S-ar putea să vă placă și
- Arm Instruction 2 - 001Document26 paginiArm Instruction 2 - 001Ankit SanghviÎncă nu există evaluări
- ARM1Document40 paginiARM1Dwaraka OrugantiÎncă nu există evaluări
- ARM Based Development SyllabusDocument3 paginiARM Based Development SyllabusMANIKANDANÎncă nu există evaluări
- Arm Manual Ver3.2 (Modyfideraj)Document83 paginiArm Manual Ver3.2 (Modyfideraj)Srikanth SriÎncă nu există evaluări
- 2 - ARM Cotex-M3 - IntroductionDocument124 pagini2 - ARM Cotex-M3 - IntroductionNghĩa VũÎncă nu există evaluări
- ARM Introduction & Instruction Set ArchitectureDocument71 paginiARM Introduction & Instruction Set ArchitecturebalaÎncă nu există evaluări
- ARM Teaching MaterialDocument33 paginiARM Teaching MaterialViswa PraveenÎncă nu există evaluări
- Armsravan 140618054148 Phpapp01Document132 paginiArmsravan 140618054148 Phpapp01smganorkarÎncă nu există evaluări
- Embedded Lab: Kgisl Institute of Technology Department of Electronics and CommunicationDocument111 paginiEmbedded Lab: Kgisl Institute of Technology Department of Electronics and CommunicationJeeva NatarajanÎncă nu există evaluări
- LPC11U6XDocument97 paginiLPC11U6XDenes MarschalkoÎncă nu există evaluări
- WinAVR User ManualDocument25 paginiWinAVR User ManualVishnu PrasadÎncă nu există evaluări
- ARM Processors Lecture 2015-11-05Document169 paginiARM Processors Lecture 2015-11-05maheshbabu527Încă nu există evaluări
- Course Title: Microprocessor Interfacing TechnologiesDocument22 paginiCourse Title: Microprocessor Interfacing Technologiesaftab_afzal_2Încă nu există evaluări
- Ch01 Microcontroller History and FeaturesDocument20 paginiCh01 Microcontroller History and Featuresmaissy dellaÎncă nu există evaluări
- Embedded Systems With 8051 CDocument190 paginiEmbedded Systems With 8051 CPayal SinghÎncă nu există evaluări
- IAR Workbench SettingsDocument26 paginiIAR Workbench SettingsDavid Moody100% (1)
- Programming Industrial Embedded Systems, 2017./2018.: Laboratory Exercise 1Document69 paginiProgramming Industrial Embedded Systems, 2017./2018.: Laboratory Exercise 1_download_only_Încă nu există evaluări
- The 8051 Microcontroller and Embedded Systems: 8051 Assembly Language ProgrammingDocument297 paginiThe 8051 Microcontroller and Embedded Systems: 8051 Assembly Language ProgrammingShalini BaruahÎncă nu există evaluări
- Hal Manual STMDocument2.232 paginiHal Manual STMDe95BoÎncă nu există evaluări
- Computer Programming 1st Year 3rd UnitDocument55 paginiComputer Programming 1st Year 3rd Unitsingam setty dhanalakshmiÎncă nu există evaluări
- New 8051 MeterialDocument113 paginiNew 8051 Meterialpraneeth saiÎncă nu există evaluări
- Demo Program From Lecture #1: RegistersDocument15 paginiDemo Program From Lecture #1: RegistersNaresh BopparathiÎncă nu există evaluări
- Details of Using SIMULINKDocument54 paginiDetails of Using SIMULINKEngr. Omit DebnathÎncă nu există evaluări
- Keil Uvision 3 TutorialDocument12 paginiKeil Uvision 3 Tutorialapi-3697475100% (1)
- MCBSTM32C Lab PDFDocument30 paginiMCBSTM32C Lab PDFguezaki6636Încă nu există evaluări
- ARM - Module 1Document67 paginiARM - Module 1Somashekar KrishnappaÎncă nu există evaluări
- Arduino To Bread BoardDocument6 paginiArduino To Bread BoardADEÎncă nu există evaluări
- Architecture and Programming of 8051 MicrocontrollersDocument299 paginiArchitecture and Programming of 8051 MicrocontrollersSahil Jain100% (1)
- 3 TcHxW6S6 k3B8VuouvuA Mod2 Devices QC Whiteoutsremoved Mar 2021Document173 pagini3 TcHxW6S6 k3B8VuouvuA Mod2 Devices QC Whiteoutsremoved Mar 2021Umair Ejaz ButtÎncă nu există evaluări
