S-ar putea să vă placă și
- Cap3 Motor CaDocument20 paginiCap3 Motor CaRoberto Omar López DzibÎncă nu există evaluări
- Prolec GE Productos LATAM PDFDocument20 paginiProlec GE Productos LATAM PDFLuisMarquezÎncă nu există evaluări
- Nom 029 STPS 2011 PDFDocument48 paginiNom 029 STPS 2011 PDFGRANVILLAÎncă nu există evaluări
- Propiedades Del AceroDocument17 paginiPropiedades Del AceroEdison Geovanny TierraÎncă nu există evaluări
- Reactancia CapacitivaDocument1 paginăReactancia Capacitivagarbage94Încă nu există evaluări
- CarcamoDocument3 paginiCarcamogarbage94Încă nu există evaluări
- Dialnet ControlDeSistemasDeLubricacionEnTurbinasDeGasMovil 4168582 PDFDocument10 paginiDialnet ControlDeSistemasDeLubricacionEnTurbinasDeGasMovil 4168582 PDFgarbage94Încă nu există evaluări
- Red Electrica Parques Eolicos PDFDocument40 paginiRed Electrica Parques Eolicos PDFgarbage94Încă nu există evaluări
- Manual Gestion EnergiaDocument92 paginiManual Gestion EnergiacarloscartasineÎncă nu există evaluări
- Diseño de Implementacion de Un Ciclo de Fabricacion de Un PupitreDocument6 paginiDiseño de Implementacion de Un Ciclo de Fabricacion de Un PupitreAnderson GomezÎncă nu există evaluări
- Tabla Especificacion TuberiaDocument2 paginiTabla Especificacion TuberiaMarcoAntonio CarhuamantaIbañezÎncă nu există evaluări
- MDP 02 P 06 Calculo de Servicios de BombeoDocument12 paginiMDP 02 P 06 Calculo de Servicios de BombeoEruaro Guerra CarvajalÎncă nu există evaluări
- Aplicacion de TSCSDocument10 paginiAplicacion de TSCSgarbage94Încă nu există evaluări
- Dibujo 3Document1 paginăDibujo 3garbage94Încă nu există evaluări
- Maquinas de Indusccion Asincronas Ocw - Captitulo - IIDocument38 paginiMaquinas de Indusccion Asincronas Ocw - Captitulo - IIJm MoÎncă nu există evaluări
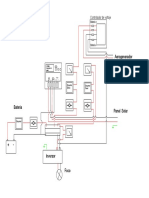
- Aero Con Controlador de CargaDocument1 paginăAero Con Controlador de Cargagarbage94Încă nu există evaluări
- Unidad II 2 Des de Las Sustancias PurasDocument9 paginiUnidad II 2 Des de Las Sustancias PurasGustavo Martinez PerezÎncă nu există evaluări
- PiezoelectricidadDocument9 paginiPiezoelectricidadgarbage94Încă nu există evaluări
- Seleccion de Color Al AulaDocument13 paginiSeleccion de Color Al Aulagarbage94Încă nu există evaluări
- Problemas Resueltos Minimos CuadradosDocument22 paginiProblemas Resueltos Minimos Cuadradoschica2309Încă nu există evaluări
- Instalación Eléctricas en ViviendasDocument32 paginiInstalación Eléctricas en ViviendasFrancisco GarcíaÎncă nu există evaluări
- Estrategia de Las 5sDocument8 paginiEstrategia de Las 5sgarbage94Încă nu există evaluări
- Motor EsDocument47 paginiMotor EsMarcelo RiosÎncă nu există evaluări
- Maquinas de ContinuaDocument51 paginiMaquinas de ContinuaLuc JeanÎncă nu există evaluări
- NI Tutorial 10725 EsDocument3 paginiNI Tutorial 10725 Esgarbage94Încă nu există evaluări
- Unidad I Control de Sistemas de PotenciaDocument39 paginiUnidad I Control de Sistemas de Potenciagarbage94Încă nu există evaluări
- Control A Bili DadDocument16 paginiControl A Bili DaddzarturoÎncă nu există evaluări
- Controlabilidad y ObservabilidadDocument35 paginiControlabilidad y Observabilidaddeaj8710100% (1)
- Fusible para PanelesDocument2 paginiFusible para Panelesgarbage94Încă nu există evaluări
- Generalidades de La CarneDocument9 paginiGeneralidades de La CarneEdgar Humberto Mejia Izquierdo100% (1)
- Capacitación - Accidente OfidicoDocument62 paginiCapacitación - Accidente OfidicoAlejandra GomezÎncă nu există evaluări
