S-ar putea să vă placă și
- Arduino Measurements in Science: Advanced Techniques and Data ProjectsDe la EverandArduino Measurements in Science: Advanced Techniques and Data ProjectsÎncă nu există evaluări
- Numicro Mcu Learning Board: Department of Electrical EngineeringDocument46 paginiNumicro Mcu Learning Board: Department of Electrical EngineeringSzilárd MájerÎncă nu există evaluări
- Tutorial Week 5 AnswersDocument8 paginiTutorial Week 5 Answerspotato moon berryÎncă nu există evaluări
- Lab3 - Blinking LEDsDocument26 paginiLab3 - Blinking LEDsQuang HuyÎncă nu există evaluări
- ARM STM32F107 Development Board ManualDocument66 paginiARM STM32F107 Development Board ManualTiago AveiroÎncă nu există evaluări
- BEE-9D ESD Lab 1Document4 paginiBEE-9D ESD Lab 1Saad NadeemÎncă nu există evaluări
- Aim:-Led Interfacing With Arduino Uno: Experiment:-1Document37 paginiAim:-Led Interfacing With Arduino Uno: Experiment:-1Nikhil MaheswariÎncă nu există evaluări
- C Programming: Department of Electrical EngineeringDocument37 paginiC Programming: Department of Electrical EngineeringSzilárd MájerÎncă nu există evaluări
- Lab1 ReportDocument7 paginiLab1 ReportShayan AmjadÎncă nu există evaluări
- Project 1: Blink An LED With A Time Period of 1000ms: Hardware RequiredDocument13 paginiProject 1: Blink An LED With A Time Period of 1000ms: Hardware RequiredSHINUMMÎncă nu există evaluări
- IOT PracticalDocument10 paginiIOT PracticalParmar ManthanÎncă nu există evaluări
- U20EC086 ES Lab-8Document5 paginiU20EC086 ES Lab-8John wickÎncă nu există evaluări
- Lab 1 Introduction To Stm32F103 and Ide: St-Link V2 and Keil Uvision5Document33 paginiLab 1 Introduction To Stm32F103 and Ide: St-Link V2 and Keil Uvision5Kiều NguyễnÎncă nu există evaluări
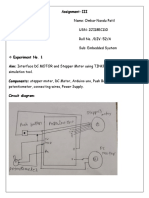
- Name: Omkar Nandu Patil USN: 2JI18EC110 Roll No. /DIV: 52/A Sub: Embedded SystemDocument22 paginiName: Omkar Nandu Patil USN: 2JI18EC110 Roll No. /DIV: 52/A Sub: Embedded SystemOMKAR PATILÎncă nu există evaluări
- FPGA With Touch ScreenDocument23 paginiFPGA With Touch ScreenCharawut MasukÎncă nu există evaluări
- 4 Relays Module ENGDocument17 pagini4 Relays Module ENGwilsnicoÎncă nu există evaluări
- Bai Thuc Hanh KTVXLDocument71 paginiBai Thuc Hanh KTVXLHương LanÎncă nu există evaluări
- ECAD and VLSI Lab ManualDocument107 paginiECAD and VLSI Lab ManualHarold WilsonÎncă nu există evaluări
- MES Lab Manual For Experiment 1 StudentDocument6 paginiMES Lab Manual For Experiment 1 Studentsaira isratÎncă nu există evaluări
- 07 Digital IO Interfacing and ProgrammingDocument5 pagini07 Digital IO Interfacing and Programming2017ee184Încă nu există evaluări
- Ecad and Vlsi Lab ManualDocument125 paginiEcad and Vlsi Lab Manualsameer7mohammadÎncă nu există evaluări
- 05 Laboratory Exercise 5full-PermissionDocument10 pagini05 Laboratory Exercise 5full-PermissionDomsÎncă nu există evaluări
- Configuring GPIO On The STM32F4xx: AppendixDocument8 paginiConfiguring GPIO On The STM32F4xx: AppendixAhmed HamoudaÎncă nu există evaluări
- Experiment No 1: 1. Study of Arm Evaluation SystemDocument30 paginiExperiment No 1: 1. Study of Arm Evaluation SystemAshok KumarÎncă nu există evaluări
- Maes Lab - Exp 01 - Lab Manual - Fall 22-23Document6 paginiMaes Lab - Exp 01 - Lab Manual - Fall 22-23Nouroj AminÎncă nu există evaluări
- Adeept Basic Starter Kit For Arduino UNO R3-V1.0Document93 paginiAdeept Basic Starter Kit For Arduino UNO R3-V1.0Wilfredo MolinaÎncă nu există evaluări
