S-ar putea să vă placă și
- Synchronous Motor AC DrivesDocument40 paginiSynchronous Motor AC DrivesHarshal Thakur100% (1)
- Electrical Machines Induction and Synchronous MachinesDocument42 paginiElectrical Machines Induction and Synchronous MachinesYoshua DylanÎncă nu există evaluări
- Slip Power Recovery-Induction MotorDocument24 paginiSlip Power Recovery-Induction MotorSulthaniya BeeviÎncă nu există evaluări
- Synchronous MachinesclassDocument76 paginiSynchronous Machinesclassbhuvana71Încă nu există evaluări
- Induction MotorDocument114 paginiInduction MotorNesarkiran BagadeÎncă nu există evaluări
- Synchronous Machines3Document103 paginiSynchronous Machines3Daniela CastroÎncă nu există evaluări
- Chapter 5 - Synchronous Generator: The Effect of Load Changes On A Synchronous Generator Operating AloneDocument46 paginiChapter 5 - Synchronous Generator: The Effect of Load Changes On A Synchronous Generator Operating AloneMuhammad R ShihadehÎncă nu există evaluări
- Induction GeneratorDocument12 paginiInduction GeneratorSumaira SaifÎncă nu există evaluări
- Protective Relaying Testing ST6Document6 paginiProtective Relaying Testing ST6Darwin MesaÎncă nu există evaluări
- Synchronous Motor Drives - LCIDocument15 paginiSynchronous Motor Drives - LCIJoyson PereiraÎncă nu există evaluări
- Induction Motors Unit 3Document26 paginiInduction Motors Unit 3babu KaroliÎncă nu există evaluări
- Variable Voltage & Frequency Controlled 3 Phase Induction MotorDocument6 paginiVariable Voltage & Frequency Controlled 3 Phase Induction MotorNAVEED ISHRAQÎncă nu există evaluări
- Lab MachineDocument9 paginiLab MachineAnonymous ryvoPIDÎncă nu există evaluări
- III Eee 05 Ee8501 Psa Unit 1Document37 paginiIII Eee 05 Ee8501 Psa Unit 1BALAKRISHNANÎncă nu există evaluări
- DC Motor Speed ControllerDocument22 paginiDC Motor Speed ControllerShafqt MbrkÎncă nu există evaluări
- BLDC MotorDocument16 paginiBLDC MotorArchana Diwakar RanjishÎncă nu există evaluări
- Switched Reluctance Reluctance Motors and ControlDocument47 paginiSwitched Reluctance Reluctance Motors and ControlSreerag Kunnathu Sugathan100% (1)
- Experiment No.5-Determination of XD and XQ of Synchronous Machine by Slip TestDocument3 paginiExperiment No.5-Determination of XD and XQ of Synchronous Machine by Slip Test61EEPrabhat PalÎncă nu există evaluări
- Speed Control of Vsi Based Induction Motor Using AnnDocument38 paginiSpeed Control of Vsi Based Induction Motor Using AnnPAVAN CHAVALIÎncă nu există evaluări
- Brown Final PPT FinalDocument36 paginiBrown Final PPT FinalDarshan100% (2)
- PROJCTDocument32 paginiPROJCTSwati Agarwal100% (1)
- Synchronous MotorDocument4 paginiSynchronous MotorLiviu DeaconuÎncă nu există evaluări
- Reluctance MotorDocument24 paginiReluctance Motorpraveenpv7100% (1)
- Induction Motor DrivesDocument73 paginiInduction Motor DrivesSai Pranahita KulithalaiÎncă nu există evaluări
- Calculation - Method - ULF Unbalanced Load Flow ETAP PDFDocument8 paginiCalculation - Method - ULF Unbalanced Load Flow ETAP PDFZulqibalÎncă nu există evaluări
- AC DC DrivesDocument13 paginiAC DC Drives322399mk7086Încă nu există evaluări
- Types of Single Phase Induction MotorDocument12 paginiTypes of Single Phase Induction Motorkarthikeyan249Încă nu există evaluări
- Power System Protection Power System Stability: Substation Automation ProductsDocument15 paginiPower System Protection Power System Stability: Substation Automation ProductsRobert Mihayo100% (1)
- Voltage Regulation at Sites With Distributed GenerationDocument10 paginiVoltage Regulation at Sites With Distributed GenerationpetarlÎncă nu există evaluări
- SFC OperationDocument10 paginiSFC OperationKelvin LiewÎncă nu există evaluări
