad de Una Muestra de Suelo Tallada GeometricamenteDocument14 paginiPráctica #4 Densidad de Una Muestra de Suelo Tallada GeometricamenteJennyfer Serrano100% (1)
- Seminario II CinematicaDocument2 paginiSeminario II CinematicaNilton AbÎncă nu există evaluări
- Unidad 4 TorsionDocument6 paginiUnidad 4 TorsionCarlos Macias AvilaÎncă nu există evaluări
- TiposFallasDocument5 paginiTiposFallasAbby AvendañoÎncă nu există evaluări
- Biesfenoide RombicoDocument3 paginiBiesfenoide RombicoMarcelo Jhon Diaz VelaochagaÎncă nu există evaluări
- Historia de La Evolucion de La TopografiaDocument8 paginiHistoria de La Evolucion de La TopografiaEncanto De Mayo LurenÎncă nu există evaluări
- Dinámica de RotaciónDocument27 paginiDinámica de Rotacióncomar85Încă nu există evaluări
- Cuarta Practica Califivada de Fisica I UcpDocument2 paginiCuarta Practica Califivada de Fisica I UcpClaritaAnguloÎncă nu există evaluări
- Proyecto Calculo VectorialDocument3 paginiProyecto Calculo VectorialDavid BolivarÎncă nu există evaluări
- TrabajoDocument2 paginiTrabajoMaryorieDominguezÎncă nu există evaluări
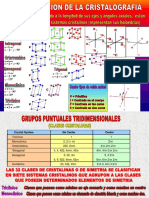
- 1 Clasificacion de La CristalografiaDocument59 pagini1 Clasificacion de La Cristalografiavictor alarcon100% (1)
- Vectores 1d y 2dDocument8 paginiVectores 1d y 2dSAMUEL ADOLFO DUEÑAS APARICIOÎncă nu există evaluări
- Energía Cinética de Un Cuerpo RígidoDocument4 paginiEnergía Cinética de Un Cuerpo RígidovictorÎncă nu există evaluări
- Guia 08 Conservacion de La Energia PDFDocument5 paginiGuia 08 Conservacion de La Energia PDFFabiola Caterin Barria OÎncă nu există evaluări
- 2sem MCR EquilibrioDocument29 pagini2sem MCR EquilibrioBryan Aldahir Gonzales EdonesÎncă nu există evaluări
- ProblemasDocument19 paginiProblemasZairÎncă nu există evaluări
- Física - Movimiento rectilíneo uniforme y aceleradoDocument4 paginiFísica - Movimiento rectilíneo uniforme y aceleradoAlvaro JulcamoroÎncă nu există evaluări
- Tema 13 Cinematica Del PuntoDocument33 paginiTema 13 Cinematica Del PuntoMabel Goicochea BancesÎncă nu există evaluări
- Diapositivas Geologia EstructuralDocument73 paginiDiapositivas Geologia EstructuralpoyorÎncă nu există evaluări
- Calculo Iii 7.2Document10 paginiCalculo Iii 7.2Anthony Gonzales SotoÎncă nu există evaluări
- Informe de Fisica 4Document16 paginiInforme de Fisica 4Edinson Acevedo RiveraÎncă nu există evaluări
- Colisiones InformeDocument9 paginiColisiones InformeJulian UribeÎncă nu există evaluări
- Estatica de ParticulasDocument11 paginiEstatica de ParticulasMateo TrillosÎncă nu există evaluări
- Taller Dinamica PDFDocument4 paginiTaller Dinamica PDFchar16Încă nu există evaluări
- Velocidad RadialDocument7 paginiVelocidad RadialEdgar AlfaroÎncă nu există evaluări
- Ouca PucaDocument5 paginiOuca Pucajesus angel diaz pachecoÎncă nu există evaluări
- Clasificación de Las ArenasDocument7 paginiClasificación de Las ArenasJose JulioÎncă nu există evaluări
- Oscilaciones AmortiguadasDocument10 paginiOscilaciones Amortiguadasjohana diazÎncă nu există evaluări
- Elasticidad - Oscilaciones MecánicasDocument10 paginiElasticidad - Oscilaciones MecánicasMALCA IZQUIERDO LIDIA FLORÎncă nu există evaluări
- Capitulo II Proceso de Subasta o Remate Iniciado Por Un ParticularDocument3 paginiCapitulo II Proceso de Subasta o Remate Iniciado Por Un ParticularErick BalsecaÎncă nu există evaluări
- Sesión 6 - ClaseDocument43 paginiSesión 6 - ClaseGianfranco Riofrio NatteriÎncă nu există evaluări
- Geología - Propiedades Físicas Minerales - La - Luz y Los - Minerales Brillo Transparencia y ColorDocument4 paginiGeología - Propiedades Físicas Minerales - La - Luz y Los - Minerales Brillo Transparencia y ColorJeanette Minerva HuanquilÎncă nu există evaluări