- Robotics Part 1Document24 paginiRobotics Part 1Gour IgÎncă nu există evaluări
- (03 Digital IO Interfacing and ProgrammingDocument7 pagini(03 Digital IO Interfacing and ProgrammingMalix ismÎncă nu există evaluări
- Bapatla Engineering College Dept. of EceDocument9 paginiBapatla Engineering College Dept. of Ecevenkat1115Încă nu există evaluări
- HP Probook 4510s Wistron S-Class Intel Rev Pv-01 SCHDocument62 paginiHP Probook 4510s Wistron S-Class Intel Rev Pv-01 SCHCristian ValentinÎncă nu există evaluări
- IoT Workshop Handout ProgramsDocument7 paginiIoT Workshop Handout ProgramsMayur ShetÎncă nu există evaluări
- Sankalp IOT FileDocument37 paginiSankalp IOT FileMohit kumarÎncă nu există evaluări
- Lunch Box Switch - Seven Segment Display (CC and CA) : Lab Activity - 7Document7 paginiLunch Box Switch - Seven Segment Display (CC and CA) : Lab Activity - 7Vaibhav GoelÎncă nu există evaluări
- Embedded Systems Lab ManualDocument60 paginiEmbedded Systems Lab Manualtmuthu123100% (1)
- Timbangan Digital IoT Dan Data Logger Web Berbasis ESP32, PHP Data Object Dan PostgreSQLDocument48 paginiTimbangan Digital IoT Dan Data Logger Web Berbasis ESP32, PHP Data Object Dan PostgreSQLNurdeny PribadiÎncă nu există evaluări
- Lab Manual 1Document90 paginiLab Manual 1NethajiÎncă nu există evaluări
- 16×2 LCD Module Pin Out DiagramDocument11 pagini16×2 LCD Module Pin Out Diagramvijay bÎncă nu există evaluări
- Lecture Programming MicrocontrollersDocument22 paginiLecture Programming MicrocontrollersHectorLopezÎncă nu există evaluări
- AfibceDocument7 paginiAfibcePaulo Angelo LimÎncă nu există evaluări
- Arduino ExamplesDocument16 paginiArduino ExamplesKapila WijayaratneÎncă nu există evaluări
- Lab 13Document11 paginiLab 13ubaidÎncă nu există evaluări
- Introduction To AVR Programming: Applied Electronics (28846) Fall 2014Document25 paginiIntroduction To AVR Programming: Applied Electronics (28846) Fall 2014Ali DarijaniÎncă nu există evaluări
- CPS Lab Report FinalDocument38 paginiCPS Lab Report Finaldevikam230354ecÎncă nu există evaluări
- Demp Lab ManualDocument50 paginiDemp Lab ManualNishant AcharyaÎncă nu există evaluări
- Lab06 - Smart Home Automation Using SensorsDocument14 paginiLab06 - Smart Home Automation Using SensorsChâu Trần100% (1)
- 8 Relays Module - ENDocument18 pagini8 Relays Module - ENwilsnicoÎncă nu există evaluări
- ECE4721 Lab3 YashGandhamDocument8 paginiECE4721 Lab3 YashGandhamYaswanthrao GandhamÎncă nu există evaluări
- U20EC086 ES Lab-6Document2 paginiU20EC086 ES Lab-6John wickÎncă nu există evaluări
- IoT Practical File BETN1EC18004Document34 paginiIoT Practical File BETN1EC18004Hashtag BloggersÎncă nu există evaluări
- Hammad Khan Lab09Document15 paginiHammad Khan Lab09Inshal GhafoorÎncă nu există evaluări
- ArduinoDocument22 paginiArduinosugadev74Încă nu există evaluări
- TP DSPDocument16 paginiTP DSPikram mbrÎncă nu există evaluări
- Lab 11Document18 paginiLab 11ubaidÎncă nu există evaluări
- 8 Channel 5V 10a Relay ModuleDocument7 pagini8 Channel 5V 10a Relay ModuleArnaudÎncă nu există evaluări
- Epictac Lcd1602 Starter Kit 017-117Document57 paginiEpictac Lcd1602 Starter Kit 017-117grapesÎncă nu există evaluări
- VHDL PortfolioDocument31 paginiVHDL PortfolioRenita ಞ MangoÎncă nu există evaluări
- NodeMCU TutorialDocument49 paginiNodeMCU Tutorialv_ananthuÎncă nu există evaluări