- UM1724 User Manual: STM32 Nucleo-64 Boards (MB1136)Document69 paginiUM1724 User Manual: STM32 Nucleo-64 Boards (MB1136)Basti NichtechtdernameÎncă nu există evaluări
- Stm32F10Xx8 and Stm32F10Xxb Errata SheetDocument26 paginiStm32F10Xx8 and Stm32F10Xxb Errata SheetHagar2007Încă nu există evaluări
- STM32F070CB STM32F070RB STM32F070C6 STM32F070F6Document83 paginiSTM32F070CB STM32F070RB STM32F070C6 STM32F070F6MutiaÎncă nu există evaluări
- C Programming All-In-One Resource For C Programming, Comprehensive Tutorials, Expert TipsDocument236 paginiC Programming All-In-One Resource For C Programming, Comprehensive Tutorials, Expert Tipssklee0730Încă nu există evaluări
- Unit 2-3Document38 paginiUnit 2-3vidhya sÎncă nu există evaluări
- Arduino BreadBoard Advance Kit User Guide v2.1Document23 paginiArduino BreadBoard Advance Kit User Guide v2.1ic3_2kÎncă nu există evaluări
- MCES Group ActivityDocument55 paginiMCES Group ActivitykartiksdanÎncă nu există evaluări
- Digital Electronics Circuit: Assignment - 2Document28 paginiDigital Electronics Circuit: Assignment - 2Rubal SharmaÎncă nu există evaluări
- Programming RobotsDocument239 paginiProgramming RobotsDeep Chaudhari100% (1)
- Serialflash PDFDocument39 paginiSerialflash PDFManoj Kumar MauryaÎncă nu există evaluări
- C-Plus-Plus ToCDocument3 paginiC-Plus-Plus ToCKruthik KruthiÎncă nu există evaluări
- Avr Tutorial - AvrdudeDocument8 paginiAvr Tutorial - AvrdudeBrian JohnsonÎncă nu există evaluări
- Designing of External Loader On QSPIDocument35 paginiDesigning of External Loader On QSPIealanlÎncă nu există evaluări
- ARM Lab MannualDocument136 paginiARM Lab MannualRanjith M KumarÎncă nu există evaluări
- STM32F4 User ManualDocument42 paginiSTM32F4 User ManualAndrei SerghieÎncă nu există evaluări
- User Manual LPC2148Document354 paginiUser Manual LPC2148Paramesh Waran0% (1)
- DAQ, Simulation and Control in MATLAB and SimulinkDocument21 paginiDAQ, Simulation and Control in MATLAB and SimulinkHammerly Mamani ValenciaÎncă nu există evaluări
- Lecture 1 Introduction Review of Classical ControlDocument88 paginiLecture 1 Introduction Review of Classical ControlSiraj MohammedÎncă nu există evaluări
- MNMM54C923-X REV 1A0 Microcircuit Data Sheet: 20-Key EncoderDocument7 paginiMNMM54C923-X REV 1A0 Microcircuit Data Sheet: 20-Key EncoderkelyÎncă nu există evaluări
- Guide To Installation And Use Of Keil Μvision2 SoftwareDocument40 paginiGuide To Installation And Use Of Keil Μvision2 Softwareasma mushtaqÎncă nu există evaluări
- How To Connect The ATmega328P Xplained Mini To The Arduino IDEDocument5 paginiHow To Connect The ATmega328P Xplained Mini To The Arduino IDEphuceltnÎncă nu există evaluări
- Using Matlab Functions in CDocument10 paginiUsing Matlab Functions in CDewi AmoreÎncă nu există evaluări
- Open The Stm32Cubemx and Select The Chip, Make Changes and Go To Project - SettingsDocument6 paginiOpen The Stm32Cubemx and Select The Chip, Make Changes and Go To Project - SettingsRefik ZaimovicÎncă nu există evaluări
- WinAVR User ManualDocument24 paginiWinAVR User Manual1donald1Încă nu există evaluări
- stm32h742 stm32h743 Device Limitations StmicroelectronicsDocument45 paginistm32h742 stm32h743 Device Limitations StmicroelectronicsAndres GonzalezÎncă nu există evaluări
- Unit 2 - ARM7 Based MicrocontrollerDocument106 paginiUnit 2 - ARM7 Based MicrocontrollerKunal Khandelwal100% (1)