- Inverter and ChopperDocument92 paginiInverter and ChopperGnanaseharan ArunachalamÎncă nu există evaluări
- 1) Negative Sequence Test: Power Transmission Distribution Test Report For Differential Protection Relay 7um62 PTD/7UM62Document9 pagini1) Negative Sequence Test: Power Transmission Distribution Test Report For Differential Protection Relay 7um62 PTD/7UM62subhasish03ee6301Încă nu există evaluări
- 开关磁阻电机的ANSOFT建模方法Document28 pagini开关磁阻电机的ANSOFT建模方法Nuwantha FernandoÎncă nu există evaluări
- Vector GroupDocument8 paginiVector GroupSuraj Kumar GuptaÎncă nu există evaluări
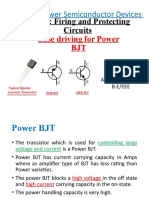
- Base Driving For Power BJT SivaDocument16 paginiBase Driving For Power BJT SivaSachin SivaÎncă nu există evaluări
- Automatic Alternator SynchronisationDocument24 paginiAutomatic Alternator SynchronisationHemant Patel50% (2)
- Ee 1403 Solid State DrivesDocument14 paginiEe 1403 Solid State DrivesPanchi AgrawalÎncă nu există evaluări
- UNIT 5 - Special MachinesDocument33 paginiUNIT 5 - Special MachinesKapilachander ThangavelÎncă nu există evaluări
- Special Electrical Machines Ee2403 PDFDocument16 paginiSpecial Electrical Machines Ee2403 PDFsamyramu100% (3)
- Current Source InvertersDocument24 paginiCurrent Source InverterskmohanadasseÎncă nu există evaluări
- Lesson Plan em 2Document3 paginiLesson Plan em 2anbuelectricalÎncă nu există evaluări
- The Elementary Mathematical Model For Synchronous MachinesDocument40 paginiThe Elementary Mathematical Model For Synchronous Machinestyc1986Încă nu există evaluări
- Ed Lab ManualDocument27 paginiEd Lab ManualBonnieÎncă nu există evaluări
- Speed Control of Single Phase Induction Motor by Android Application Using Wi FiDocument3 paginiSpeed Control of Single Phase Induction Motor by Android Application Using Wi FiInternational Journal of Innovative Science and Research TechnologyÎncă nu există evaluări
- PSIM MANUAL For StudentsDocument23 paginiPSIM MANUAL For StudentsSomnath Khamaru75% (4)
- Full Paper P-031Document9 paginiFull Paper P-031SUBRATA BISWASÎncă nu există evaluări
- Synchronous Motor Drives: Open Loop V/F Control of Synchronous MotorDocument11 paginiSynchronous Motor Drives: Open Loop V/F Control of Synchronous MotorSaish Dalvi100% (1)
- MRDocument15 paginiMRSuresh UmadiÎncă nu există evaluări
- Applied Directly To The Stator WindingsDocument62 paginiApplied Directly To The Stator WindingsZekarias tenawÎncă nu există evaluări
- Synchronous Machines PDFDocument49 paginiSynchronous Machines PDFPradeep_VashistÎncă nu există evaluări
- Industrial Training Presentation ROHIT YADAVDocument15 paginiIndustrial Training Presentation ROHIT YADAVROHIT YADAVÎncă nu există evaluări
- 220V DC System at Thermal Power StationDocument6 pagini220V DC System at Thermal Power Stationm khÎncă nu există evaluări
- Speed Control of Induction Motors - 2 PDFDocument22 paginiSpeed Control of Induction Motors - 2 PDFZariz ZakianÎncă nu există evaluări
- Dcmotors and Their RepresentationDocument61 paginiDcmotors and Their RepresentationSoeprapto AtmariÎncă nu există evaluări
- Torsion Testing MachineDocument5 paginiTorsion Testing Machinegosaye desalegnÎncă nu există evaluări
- Chp5 DC Motor DrivesDocument38 paginiChp5 DC Motor Drivesblaze emberÎncă nu există evaluări
- Synchronous MotorsDocument27 paginiSynchronous MotorsSyed Muhammad Munavvar Hussain50% (2)
- Synchronous MotorDocument33 paginiSynchronous Motorvnyshreyas100% (2)
- Synchronous MotorDocument21 paginiSynchronous MotorAlaine Jan de TablanÎncă nu există evaluări
- SSD Processor Based DrivesDocument43 paginiSSD Processor Based DrivesNitishÎncă nu există evaluări
- SSD Digital Technology in Speed ControlDocument23 paginiSSD Digital Technology in Speed ControlNitishÎncă nu există evaluări