- 12 Led Chaser Using Arduino UnoDocument11 pagini12 Led Chaser Using Arduino UnoRian HandriyantoÎncă nu există evaluări
- Intro To Lab Hex CounterDocument12 paginiIntro To Lab Hex CounterYX GohÎncă nu există evaluări
- NuMicro NUC100 Series Driver Reference GuideDocument411 paginiNuMicro NUC100 Series Driver Reference GuideHanhoaiNguyenÎncă nu există evaluări
- 67 Dohertys Legacy PDFDocument18 pagini67 Dohertys Legacy PDFHanhoaiNguyenÎncă nu există evaluări
- Da00 Nuc140enf1Document77 paginiDa00 Nuc140enf1Kee GerkengÎncă nu există evaluări
- (STP) InterviewDocument4 pagini(STP) InterviewHanhoaiNguyenÎncă nu există evaluări
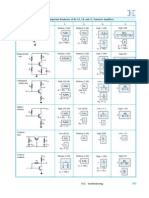
- Cong Thuc TransisToDocument1 paginăCong Thuc TransisToHanhoaiNguyenÎncă nu există evaluări
- Basic Electronics: Department of Electrical EngineeringDocument39 paginiBasic Electronics: Department of Electrical EngineeringHanhoaiNguyenÎncă nu există evaluări
- Giải Chi Tiết Part ĐọcDocument28 paginiGiải Chi Tiết Part ĐọcHanhoaiNguyenÎncă nu există evaluări
- Bài tập liên từ (Conjunctions)Document3 paginiBài tập liên từ (Conjunctions)Hoang AnÎncă nu există evaluări
- Merged - Cong Thuc DTTT1Document6 paginiMerged - Cong Thuc DTTT1HanhoaiNguyenÎncă nu există evaluări
- Bài Tập Ngày 6-7-2015Document8 paginiBài Tập Ngày 6-7-2015HanhoaiNguyenÎncă nu există evaluări
- Cong Thuc DiodeDocument3 paginiCong Thuc DiodeHanhoaiNguyenÎncă nu există evaluări
- Nuc130 140Document1 paginăNuc130 140HanhoaiNguyenÎncă nu există evaluări
- Kho đề thi TOEIC 2Document120 paginiKho đề thi TOEIC 2knight_flycnÎncă nu există evaluări
- 900A - Phan de Test - 1Document10 pagini900A - Phan de Test - 1Quang BùiÎncă nu există evaluări
- 2SA671Document4 pagini2SA671HanhoaiNguyenÎncă nu există evaluări
- TOIEC Grammar - ComparisonDocument6 paginiTOIEC Grammar - Comparisonsilly witchÎncă nu există evaluări
- New Microsoft Word DocumentDocument3 paginiNew Microsoft Word DocumentHanhoaiNguyenÎncă nu există evaluări
- VDC J+: L1 Inductor D3 D4 Diode Bridge C2 104 H1Document1 paginăVDC J+: L1 Inductor D3 D4 Diode Bridge C2 104 H1HanhoaiNguyenÎncă nu există evaluări
- L12 PDFDocument32 paginiL12 PDFArun Dev Dhar DwivediÎncă nu există evaluări
- 900A - Phan de Test - 1Document10 pagini900A - Phan de Test - 1Quang BùiÎncă nu există evaluări
- NuMicro Nano100 (B) Series Product Brief en V1.00Document72 paginiNuMicro Nano100 (B) Series Product Brief en V1.00HanhoaiNguyenÎncă nu există evaluări
- M051Document1 paginăM051HanhoaiNguyenÎncă nu există evaluări
- CPP STL ReferenceManualDocument177 paginiCPP STL ReferenceManualapi-19976667Încă nu există evaluări
- (Codientu - Org) - Kit Arm Cortex-M0Document3 pagini(Codientu - Org) - Kit Arm Cortex-M0duongscribd8xÎncă nu există evaluări
- Sim800 Series Ip Application Note v1.00Document21 paginiSim800 Series Ip Application Note v1.00HanhoaiNguyenÎncă nu există evaluări
- AVR323: Interfacing GSM Modems: FeaturesDocument21 paginiAVR323: Interfacing GSM Modems: FeaturesPriyanka SirohiÎncă nu există evaluări
- Different Types of Sensors and Their WorkingDocument12 paginiDifferent Types of Sensors and Their WorkingTariq ZuhlufÎncă nu există evaluări
- 555 28027 PIR Sensor Prodcut Doc v2.2 PDFDocument5 pagini555 28027 PIR Sensor Prodcut Doc v2.2 PDFchandraÎncă nu există evaluări
- Katalog Bezbednosni Resenija Aleks SistemiDocument4 paginiKatalog Bezbednosni Resenija Aleks SistemiKirilÎncă nu există evaluări
