S-ar putea să vă placă și
- IoT Based Robot ArmDocument39 paginiIoT Based Robot ArmJayashree R100% (1)
- Wireless Operated Fire Extinguisher Vehicles With Water Jet SprayDocument25 paginiWireless Operated Fire Extinguisher Vehicles With Water Jet SprayRaushanVijaySinghÎncă nu există evaluări
- WarField Land Rover That Alerts On Sensing Panted Land MinesDocument32 paginiWarField Land Rover That Alerts On Sensing Panted Land MinesPavan KPÎncă nu există evaluări
- File 1406270302Document25 paginiFile 1406270302rupeshÎncă nu există evaluări
- Remote Control Operated Spy Robot Circuit - Block DiagramDocument7 paginiRemote Control Operated Spy Robot Circuit - Block Diagramanon_802118071Încă nu există evaluări
- RF Based Dual Mode RobotDocument17 paginiRF Based Dual Mode Robotshuhaibasharaf100% (2)
- Vehicle Speed Control Using RF CommunicationDocument20 paginiVehicle Speed Control Using RF CommunicationRaina John100% (2)
- Circuit Diagram Wireless TransmitterDocument17 paginiCircuit Diagram Wireless Transmitterumaiya1990100% (2)
- ICFYCC Robot for Industrial SafetyDocument8 paginiICFYCC Robot for Industrial SafetyManoj KumarÎncă nu există evaluări
- Metal Detector Robot Controlled RemotelyDocument25 paginiMetal Detector Robot Controlled RemotelyDarshan ParmarÎncă nu există evaluări
- Line Following RobotDocument54 paginiLine Following RobotGautam RaaviÎncă nu există evaluări
- Project Robo 1Document25 paginiProject Robo 1wasifazimÎncă nu există evaluări
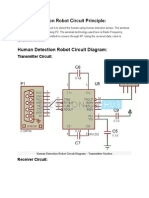
- Human Detection Robot Circuit PrincipleDocument4 paginiHuman Detection Robot Circuit PrincipleAli KhanÎncă nu există evaluări
- Hand Gesture Control Robot PDFDocument3 paginiHand Gesture Control Robot PDFMd IrfanÎncă nu există evaluări
- Android Application Controlled Remote Robot Operation: Under The Guidance ofDocument36 paginiAndroid Application Controlled Remote Robot Operation: Under The Guidance ofAndrew ValentineÎncă nu există evaluări
- Line Follower Robot With IntelligenceDocument11 paginiLine Follower Robot With IntelligenceSabhakant Tripathi0% (1)
- Institute of Engineering and Technology, Alwar, Rajasthan: Wireless Keypad Controlled RobotDocument44 paginiInstitute of Engineering and Technology, Alwar, Rajasthan: Wireless Keypad Controlled RobotTwinkle SinghÎncă nu există evaluări
- LGEC002 Door Lock System Using RFDocument8 paginiLGEC002 Door Lock System Using RFShivani MehrotraÎncă nu există evaluări
- RF Id Attendence MemoryDocument128 paginiRF Id Attendence Memoryakhilesh thapliyalÎncă nu există evaluări
- Human Detection Robot DetailsDocument6 paginiHuman Detection Robot DetailschirayilrichardÎncă nu există evaluări
- PC Controll Wireless Robot Using RF ModuleDocument53 paginiPC Controll Wireless Robot Using RF ModuleanilÎncă nu există evaluări
- Obstacle Avoidance Robot: Submitted byDocument16 paginiObstacle Avoidance Robot: Submitted byNguyen The KhuongÎncă nu există evaluări
- Embedded Based Anti-Collision System in Trains and Controlling of Unmanned Rail GatesDocument22 paginiEmbedded Based Anti-Collision System in Trains and Controlling of Unmanned Rail GatesAdeline WinsterÎncă nu există evaluări
- War Field Spying Robot With Night Vision Wireless Camera by Android ApplicationsDocument32 paginiWar Field Spying Robot With Night Vision Wireless Camera by Android ApplicationsharshithaÎncă nu există evaluări
- Wireless RF and GSM Power Theft DetectionDocument27 paginiWireless RF and GSM Power Theft DetectionDebashishParida50% (2)
- Seminar Report On Missile Detection SystemDocument26 paginiSeminar Report On Missile Detection SystemSaurabh SinghÎncă nu există evaluări
- Cell Phone Operated LandroverDocument31 paginiCell Phone Operated Landrover8bitrebellionÎncă nu există evaluări
- Wireless robot control through RF communicationDocument9 paginiWireless robot control through RF communicationarun1cmÎncă nu există evaluări
- Embedded System for Robot ControlDocument13 paginiEmbedded System for Robot Controllucky jÎncă nu există evaluări
- SPEED CHECKER FOR HI-WAsYSDocument26 paginiSPEED CHECKER FOR HI-WAsYSAbhinav KumaarÎncă nu există evaluări