- Diagramas y Polifonías. Experiencias de PensamientoDe la EverandDiagramas y Polifonías. Experiencias de PensamientoÎncă nu există evaluări
- 5.2 Mov Curvilineo...Document4 pagini5.2 Mov Curvilineo...Angie M'nÎncă nu există evaluări
- Aceleración AngularDocument3 paginiAceleración AngularKarencita MartínezÎncă nu există evaluări
- 1.10 Componentes Radial y Transvesal de La VelocidadDocument4 pagini1.10 Componentes Radial y Transvesal de La VelocidadToñoCruzÎncă nu există evaluări
- Interruptores de LimiteDocument3 paginiInterruptores de LimiteRene LopezÎncă nu există evaluări
- Difentes SensoresDocument7 paginiDifentes SensoresRene LopezÎncă nu există evaluări
- Diseño de Ejes Bajo Cargas EstaticasDocument11 paginiDiseño de Ejes Bajo Cargas EstaticasRene Lopez100% (2)
- Ahorro de Energia ElectricaDocument23 paginiAhorro de Energia ElectricaRene Lopez100% (1)
- KAIZENDocument7 paginiKAIZENJulio Torres RiveraÎncă nu există evaluări
- Normas Din, Iso NeumáticaDocument18 paginiNormas Din, Iso NeumáticaRene Lopez50% (2)
- Juntas soldadas bajo carga estáticaDocument3 paginiJuntas soldadas bajo carga estáticaRene Lopez0% (1)
- Just in TimeDocument3 paginiJust in TimeRene LopezÎncă nu există evaluări
- SensoresDocument9 paginiSensoresRene LopezÎncă nu există evaluări
- Liderazgo Relacion Entre PartesDocument15 paginiLiderazgo Relacion Entre PartesRene LopezÎncă nu există evaluări
- Fuentes Renovables de Energia y AplicacionesDocument28 paginiFuentes Renovables de Energia y AplicacionesRene Lopez100% (3)
- Motor UniversalDocument10 paginiMotor UniversalRene LopezÎncă nu există evaluări
- Norma Neumatica e Hidraulica SimbologiaDocument7 paginiNorma Neumatica e Hidraulica SimbologiaRene LopezÎncă nu există evaluări
- Manual de InstalacionDocument2 paginiManual de InstalacionRene LopezÎncă nu există evaluări
- Sistemas Electricos de PotenciaDocument4 paginiSistemas Electricos de PotenciaRene LopezÎncă nu există evaluări
- Sensores Utilizados en La Neumática y HidráulicaDocument14 paginiSensores Utilizados en La Neumática y HidráulicaRene Lopez100% (2)
- Capas de La AtmosferaDocument6 paginiCapas de La AtmosferaRene LopezÎncă nu există evaluări
- Legislación y Normatividad VigenteDocument15 paginiLegislación y Normatividad VigenteRene Lopez100% (1)
- 3.6 Manejo de La InformacionDocument5 pagini3.6 Manejo de La InformacionRene LopezÎncă nu există evaluări
- Planta HidroeléctricaDocument6 paginiPlanta HidroeléctricaRene LopezÎncă nu există evaluări
- 6 SigmaDocument20 pagini6 SigmaRene LopezÎncă nu există evaluări
- Manual de InstalacionDocument2 paginiManual de InstalacionRene LopezÎncă nu există evaluări
- Visita A Coca - ColaDocument3 paginiVisita A Coca - ColaRene LopezÎncă nu există evaluări
- Gurús de La CalidadDocument35 paginiGurús de La CalidadRene LopezÎncă nu există evaluări
- Aplicaciones Ciclo RankineDocument5 paginiAplicaciones Ciclo RankineRene Lopez80% (5)
- Planta HidroeléctricaDocument6 paginiPlanta HidroeléctricaRene LopezÎncă nu există evaluări
- 1.1 Protocologo de Investigación 1.2 Estructura de Protocolo.Document23 pagini1.1 Protocologo de Investigación 1.2 Estructura de Protocolo.Rene LopezÎncă nu există evaluări
- Presas Hidroelectricas en MexicoDocument12 paginiPresas Hidroelectricas en MexicoRene Lopez100% (1)
- HidroelectricasDocument3 paginiHidroelectricasRene LopezÎncă nu există evaluări
- Tarea 2 APA 1Document5 paginiTarea 2 APA 1José Gabriel Montenegro ClassonÎncă nu există evaluări
