S-ar putea să vă placă și
- Hotspot ScriptDocument23 paginiHotspot ScriptRaouf ValayappuramÎncă nu există evaluări
- DBCDocument3 paginiDBCRaouf ValayappuramÎncă nu există evaluări
- KKDDocument208 paginiKKDRaouf Valayappuram50% (2)
- Introduction To Power ElectronicsDocument41 paginiIntroduction To Power ElectronicsHangya ViktorÎncă nu există evaluări
- Ec 2009Document21 paginiEc 2009kumaranrajÎncă nu există evaluări
- Arch BlockDocument1 paginăArch BlockRaouf ValayappuramÎncă nu există evaluări
- Some SyntaxDocument5 paginiSome SyntaxRaouf ValayappuramÎncă nu există evaluări
- Ec 2004Document21 paginiEc 2004Ci EdutechÎncă nu există evaluări
- DSP Model QuestionsDocument1 paginăDSP Model QuestionsRaouf ValayappuramÎncă nu există evaluări
- Ec502 6Document1 paginăEc502 6Raouf ValayappuramÎncă nu există evaluări
- How Microprocessors WorkDocument9 paginiHow Microprocessors WorkSava IonÎncă nu există evaluări
- RaoufDocument2 paginiRaoufRaouf ValayappuramÎncă nu există evaluări
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (73)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (120)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Overview of Bridge Design and ConstructionDocument81 paginiOverview of Bridge Design and ConstructionrajfabÎncă nu există evaluări
- Concrete Pre-Placement Checklist BackupDocument1 paginăConcrete Pre-Placement Checklist Backuphermano balbonÎncă nu există evaluări
- Maximo JSON API OverviewDocument8 paginiMaximo JSON API OverviewpramodkumarÎncă nu există evaluări
- TCS & P&P PDFDocument27 paginiTCS & P&P PDFsujeetÎncă nu există evaluări
- Sika Decap PDFDocument2 paginiSika Decap PDFthe pilotÎncă nu există evaluări
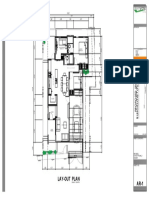
- AR-1 Lay-Out Plan: Master'S Bedroom Home Theater Bedrm. 3Document1 paginăAR-1 Lay-Out Plan: Master'S Bedroom Home Theater Bedrm. 3dante mortelÎncă nu există evaluări
- Euwa40 200MZDocument4 paginiEuwa40 200MZClement WrightÎncă nu există evaluări
- Din 17221Document9 paginiDin 17221hasan_676489616100% (1)
- AWS Backup RecoveryDocument12 paginiAWS Backup RecoveryCarlosÎncă nu există evaluări
- How To Smart Home PDF orDocument79 paginiHow To Smart Home PDF orAndrei Horhoianu100% (1)
- Safety: Important Safety Instructions What Ships in The BoxDocument4 paginiSafety: Important Safety Instructions What Ships in The BoxMarraÎncă nu există evaluări
- Jurnal 1 (Penelitian Murni)Document11 paginiJurnal 1 (Penelitian Murni)Angga Tirta N. PÎncă nu există evaluări
- MPLS Over IP TunnelDocument36 paginiMPLS Over IP TunnelAkhmad Badaruddin SaktiÎncă nu există evaluări
- LOad On Bridge 2Document140 paginiLOad On Bridge 2shamsukarim2009Încă nu există evaluări
- Types of FurnitureDocument19 paginiTypes of FurnitureRuthÎncă nu există evaluări
- Abrasion ResistanceDocument4 paginiAbrasion ResistancerobigedÎncă nu există evaluări
- Himel Productos 10 1Document58 paginiHimel Productos 10 1yasserfouda100% (1)
- 0a-Esp8285 Datasheet en 0Document27 pagini0a-Esp8285 Datasheet en 0dmnnÎncă nu există evaluări
- 1633725Document407 pagini1633725AnoopBinuÎncă nu există evaluări
- Acceptance of Works Inspection ChecklistDocument6 paginiAcceptance of Works Inspection ChecklistJulius Mak'Oderoh100% (1)
- E1 Lab 11 5 5Document19 paginiE1 Lab 11 5 5Chris LeeÎncă nu există evaluări
- Hvca DW 172Document3 paginiHvca DW 172api-26998824100% (1)
- Catalogue Modulo En-20372 PDFDocument32 paginiCatalogue Modulo En-20372 PDFflorinÎncă nu există evaluări
- Undergraduate Academic - Guidelines ESEDocument37 paginiUndergraduate Academic - Guidelines ESEeddieraineÎncă nu există evaluări
- 'A Ghost Story' - Part 3Document3 pagini'A Ghost Story' - Part 3Agnes Magda Dewi S.Pd. (Guru)Încă nu există evaluări
- 3com 4500 MIB Companion (V3.3.2p19)Document132 pagini3com 4500 MIB Companion (V3.3.2p19)diegobsrÎncă nu există evaluări
- 04 MasonryDocument34 pagini04 MasonrySajay PajarillagaÎncă nu există evaluări
- Guide - Set Up Laravel 5.3 With Docker + LaraDock + Let's Encrypt SSL in Digital Ocean Within 5 MinutesDocument10 paginiGuide - Set Up Laravel 5.3 With Docker + LaraDock + Let's Encrypt SSL in Digital Ocean Within 5 MinutesHENRY MITCHELL TAYPE CRUZADOÎncă nu există evaluări
- Oracle FundamentalsDocument2 paginiOracle FundamentalsRakesh ReddyÎncă nu există evaluări
- ASCE Guidelines For Evaluation and Repair of Residential FoundationsDocument20 paginiASCE Guidelines For Evaluation and Repair of Residential Foundationsgeowoz100% (1)