- Index: Objective Introduction Circuit Description List of Components Circuit Diagram Components DescriptionDocument19 paginiIndex: Objective Introduction Circuit Description List of Components Circuit Diagram Components DescriptionKrishnaBihariShuklaÎncă nu există evaluări
- 5 Channel IR Remote Control System Using MicrocontrollerDocument5 pagini5 Channel IR Remote Control System Using MicrocontrollerKoushik MaityÎncă nu există evaluări
- Advance Surveillance Using 1 Degree Transformer Robot: Department O F Electronics & Communication EngineeringDocument26 paginiAdvance Surveillance Using 1 Degree Transformer Robot: Department O F Electronics & Communication EngineeringAshish ChaurasiaÎncă nu există evaluări
- Pce Mini Project Report: "RF Transmitter and Receiver"Document9 paginiPce Mini Project Report: "RF Transmitter and Receiver"sumit sanchetiÎncă nu există evaluări
- DIY RC Car using Gizduino & RF ModuleDocument17 paginiDIY RC Car using Gizduino & RF ModuleMag0% (1)
- Spying Robot For Army PurposeDocument31 paginiSpying Robot For Army Purposeankit25393Încă nu există evaluări
- Infrared remote control circuits using 32-56 kHz modulationDocument3 paginiInfrared remote control circuits using 32-56 kHz modulationSigid AriewibowoÎncă nu există evaluări
- Applications of 8051 MicrocontrollersDocument23 paginiApplications of 8051 MicrocontrollersUsama Spiffy100% (1)
- Wireless Device Control Project SynopsisDocument92 paginiWireless Device Control Project SynopsisArth PatelÎncă nu există evaluări
- Ic 7805 (Voltage Regulator Ic) : Atmega328Document10 paginiIc 7805 (Voltage Regulator Ic) : Atmega328MohsinRazaÎncă nu există evaluări
- Railway Accident Monitoring System: A Project Report ONDocument13 paginiRailway Accident Monitoring System: A Project Report ONPrateek SrivastavÎncă nu există evaluări
- GSM Controlled CarDocument42 paginiGSM Controlled CarGurhans Pal SinghÎncă nu există evaluări
- File 1389426553Document25 paginiFile 1389426553Er Amarsinh RÎncă nu există evaluări
- k92-IR Remote Control DecoderDocument2 paginik92-IR Remote Control DecoderMoon BhaiÎncă nu există evaluări
- DC Motor Speed ControlDocument23 paginiDC Motor Speed ControlVibhu BansalÎncă nu există evaluări
- PC Based Robot Controlling Using Wireless Communication With ASK ModulationDocument74 paginiPC Based Robot Controlling Using Wireless Communication With ASK ModulationSyam Kumar SÎncă nu există evaluări
- Alcohol Detector Mini 1Document29 paginiAlcohol Detector Mini 1Vishal KukrejaÎncă nu există evaluări
- 1st Rev Road RaggingDocument22 pagini1st Rev Road RaggingElamaruthiÎncă nu există evaluări
- Controlling PC Using TV RemoteDocument12 paginiControlling PC Using TV RemoteIshan JoshiÎncă nu există evaluări
- MAINDocument21 paginiMAINVijaykumar SangisettiÎncă nu există evaluări
- Gokaraju Rangaraju Institute of Engineering and Technology (Autonomous) Project ReportDocument28 paginiGokaraju Rangaraju Institute of Engineering and Technology (Autonomous) Project ReportJeevan KumarÎncă nu există evaluări
- TPS12 Encoder Decfsdlmfoder CODEC Data ManualDocument5 paginiTPS12 Encoder Decfsdlmfoder CODEC Data ManualSikandar MirzaÎncă nu există evaluări
- ST14Document6 paginiST14Adam LopezÎncă nu există evaluări
- Rfid Interface TO 8051: Deepak GuptaDocument4 paginiRfid Interface TO 8051: Deepak Guptamohitdaya14Încă nu există evaluări
- Qa-00447 - Vehicle Accident Prevention Using Eye Blink SensorDocument15 paginiQa-00447 - Vehicle Accident Prevention Using Eye Blink Sensorvasanth sparkÎncă nu există evaluări
- Radio Frequency Identification and Sensors: From RFID to Chipless RFIDDe la EverandRadio Frequency Identification and Sensors: From RFID to Chipless RFIDÎncă nu există evaluări
- Essay Writing Questions and Sample AnswersDocument1 paginăEssay Writing Questions and Sample Answersankita dhengaleÎncă nu există evaluări
- Why Should I Hire You - HR Interview Questions and Answers - 001Document7 paginiWhy Should I Hire You - HR Interview Questions and Answers - 001ankita dhengaleÎncă nu există evaluări
- GeneratorDocument3 paginiGeneratorankita dhengaleÎncă nu există evaluări
- ACE Academy Control SystemsDocument60 paginiACE Academy Control SystemsDevanand T Santha67% (3)