- Diálogo entre un sacerdote y un moribundoDocument15 paginiDiálogo entre un sacerdote y un moribundoLibrepensador CatódicoÎncă nu există evaluări
- Propiedades de Los FluidosDocument4 paginiPropiedades de Los FluidosCA ACÎncă nu există evaluări
- Muestreo UCSSDocument27 paginiMuestreo UCSScristinaÎncă nu există evaluări
- CALIDADDocument6 paginiCALIDADSergio Hernández GonzálezÎncă nu există evaluări
- Tres Aportes Educacion Popular Latinoamericana Pedagogia ActualDocument11 paginiTres Aportes Educacion Popular Latinoamericana Pedagogia ActualJose Alex Moron100% (1)
- Proceso de ServicioDocument41 paginiProceso de ServicioJudith MataÎncă nu există evaluări
- Textos Realización Uni Carlos Tercero Mad 2016-2017Document26 paginiTextos Realización Uni Carlos Tercero Mad 2016-2017Nacho PiniellaÎncă nu există evaluări
- Cómo Medir La Participación CulturalDocument134 paginiCómo Medir La Participación CulturalJesús ArmoÎncă nu există evaluări
- Examen 2 Programacion LinealDocument4 paginiExamen 2 Programacion LinealSandovalGabrielaÎncă nu există evaluări
- Estrategias para Un Aprendizaje SignificativoDocument39 paginiEstrategias para Un Aprendizaje Significativoragde_serrot100% (5)
- Ficha EcosistemasDocument4 paginiFicha EcosistemasGabriela AlcainÎncă nu există evaluări
- Pauta Evaluación INTEGRATIVA Internado III-IV-V 2023Document13 paginiPauta Evaluación INTEGRATIVA Internado III-IV-V 2023Sergio Omar JaraÎncă nu există evaluări
- Ensayo de Reclutamiento y Selección de Personal Por: Ana Karen Vega SantanaDocument2 paginiEnsayo de Reclutamiento y Selección de Personal Por: Ana Karen Vega Santanaguadalupe87Încă nu există evaluări
- Actividad 6 - ResilienciaDocument2 paginiActividad 6 - ResilienciaCristhian Argollo SapacayoÎncă nu există evaluări
- Luis Carlos Marrero y Daylíns Rufin-Re-Encantos y Re-EncuentrosDocument147 paginiLuis Carlos Marrero y Daylíns Rufin-Re-Encantos y Re-EncuentrosLuis Carlos Marrero ChasbarÎncă nu există evaluări
- More Than HoneyDocument11 paginiMore Than HoneyCarlosÎncă nu există evaluări
- Resumen Ensayos en Forma de HipermediaDocument1 paginăResumen Ensayos en Forma de HipermediaCandela Fernandez NicolauÎncă nu există evaluări
- Psicologia ExperimentalDocument8 paginiPsicologia ExperimentalStephany ChacoaÎncă nu există evaluări
- 2 7 1 - Procedimiento-AlcoholemiaDocument2 pagini2 7 1 - Procedimiento-AlcoholemiaRicardo Alcudia0% (1)
- Lectura de Planos de MontajeDocument9 paginiLectura de Planos de MontajeDamian San Martin SalinasÎncă nu există evaluări
- Músicas populares cuyanas e imaginarios de naciónDocument12 paginiMúsicas populares cuyanas e imaginarios de naciónbraldiss661791Încă nu există evaluări
- Gestion de La Configuracion Del SW (GCS)Document54 paginiGestion de La Configuracion Del SW (GCS)Gabrieliitoo MarlopÎncă nu există evaluări
- Quiz Semana 2Document11 paginiQuiz Semana 2Shirley Seña0% (1)
- La Entrevista Estructurada Y TEMAS de PNLDocument22 paginiLa Entrevista Estructurada Y TEMAS de PNLJavier Perez DÎncă nu există evaluări
- Estatuto UnfvDocument56 paginiEstatuto UnfvJuan F. SánchezÎncă nu există evaluări
- Tutoría: Compartimos Nuestras Emociones en Nuestro Primer Día de ClaseDocument4 paginiTutoría: Compartimos Nuestras Emociones en Nuestro Primer Día de ClaseInversiones Camely SacÎncă nu există evaluări
- Guía de ExelDocument11 paginiGuía de ExelGermán Morales100% (1)
- Administración y programación ERP-CRMDocument42 paginiAdministración y programación ERP-CRMSanti Lopez100% (1)
- Documentación Del SGA.Document2 paginiDocumentación Del SGA.Bernardo Antonio Monsalve LozanoÎncă nu există evaluări