S-ar putea să vă placă și
- Stepper Motor OperationDocument6 paginiStepper Motor OperationPavan KumarÎncă nu există evaluări
- Short Guide Programming Sinumerik 840DDocument101 paginiShort Guide Programming Sinumerik 840DIlija BozovicÎncă nu există evaluări
- DM 00053454Document4 paginiDM 00053454منير بوزيدÎncă nu există evaluări
- Quelle Est La Différence Entre DCDocument2 paginiQuelle Est La Différence Entre DCمنير بوزيدÎncă nu există evaluări
- Ball Screw CalculatorDocument60 paginiBall Screw Calculatorمنير بوزيدÎncă nu există evaluări
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (73)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (120)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Usurface IIIDocument2 paginiUsurface IIIjanurÎncă nu există evaluări
- Schengen Visa Application 2021-11-26Document5 paginiSchengen Visa Application 2021-11-26Edivaldo NehoneÎncă nu există evaluări
- Function: Maintenance & Repair at Operational LevelDocument2 paginiFunction: Maintenance & Repair at Operational LevelSHUSHEELÎncă nu există evaluări
- Role of Assistive Technology in Teaching-Learning Process of The Students With Visual Impairment: An Insight StudyDocument19 paginiRole of Assistive Technology in Teaching-Learning Process of The Students With Visual Impairment: An Insight StudyAnonymous CwJeBCAXpÎncă nu există evaluări
- Digital Remote TV CodesDocument4 paginiDigital Remote TV CodesPintilie IonÎncă nu există evaluări
- Satellite TTC Module 4Document21 paginiSatellite TTC Module 4AmitÎncă nu există evaluări
- PF Tutorial 1Document3 paginiPF Tutorial 1Parth SolankiÎncă nu există evaluări
- MS Word Basics GuideDocument36 paginiMS Word Basics GuideCarmen NelÎncă nu există evaluări
- Maytag MDG30 MDG50 MDG75 PNH SpecificationsDocument2 paginiMaytag MDG30 MDG50 MDG75 PNH Specificationsmairimsp2003Încă nu există evaluări
- Human Resource Planning in LibrariesDocument15 paginiHuman Resource Planning in LibrariesJohn Pros ValenciaÎncă nu există evaluări
- Erbe Service Manual Icc200 Icc300h-E Icc350Document266 paginiErbe Service Manual Icc200 Icc300h-E Icc350tonybimbo73% (15)
- SWFP66D Series Fine-Grinding Hammer Mill: Operation ManualDocument65 paginiSWFP66D Series Fine-Grinding Hammer Mill: Operation ManualDanielDeFrancescoÎncă nu există evaluări
- Leak Off Test: - Procedure - Maasp - Maximum Allowable Mud WeightDocument5 paginiLeak Off Test: - Procedure - Maasp - Maximum Allowable Mud Weighteng20072007Încă nu există evaluări
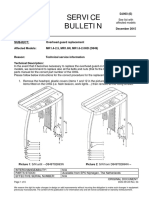
- Service Bulletin: SubjectDocument6 paginiService Bulletin: SubjectWaitylla DiasÎncă nu există evaluări
- Sop SampleDocument2 paginiSop Samplearshpreet bhatiaÎncă nu există evaluări
- MS Disc Brake CaliperDocument2 paginiMS Disc Brake Caliperghgh140Încă nu există evaluări
- Edukasyon Sa Pagpapakatao 6 q1w4Document26 paginiEdukasyon Sa Pagpapakatao 6 q1w4Juliet Del RosarioÎncă nu există evaluări
- Tuguegarao Certificate of Non-Availability of Stocks: Product Code Product Description UOM PriceDocument7 paginiTuguegarao Certificate of Non-Availability of Stocks: Product Code Product Description UOM PriceNenbon NatividadÎncă nu există evaluări
- End-Of-Sale and End-Of-Life Announcement For The Cisco Telepresence Sx20 With 12X CameraDocument3 paginiEnd-Of-Sale and End-Of-Life Announcement For The Cisco Telepresence Sx20 With 12X CameraAmrous MohamedÎncă nu există evaluări
- Electronic Instrumentation and Measurement Full PDFDocument143 paginiElectronic Instrumentation and Measurement Full PDFchildhoodtoons81Încă nu există evaluări
- Module 6: Flow Control Valves: Basic PneumaticsDocument18 paginiModule 6: Flow Control Valves: Basic PneumaticsJohn Fernand RacelisÎncă nu există evaluări
- Update Penjualan 2019 1Document941 paginiUpdate Penjualan 2019 1Viar TimikaÎncă nu există evaluări
- Logistics ManagementDocument2 paginiLogistics ManagementJohn Paul BarotÎncă nu există evaluări
- CSC662 - Computer Security Short NoteDocument10 paginiCSC662 - Computer Security Short NoteMohamad YusriÎncă nu există evaluări
- Hvac and Refrigiration System: Group 1Document52 paginiHvac and Refrigiration System: Group 1Jessa Mae CatabayÎncă nu există evaluări
- T100-V Service ManualDocument22 paginiT100-V Service ManualSergey KutsÎncă nu există evaluări
- Polytec Vibrometer Controller OFV-5000Document121 paginiPolytec Vibrometer Controller OFV-5000vnetawzÎncă nu există evaluări
- Sample Midterm (Lab)Document3 paginiSample Midterm (Lab)Shahab designerÎncă nu există evaluări
- Oilfield Review January 1993Document59 paginiOilfield Review January 1993Andres PalladinoÎncă nu există evaluări
- EENG226 Lab1 PDFDocument5 paginiEENG226 Lab1 PDFSaif HassanÎncă nu există evaluări