- Fase CeroDocument3 paginiFase CeroAnthony OlguinÎncă nu există evaluări
- PRACTICA EDUCATIVA II Programas UNEFA Licenciatura Educación Integral Octavo Semestre 8vo. SemestreDocument5 paginiPRACTICA EDUCATIVA II Programas UNEFA Licenciatura Educación Integral Octavo Semestre 8vo. SemestreJhony PradoÎncă nu există evaluări
- Clasificación de los 17 órdenes de AscomycotaDocument47 paginiClasificación de los 17 órdenes de AscomycotaAndreita LunaÎncă nu există evaluări
- Orar Hoy, Con Los Salmos de Siempre. Tiempo Ordinario.Document287 paginiOrar Hoy, Con Los Salmos de Siempre. Tiempo Ordinario.AngelSainz100% (1)
- Codecs PDFDocument17 paginiCodecs PDFEmil KamadaÎncă nu există evaluări
- Como Instalar Windows 7 Desde CeroDocument11 paginiComo Instalar Windows 7 Desde Cerorobertbe12Încă nu există evaluări
- Cemento Inka G6 PDFDocument14 paginiCemento Inka G6 PDFDavid VilcaÎncă nu există evaluări
- Devocional 5 JobDocument6 paginiDevocional 5 JobElizzabethÎncă nu există evaluări
- Mirla Llanos S2 T2Document2 paginiMirla Llanos S2 T2Mirla Dayana Llanos Mori100% (1)
- Actividades Valores de 4 To A 6 To GradoDocument22 paginiActividades Valores de 4 To A 6 To GradoNesleyda Urdaneta DíazÎncă nu există evaluări
- REGLAMENTO INTERNO - San AgustínDocument71 paginiREGLAMENTO INTERNO - San Agustíngacgmm9602Încă nu există evaluări
- Antologia de Los Documentos Reales de La Dinastia Carlista - Melchor Ferrer (Org.), 1951Document104 paginiAntologia de Los Documentos Reales de La Dinastia Carlista - Melchor Ferrer (Org.), 1951Eduardo CruzÎncă nu există evaluări
- Condiciones y Elementos de Las MuestrasDocument11 paginiCondiciones y Elementos de Las MuestrasMercy Escobar50% (6)
- Labio LeporinoDocument2 paginiLabio LeporinoNILDA LAZARO LAZARTEÎncă nu există evaluări
- Act 16Document5 paginiAct 16Keissy Ivette Sandoval GonzálezÎncă nu există evaluări
- El Hongo Kombucha: Summary. ILLANA, C. (2007) - The Fungi Kombucha. Bol. Soc. Micol. Madrid 31: 269-272Document4 paginiEl Hongo Kombucha: Summary. ILLANA, C. (2007) - The Fungi Kombucha. Bol. Soc. Micol. Madrid 31: 269-272leonel perezÎncă nu există evaluări
- Revista de Sociologia Contemporanea V7 N23 3Document10 paginiRevista de Sociologia Contemporanea V7 N23 3lorena condeÎncă nu există evaluări
- Cap 7 TallerDocument3 paginiCap 7 TallerJenny Pineda100% (1)
- Análisis de La Obra El Lazarillo de TormesDocument38 paginiAnálisis de La Obra El Lazarillo de TormesvimrÎncă nu există evaluări
- QueratometriaDocument2 paginiQueratometriaEstrellita Hinostroza0% (1)
- Diagrama P&IDDocument10 paginiDiagrama P&IDFiLiPh TORWOLFÎncă nu există evaluări
- Rowa ElevadoraDocument1 paginăRowa ElevadoraRomina GalachoÎncă nu există evaluări
- Act. 9 - Quiz 2 - BD BasicoDocument4 paginiAct. 9 - Quiz 2 - BD BasicoNo seÎncă nu există evaluări
- Plantea, Hipot, Probl Obj Antec Marco Tabla Metodologia 6-7Document27 paginiPlantea, Hipot, Probl Obj Antec Marco Tabla Metodologia 6-7Celeste ValverdeÎncă nu există evaluări
- Manual Tecnología para La ApiculturaDocument324 paginiManual Tecnología para La ApiculturamiltonÎncă nu există evaluări
- Notas para Una Simbología de La RosaDocument30 paginiNotas para Una Simbología de La Rosaluchinov100% (1)
- Timeline PDFDocument9 paginiTimeline PDFapi-435931410Încă nu există evaluări
- Especificaciones Tecnicas Ambiente de HospitalDocument61 paginiEspecificaciones Tecnicas Ambiente de HospitalYakumoÎncă nu există evaluări