S-ar putea să vă placă și
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- DR Next Closest Prime Δncp Prime Number GenerationDocument2 paginiDR Next Closest Prime Δncp Prime Number GenerationTomÎncă nu există evaluări
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Evaluation Matrix TemplateDocument4 paginiEvaluation Matrix TemplateTomÎncă nu există evaluări
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- MA 126 Quiz 5 6/10/2013Document1 paginăMA 126 Quiz 5 6/10/2013TomÎncă nu există evaluări
- How To Write ProposalsDocument5 paginiHow To Write ProposalsTomÎncă nu există evaluări
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- Soil Mechanics Lecture Notes PDFDocument177 paginiSoil Mechanics Lecture Notes PDFTom100% (1)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- MA 126 Quiz 4 Makeup 6/17/2013Document1 paginăMA 126 Quiz 4 Makeup 6/17/2013TomÎncă nu există evaluări
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- CE315-Group 8-Lab Report 5 - Mix Design and Trial Batching (10!25!2015)Document8 paginiCE315-Group 8-Lab Report 5 - Mix Design and Trial Batching (10!25!2015)TomÎncă nu există evaluări
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
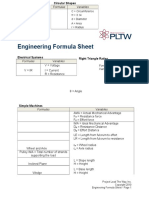
- Engineering Formula Sheet: Formulas VariablesDocument4 paginiEngineering Formula Sheet: Formulas VariablesTomÎncă nu există evaluări
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- CE315-Group 8-Lab Report 4 - Gradation AnalysisDocument13 paginiCE315-Group 8-Lab Report 4 - Gradation AnalysisTomÎncă nu există evaluări
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Bulk Dry S - G . Dry Weight Ssdweight Weight H O) A B CDocument4 paginiBulk Dry S - G . Dry Weight Ssdweight Weight H O) A B CTomÎncă nu există evaluări
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Differential LevelingDocument5 paginiDifferential LevelingTom100% (1)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- dP dz γDocument6 paginidP dz γTomÎncă nu există evaluări
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- a V ∂V ds, a V R D Dt ∂ ∂t u ∂ ∂ x v ∂ ∂ y w ∂ ∂ z dy dx v u ρ V A ρV A P A P A W+FDocument1 paginăa V ∂V ds, a V R D Dt ∂ ∂t u ∂ ∂ x v ∂ ∂ y w ∂ ∂ z dy dx v u ρ V A ρV A P A P A W+FTomÎncă nu există evaluări
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
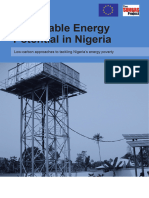
- Renewable Energy Potential in Nigeria: Low-Carbon Approaches To Tackling Nigeria's Energy PovertyDocument36 paginiRenewable Energy Potential in Nigeria: Low-Carbon Approaches To Tackling Nigeria's Energy PovertyOloyede JeremiahÎncă nu există evaluări
- f3 PhysicsDocument2 paginif3 PhysicsAbby YiuÎncă nu există evaluări
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- Appendix - Properties of FluidDocument5 paginiAppendix - Properties of FluidM Syafiq SamadÎncă nu există evaluări
- Growatt Min 5000tlxDocument2 paginiGrowatt Min 5000tlxMatheus FariasÎncă nu există evaluări
- Martin de WitDocument200 paginiMartin de WitDimitris Sampatakos100% (1)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (345)
- Chapter 4: The First Law of Thermodynamics For Control Volumes B) Steam Power PlantsDocument8 paginiChapter 4: The First Law of Thermodynamics For Control Volumes B) Steam Power PlantsTHEOPHILUS ATO FLETCHERÎncă nu există evaluări
- Data Sheet: 200Mw Sod-523 Surface MountDocument4 paginiData Sheet: 200Mw Sod-523 Surface MountStuxnetÎncă nu există evaluări
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- Ceiling FanDocument6 paginiCeiling Fanswaggerz95Încă nu există evaluări
- Switched Mode Regulated Power Supply (SMPS)Document36 paginiSwitched Mode Regulated Power Supply (SMPS)Vipin NathÎncă nu există evaluări
- LA4 Ohm's LawDocument20 paginiLA4 Ohm's LawHanna GalinatoÎncă nu există evaluări
- 1953-Schonfeld-Analogy of Hydraulic, Mechanical, Acoustic and Electric SystemsDocument34 pagini1953-Schonfeld-Analogy of Hydraulic, Mechanical, Acoustic and Electric SystemsAndres PalacioÎncă nu există evaluări
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- Transformer Pocket GuideDocument6 paginiTransformer Pocket Guiderupesh1000Încă nu există evaluări
- SENTRON Residual Current Protective Devices AFDDs Complete English 10 2014 201502111453105536Document50 paginiSENTRON Residual Current Protective Devices AFDDs Complete English 10 2014 201502111453105536Alvaro Coy H.Încă nu există evaluări
- JOURNEYMAN CLOSED BOOK EXAM#02 (v2.0)Document52 paginiJOURNEYMAN CLOSED BOOK EXAM#02 (v2.0)E.G Boy GudaÎncă nu există evaluări
- Transmission TowerDocument11 paginiTransmission TowerSantosh Rai100% (3)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- PDFDocument9 paginiPDFjayonline_4uÎncă nu există evaluări
- List of Existing Power Plants List of Existing Power Plants (Grid-Connected) As of June 2020Document4 paginiList of Existing Power Plants List of Existing Power Plants (Grid-Connected) As of June 2020Pedro GojoÎncă nu există evaluări
- Tutorial 1 PDFDocument4 paginiTutorial 1 PDFSalihah AbdullahÎncă nu există evaluări
- ABB Publication 1MRK509015-BEN C en High Impedance Differential Relay RADHADocument5 paginiABB Publication 1MRK509015-BEN C en High Impedance Differential Relay RADHAjavedsmg1Încă nu există evaluări
- Boiling and Condensation 1Document48 paginiBoiling and Condensation 1hasan bish100% (1)
- Sample Test Using Auto-ChekerDocument3 paginiSample Test Using Auto-ChekerJhon Aliangan MayuyoÎncă nu există evaluări
- Powder Technology: Yuan Yu, Wenjing Ren, Jiaxiang LiuDocument5 paginiPowder Technology: Yuan Yu, Wenjing Ren, Jiaxiang Liudavibraga8041Încă nu există evaluări
- Experiment 2: Vector AdditionDocument45 paginiExperiment 2: Vector Additionamcb_003Încă nu există evaluări
- Properties of Fluids PDFDocument14 paginiProperties of Fluids PDFmaestro100% (3)
- 2016 Dse Phy 1Document31 pagini2016 Dse Phy 1RAKIB AL MAHDIÎncă nu există evaluări
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Module 1 Introduction To Chemistry Matter and MeasurementDocument13 paginiModule 1 Introduction To Chemistry Matter and MeasurementMichael Jerwin AbellaÎncă nu există evaluări
- 2-Phase Stepper Motor Driver: DescriptionDocument9 pagini2-Phase Stepper Motor Driver: Descriptiondanielu79Încă nu există evaluări
- Introduction of Sieyuan 2021Document55 paginiIntroduction of Sieyuan 2021Dalibor Markovic100% (1)
- ECT Inspection Technique: Theory and General ConceptsDocument9 paginiECT Inspection Technique: Theory and General ConceptsKvanan78Încă nu există evaluări
- Power Electronics For Renewable Energy, Smart Grids: - Chunyan An - Pooja ShahDocument23 paginiPower Electronics For Renewable Energy, Smart Grids: - Chunyan An - Pooja ShahaliÎncă nu există evaluări