- A Design of Burglar Alarm System Capable of Detecting and Warning On External IntrusionDocument55 paginiA Design of Burglar Alarm System Capable of Detecting and Warning On External IntrusionARDthon Technologies SpantechologiesÎncă nu există evaluări
- Fibaro BrochureDocument2 paginiFibaro Brochurejfa100% (1)
- Sensors and ControllersDocument26 paginiSensors and ControllersSurbhi KaushalÎncă nu există evaluări
- Design Basis Report Electrical Hotel BuiDocument14 paginiDesign Basis Report Electrical Hotel BuiShanaia BualÎncă nu există evaluări
- Data0305 KX18DCDocument3 paginiData0305 KX18DCAbdelhamid SammoudiÎncă nu există evaluări
- Human Detection RobotDocument5 paginiHuman Detection RobotAnuj Raj0% (1)
- PIC Based Security Alarm ProjectDocument11 paginiPIC Based Security Alarm ProjectjoseÎncă nu există evaluări
- Adc Micro ProjectDocument9 paginiAdc Micro ProjectBusiness principlezÎncă nu există evaluări
- Seminar PDFDocument2 paginiSeminar PDFAshu1803Încă nu există evaluări
- Automaticdooropener2022 ReportDocument29 paginiAutomaticdooropener2022 ReportAmeer Fiqri Bin Mohd Fakhrul AnuarÎncă nu există evaluări
- Raspberry Pi IntDocument95 paginiRaspberry Pi IntAniket KhavanekarÎncă nu există evaluări
- Microwave and Infrared Digital Anti-Mask Motion Detector V Description Features Relay Operation DetailsDocument2 paginiMicrowave and Infrared Digital Anti-Mask Motion Detector V Description Features Relay Operation DetailsJulio Cesar Rojas SaavedraÎncă nu există evaluări
- Crabtree Sensor Catalog 2017Document5 paginiCrabtree Sensor Catalog 2017navin jollyÎncă nu există evaluări
- Mlinaric Mario FPZ 2016 Diplo SveucDocument76 paginiMlinaric Mario FPZ 2016 Diplo SveucAdrian Marian RosuÎncă nu există evaluări
- (IJCST-V6I5P12) :Karthikeyan.R.A, Saran Sriram.K, Piyush.DDocument3 pagini(IJCST-V6I5P12) :Karthikeyan.R.A, Saran Sriram.K, Piyush.DEighthSenseGroupÎncă nu există evaluări
- PIR Sensor Based Security System, Circuit Diagram, Working, ApplicationsDocument13 paginiPIR Sensor Based Security System, Circuit Diagram, Working, ApplicationsAlan A. TorresÎncă nu există evaluări
- Design & Implementation of CCTV Using AndroidDocument57 paginiDesign & Implementation of CCTV Using AndroidSegun OlumorinÎncă nu există evaluări
- SeminarDocument12 paginiSeminarNAVEEN KUMAR100% (1)
- 7th Sense Robot 03Document17 pagini7th Sense Robot 03cvagruÎncă nu există evaluări
- Iot-Enabled Smart & Intelligent Lighting Communication System (Silcs)Document48 paginiIot-Enabled Smart & Intelligent Lighting Communication System (Silcs)Zahid JavedÎncă nu există evaluări
- Litreview With RP An PythonDocument26 paginiLitreview With RP An PythonSurajguptarocksÎncă nu există evaluări
- Cet 02 ImDocument9 paginiCet 02 ImHumayun ArshadÎncă nu există evaluări
- DS720i Long Range: AB CD EDocument6 paginiDS720i Long Range: AB CD EJoseph WilczekÎncă nu există evaluări
- Embedded and IOT Internship ReportDocument28 paginiEmbedded and IOT Internship ReportBasavaraj M100% (1)
- S W A N 1 0 0 0: Installation InstructionsDocument2 paginiS W A N 1 0 0 0: Installation InstructionsLuisAlbertoSaldañaRmzÎncă nu există evaluări
- Doppler Radar Motion Sensor RCWL-0516 + Arduino - SURTR TECHNOLOGY InglesDocument9 paginiDoppler Radar Motion Sensor RCWL-0516 + Arduino - SURTR TECHNOLOGY InglesDaru SanÎncă nu există evaluări
- MakerDan's Pit Droid - TutorialDocument13 paginiMakerDan's Pit Droid - TutorialNoted FairÎncă nu există evaluări