- Font PageDocument9 paginiFont PageTarekÎncă nu există evaluări
- Embedded Systems: ARM Programming and OptimizationDe la EverandEmbedded Systems: ARM Programming and OptimizationÎncă nu există evaluări
- Information BrochureDocument45 paginiInformation Brochurevidak vidakedÎncă nu există evaluări
- One Bit at A Time, Slower and Less No of Cables RequiredDocument23 paginiOne Bit at A Time, Slower and Less No of Cables RequiredKiran KumarÎncă nu există evaluări
- Read MeDocument10 paginiRead MeAshesh PradhanÎncă nu există evaluări
- PCBDocument5 paginiPCBKiran KumarÎncă nu există evaluări
- Davis Bunn, Unscripted Revell Books, A Division of Baker Publishing Group, © 2019. Used by PermissionDocument12 paginiDavis Bunn, Unscripted Revell Books, A Division of Baker Publishing Group, © 2019. Used by PermissionKiran KumarÎncă nu există evaluări
- PCBDocument5 paginiPCBKiran KumarÎncă nu există evaluări
- Wireless Internet 1Document23 paginiWireless Internet 1Kiran KumarÎncă nu există evaluări
- Datasheet Atmega32Document346 paginiDatasheet Atmega32Mas NyamÎncă nu există evaluări
- Design of ARM-Based Embedded Ethernet Interface 2010Document3 paginiDesign of ARM-Based Embedded Ethernet Interface 2010Kiran KumarÎncă nu există evaluări
- Cellular MobDocument936 paginiCellular MobchandanaÎncă nu există evaluări
- Intro To ARM Cortex M3Document17 paginiIntro To ARM Cortex M3JakaÎncă nu există evaluări
- New Canellation Charges For Train TicketsDocument2 paginiNew Canellation Charges For Train TicketsKiran KumarÎncă nu există evaluări
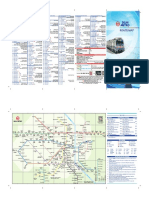
- Delhi Metro Map and Info PDFDocument2 paginiDelhi Metro Map and Info PDFKiran KumarÎncă nu există evaluări
- AbstractDocument1 paginăAbstractKiran KumarÎncă nu există evaluări
- CA Certificate in Internet Explorer & Chrome: 1. Go To Internet Options Content CertificatesDocument8 paginiCA Certificate in Internet Explorer & Chrome: 1. Go To Internet Options Content CertificatesKiran KumarÎncă nu există evaluări
- Introduction To ISPDocument4 paginiIntroduction To ISPKiran KumarÎncă nu există evaluări
- 433 MHZ RF TransmitterDocument4 pagini433 MHZ RF TransmitterKiran KumarÎncă nu există evaluări
- MattMaupin FreescaleSemiconductorDocument32 paginiMattMaupin FreescaleSemiconductorKiran KumarÎncă nu există evaluări
- Stress Management Workshop Hand OutDocument7 paginiStress Management Workshop Hand OutKiran KumarÎncă nu există evaluări
- Identifying Objects Using RF Transmitters and Receivers, and Retrieving DataDocument6 paginiIdentifying Objects Using RF Transmitters and Receivers, and Retrieving DataKiran KumarÎncă nu există evaluări
- Load Balancing in P2P Networks: Using Statistics To Fight Data and Execution SkewDocument10 paginiLoad Balancing in P2P Networks: Using Statistics To Fight Data and Execution SkewKiran KumarÎncă nu există evaluări
- Prayer Meeting GuidelinesDocument7 paginiPrayer Meeting GuidelinesKiran KumarÎncă nu există evaluări
- Se MeterDataProcessingDocument83 paginiSe MeterDataProcessingbzkxtÎncă nu există evaluări
- Architecture Concerns of TST and NATO TST ToolDocument9 paginiArchitecture Concerns of TST and NATO TST Tooldorupara718747Încă nu există evaluări
- EVI DC Inverter Technical Manual 2 Capacity TableDocument67 paginiEVI DC Inverter Technical Manual 2 Capacity TableMouyed Al QasemÎncă nu există evaluări
- Potsdam Village Police Dept. Blotter April 12, 2018Document2 paginiPotsdam Village Police Dept. Blotter April 12, 2018NewzjunkyÎncă nu există evaluări