- PicDocument37 paginiPicNitishÎncă nu există evaluări
- Power Electronics SystemDocument32 paginiPower Electronics SystemNitishÎncă nu există evaluări
- Power Electronics SystemDocument32 paginiPower Electronics SystemNitishÎncă nu există evaluări
- Career PathDocument24 paginiCareer PathMandrata LimdrawanÎncă nu există evaluări
- Transport Phenomena PaperDocument4 paginiTransport Phenomena Paperbhaskar5377100% (1)
- Bebin Field OperatorDocument5 paginiBebin Field Operatorjohn MÎncă nu există evaluări
- Manuale MecwayDocument141 paginiManuale MecwayD BÎncă nu există evaluări
- Instruction Manual Unique Sanitary Mixproof Valve Including Us Version Ese00923enDocument120 paginiInstruction Manual Unique Sanitary Mixproof Valve Including Us Version Ese00923enAnonymous KdnOsd9Încă nu există evaluări
- Ufgs 41 22 13.15Document60 paginiUfgs 41 22 13.15Abdul wahid ButtÎncă nu există evaluări
- Diesel Cycle: P-V Diagram T-S DiagramDocument3 paginiDiesel Cycle: P-V Diagram T-S DiagramJJ100% (1)
- 12 06 Digital Turbine Governor PDFDocument5 pagini12 06 Digital Turbine Governor PDFRidwanvascoÎncă nu există evaluări
- Flexural Retrofitting With SIMCONDocument21 paginiFlexural Retrofitting With SIMCONSuppayarn DechpormsukÎncă nu există evaluări
- Application Note Synchronous Motors For Air Separation EN 9AKK105807 122012 FINAL LR PDFDocument2 paginiApplication Note Synchronous Motors For Air Separation EN 9AKK105807 122012 FINAL LR PDFksvvijÎncă nu există evaluări
- Psychrometric Chart EditedDocument1 paginăPsychrometric Chart EditedMelord RoneÎncă nu există evaluări
- SC30T MichaelDocument3 paginiSC30T Michaelmichaelmerlan0% (1)
- Emp 006Document2 paginiEmp 006Brian FreemanÎncă nu există evaluări
- Volvo Edc III Tad 1241 2 Workshop ManualDocument7 paginiVolvo Edc III Tad 1241 2 Workshop Manualmary100% (55)
- POGIL - Work, Power, and Kinetic Energy PDFDocument5 paginiPOGIL - Work, Power, and Kinetic Energy PDFEMERSON QUICHE VELASQUEZÎncă nu există evaluări
- Tpd1357e1 PDFDocument68 paginiTpd1357e1 PDFAndres Lema100% (1)
- Range Rover Manual Service ToolsDocument10 paginiRange Rover Manual Service ToolsLouise RogersÎncă nu există evaluări
- Simulation of ExcavationDocument13 paginiSimulation of Excavationnishan_ravinÎncă nu există evaluări
- ABC 5X-MillingDocument28 paginiABC 5X-Milling이종훈Încă nu există evaluări
- Automatic Float Switches 836 Series ABDocument37 paginiAutomatic Float Switches 836 Series ABJorge ReyesÎncă nu există evaluări
- TM 55 1905 223 24 2 PDFDocument127 paginiTM 55 1905 223 24 2 PDFMohamed HmayenÎncă nu există evaluări
- Hi-Lo and PRO-1 Pan Feeder PartsDocument86 paginiHi-Lo and PRO-1 Pan Feeder Partssergiu20Încă nu există evaluări
- Bombas Vácuo PDFDocument199 paginiBombas Vácuo PDFMarcos Roberto Cardoso0% (1)
- Noc18 Ce23 Assignment2 PDFDocument4 paginiNoc18 Ce23 Assignment2 PDFrichard kwofieÎncă nu există evaluări
- Iso 679 2009Document12 paginiIso 679 2009HanifÎncă nu există evaluări
- MAI/Prime Parts 5736 North Michigan Road Indianapolis, IN 46228 317-257-6811 317-257-1590 FaxDocument14 paginiMAI/Prime Parts 5736 North Michigan Road Indianapolis, IN 46228 317-257-6811 317-257-1590 FaxBhethhoÎncă nu există evaluări
- Raw Mill Patroller Checklist Route 1Document5 paginiRaw Mill Patroller Checklist Route 1AbasiemekaÎncă nu există evaluări
- Atc 40Document346 paginiAtc 40Johana PradoÎncă nu există evaluări
- Gas Laws Pre-AssessmentDocument3 paginiGas Laws Pre-Assessmentapi-573214664Încă nu există evaluări
- A Study On A Control Method With A Ventilation Requirement of A VAV System in Multi-ZoneDocument3 paginiA Study On A Control Method With A Ventilation Requirement of A VAV System in Multi-Zonepsn_kylmÎncă nu există evaluări