- Basic Concepts in Information Theory ExplainedDocument111 paginiBasic Concepts in Information Theory Explainedchintar2100% (1)
- DSPDocument158 paginiDSPRama KanthÎncă nu există evaluări
- ESE498 Intruder Detection System: Allen Chiang, Jonathan Chu, Siwei SuDocument26 paginiESE498 Intruder Detection System: Allen Chiang, Jonathan Chu, Siwei Suankita dhengaleÎncă nu există evaluări
- DK Children Nature S Deadliest Creatures Visual Encyclopedia PDFDocument210 paginiDK Children Nature S Deadliest Creatures Visual Encyclopedia PDFThu Hà100% (6)
- 07 Raction KineticsDocument43 pagini07 Raction KineticsestefanoveiraÎncă nu există evaluări
- LSUBL6432ADocument4 paginiLSUBL6432ATotoxaHCÎncă nu există evaluări
- PC3 The Sea PeopleDocument100 paginiPC3 The Sea PeoplePJ100% (4)
- Steam Turbines: ASME PTC 6-2004Document6 paginiSteam Turbines: ASME PTC 6-2004Dena Adi KurniaÎncă nu există evaluări
- Helmitin R 14030Document3 paginiHelmitin R 14030katie.snapeÎncă nu există evaluări
- Drugs Pharmacy BooksList2011 UBPStDocument10 paginiDrugs Pharmacy BooksList2011 UBPStdepardieu1973Încă nu există evaluări
- Xii Neet Chemistry Mcqs PDFDocument30 paginiXii Neet Chemistry Mcqs PDFMarcus Rashford100% (3)
- Philippines' Legal Basis for Claims in South China SeaDocument38 paginiPhilippines' Legal Basis for Claims in South China SeaGeeÎncă nu există evaluări
- Metal Framing SystemDocument56 paginiMetal Framing SystemNal MénÎncă nu există evaluări
- 1.2 - Sewing Machine and Special AttachmentsDocument3 pagini1.2 - Sewing Machine and Special Attachmentsmaya_muth0% (1)
- Lee Et Al - 2013Document9 paginiLee Et Al - 2013Taka MuraÎncă nu există evaluări
- Guidance Notes Blow Out PreventerDocument6 paginiGuidance Notes Blow Out PreventerasadqhseÎncă nu există evaluări
- Evolutionary PsychologyDocument10 paginiEvolutionary PsychologyShreya MadheswaranÎncă nu există evaluări
- Madu Rash Tak AmDocument4 paginiMadu Rash Tak AmAdv. Govind S. TehareÎncă nu există evaluări
- EP - EngineDocument4 paginiEP - EngineAkhmad HasimÎncă nu există evaluări
- Flowing Gas Material BalanceDocument4 paginiFlowing Gas Material BalanceVladimir PriescuÎncă nu există evaluări
- Fundermax Exterior Technic 2011gb WebDocument88 paginiFundermax Exterior Technic 2011gb WebarchpavlovicÎncă nu există evaluări
- Entrepreneurship Project On Jam, Jelly & PicklesDocument24 paginiEntrepreneurship Project On Jam, Jelly & Picklesashish karshinkarÎncă nu există evaluări
- Private Schools Provide Better EducationDocument2 paginiPrivate Schools Provide Better EducationcitraÎncă nu există evaluări
- 3D Area Clearance Strategies for Roughing ComponentsDocument6 pagini3D Area Clearance Strategies for Roughing ComponentsMohamedHassanÎncă nu există evaluări
- Tetracyclines: Dr. Md. Rageeb Md. Usman Associate Professor Department of PharmacognosyDocument21 paginiTetracyclines: Dr. Md. Rageeb Md. Usman Associate Professor Department of PharmacognosyAnonymous TCbZigVqÎncă nu există evaluări
- Patent for Fired Heater with Radiant and Convection SectionsDocument11 paginiPatent for Fired Heater with Radiant and Convection Sectionsxyz7890Încă nu există evaluări
- 1"a Study On Employee Retention in Amara Raja Power Systems LTDDocument81 pagini1"a Study On Employee Retention in Amara Raja Power Systems LTDJerome Samuel100% (1)
- IS 4991 (1968) - Criteria For Blast Resistant Design of Structures For Explosions Above Ground-TableDocument1 paginăIS 4991 (1968) - Criteria For Blast Resistant Design of Structures For Explosions Above Ground-TableRenieÎncă nu există evaluări
- TutorialDocument324 paginiTutorialLuisAguilarÎncă nu există evaluări
- B. Pharmacy 2nd Year Subjects Syllabus PDF B Pharm Second Year 3 4 Semester PDF DOWNLOADDocument25 paginiB. Pharmacy 2nd Year Subjects Syllabus PDF B Pharm Second Year 3 4 Semester PDF DOWNLOADarshad alamÎncă nu există evaluări
- ML AiDocument2 paginiML AiSUYASH SHARTHIÎncă nu există evaluări
- Religion in Space Science FictionDocument23 paginiReligion in Space Science FictionjasonbattÎncă nu există evaluări
- Clean Milk ProductionDocument19 paginiClean Milk ProductionMohammad Ashraf Paul100% (3)