- Q45U Ultrasonic Sensors With Analog Outputs (Short Range) : DatasheetDocument8 paginiQ45U Ultrasonic Sensors With Analog Outputs (Short Range) : DatasheetMohammad IsmailÎncă nu există evaluări
- A320 Documentation (1 CMP) PDFDocument198 paginiA320 Documentation (1 CMP) PDFRamakrishnan AmbiSubbiah75% (4)
- Chemistry, Intermediate II Year Model Question PapersDocument3 paginiChemistry, Intermediate II Year Model Question PapersAkshay PandeyÎncă nu există evaluări
- A340-Elec Emer ConfigDocument13 paginiA340-Elec Emer ConfigGerhard StorbeckÎncă nu există evaluări
- 04 Rociador Tyco K11.2 SRDocument6 pagini04 Rociador Tyco K11.2 SRRuben Saucedo JacomeÎncă nu există evaluări
- Sandvik: 11/2019 PME F Additional Comments For Hydrabolt Option & HH200Document1 paginăSandvik: 11/2019 PME F Additional Comments For Hydrabolt Option & HH200Elber Luis Chavez BarriosÎncă nu există evaluări
- Mitsubishi Electric Industrial Robots: Communication Middleware (Melfarxm - Ocx) Instruction ManualDocument152 paginiMitsubishi Electric Industrial Robots: Communication Middleware (Melfarxm - Ocx) Instruction ManualRafael GagoÎncă nu există evaluări
- MSM Carbon FibreDocument35 paginiMSM Carbon FibrelokeshkrkushwahaÎncă nu există evaluări
- NEMA Premium CatalogDocument38 paginiNEMA Premium CatalogPedro SanchezÎncă nu există evaluări
- AA Holtz & Kovacs - An Introduction To Geotechnical Engineering PDFDocument746 paginiAA Holtz & Kovacs - An Introduction To Geotechnical Engineering PDFPeterÎncă nu există evaluări
- Uk Fat 2017Document178 paginiUk Fat 2017Christopher J MillsÎncă nu există evaluări
- Astm D3212.380331 1Document3 paginiAstm D3212.380331 1anish_am2005Încă nu există evaluări
- Ultrasonic Atomizing Nozzle SystemsDocument40 paginiUltrasonic Atomizing Nozzle SystemsAnonymous H8hysGxA100% (1)
- MR ValvesDocument56 paginiMR ValvesIdris SiddiquiÎncă nu există evaluări
- Welding Procedure Specification: Material / Joints QualifiedDocument2 paginiWelding Procedure Specification: Material / Joints QualifiedFernando LlontopÎncă nu există evaluări
- M2.2.9 Critical Review and Selection of NDT MethodsDocument13 paginiM2.2.9 Critical Review and Selection of NDT MethodsAldy Bagus PratamaÎncă nu există evaluări
- CH 19Document147 paginiCH 19Kathy YellaÎncă nu există evaluări
- ICE Annex A Methodologies For RecyclingDocument17 paginiICE Annex A Methodologies For RecyclingChai Lin NyokÎncă nu există evaluări
- Apollo Experience Report Electronic Systems Test Program Accomplishments and ResultsDocument70 paginiApollo Experience Report Electronic Systems Test Program Accomplishments and ResultsBob AndrepontÎncă nu există evaluări
- Vol Damper (Smacna)Document9 paginiVol Damper (Smacna)MohamedOmar83Încă nu există evaluări
- WaterproofingDocument29 paginiWaterproofingAakansha DÎncă nu există evaluări
- Chip Scale Atomic Magnetometer Based On SERFDocument4 paginiChip Scale Atomic Magnetometer Based On SERFluckystar83100% (2)
- Elevated Intz Tank 279Document23 paginiElevated Intz Tank 279Navasivayam Sankar100% (2)
- 2 Related Topics Automatic IrrigationDocument13 pagini2 Related Topics Automatic IrrigationSftvsn Giovanni TandogÎncă nu există evaluări
- 507 39 Solutions-Instructor-manual Ch7 DRCSDocument13 pagini507 39 Solutions-Instructor-manual Ch7 DRCSArun GoyalÎncă nu există evaluări
- Machining Processes Used To Produce Round Shapes: Turning and Hole MakingDocument38 paginiMachining Processes Used To Produce Round Shapes: Turning and Hole MakingCh TalhaÎncă nu există evaluări