S-ar putea să vă placă și
- EE207 Sept-Oct 2016 Chapter 002Document24 paginiEE207 Sept-Oct 2016 Chapter 002Harkishen SinghÎncă nu există evaluări
- Research Paper - Biped RobotDocument6 paginiResearch Paper - Biped RobotHarkishen SinghÎncă nu există evaluări
- RS Based SCADA System For Longer Distance Powered Devices PDFDocument7 paginiRS Based SCADA System For Longer Distance Powered Devices PDFHarkishen SinghÎncă nu există evaluări
- Tissue Engineering: Tissue Engineering Is The in Vitro Development (Growth) of TissuesDocument18 paginiTissue Engineering: Tissue Engineering Is The in Vitro Development (Growth) of TissuesHarkishen SinghÎncă nu există evaluări
- 6th Central Pay Commission Salary CalculatorDocument15 pagini6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- EE207 Sept-Oct 2016 Chapter 001Document22 paginiEE207 Sept-Oct 2016 Chapter 001Harkishen SinghÎncă nu există evaluări
- Soccer Robots 2005 Final Report PDFDocument120 paginiSoccer Robots 2005 Final Report PDFHarkishen SinghÎncă nu există evaluări
- Selection of Electric Motor For EVDocument6 paginiSelection of Electric Motor For EVaerobeetleÎncă nu există evaluări
- Power System Assignment Solution May-Aug 2013Document4 paginiPower System Assignment Solution May-Aug 2013Harkishen SinghÎncă nu există evaluări
- Ee408 Power Systems: Chapter 5 (A) : Balanced Faults Prepared By: Engr. Harkishen SinghDocument7 paginiEe408 Power Systems: Chapter 5 (A) : Balanced Faults Prepared By: Engr. Harkishen SinghHarkishen SinghÎncă nu există evaluări
- Lecture 13Document19 paginiLecture 13Harkishen SinghÎncă nu există evaluări
- Ee408 Power Systems: Chapter 5 (A) : Balanced Faults Prepared By: Engr. Harkishen SinghDocument7 paginiEe408 Power Systems: Chapter 5 (A) : Balanced Faults Prepared By: Engr. Harkishen SinghHarkishen SinghÎncă nu există evaluări
- School of Engineering Ee205: Engineering Software and Its ApplicationDocument3 paginiSchool of Engineering Ee205: Engineering Software and Its ApplicationHarkishen SinghÎncă nu există evaluări
- Comparison of Performance of Switched Reluctance MotorsDocument139 paginiComparison of Performance of Switched Reluctance MotorsSatyajit DasÎncă nu există evaluări
- EE004 Fhs LNT 003 Chapter 1 Jan11Document37 paginiEE004 Fhs LNT 003 Chapter 1 Jan11Harkishen SinghÎncă nu există evaluări
- 25 Permanent Magnet Motor Design PDFDocument39 pagini25 Permanent Magnet Motor Design PDFbitconcepts60% (5)
- Assignment 1 Requirements: Ee408 Power Systems Usci University May-Aug 2013Document2 paginiAssignment 1 Requirements: Ee408 Power Systems Usci University May-Aug 2013Harkishen SinghÎncă nu există evaluări
- Co-Op Final ReportDocument5 paginiCo-Op Final ReportHarkishen SinghÎncă nu există evaluări
- LabManual 004Document7 paginiLabManual 004Harkishen SinghÎncă nu există evaluări
- Assignment 1 (May-Aug2013)Document2 paginiAssignment 1 (May-Aug2013)Harkishen SinghÎncă nu există evaluări
- Assignment 3 Requirements: Ee408 Power Systems Usci University May-Aug 2013Document2 paginiAssignment 3 Requirements: Ee408 Power Systems Usci University May-Aug 2013Harkishen SinghÎncă nu există evaluări
- Final Year Project TitlesDocument1 paginăFinal Year Project TitlesHarkishen SinghÎncă nu există evaluări
- LabManual 002Document5 paginiLabManual 002Harkishen SinghÎncă nu există evaluări
- Buck Boost SnubberDocument9 paginiBuck Boost Snubberminh_huyÎncă nu există evaluări
- Power Systems: Power Systems Undervoltage and Overvoltage Time Lag RelaysDocument4 paginiPower Systems: Power Systems Undervoltage and Overvoltage Time Lag RelaysHarkishen SinghÎncă nu există evaluări
- LabManual 002Document5 paginiLabManual 002Harkishen SinghÎncă nu există evaluări
- LabManual 001Document10 paginiLabManual 001Harkishen SinghÎncă nu există evaluări
- Power Electronics Lab ManualDocument37 paginiPower Electronics Lab ManualDawod Shaaban Al-SulifanieÎncă nu există evaluări
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- DSASW00375052Document22 paginiDSASW00375052RodríguezÎncă nu există evaluări
- A2125040331 - 14289 - 12 - 2018 - Transformer & MotorDocument97 paginiA2125040331 - 14289 - 12 - 2018 - Transformer & MotorRaj RathoreÎncă nu există evaluări
- Series NMV Leaflet English Ed06!04!680868Document2 paginiSeries NMV Leaflet English Ed06!04!680868mahesh reddy mÎncă nu există evaluări
- Assignment 1: Electrical Machines-Ii (Elpc402)Document1 paginăAssignment 1: Electrical Machines-Ii (Elpc402)Abishek BhardwajÎncă nu există evaluări
- STVF5 Trouble REV0 PDFDocument42 paginiSTVF5 Trouble REV0 PDFUpien Ayah MahardikaÎncă nu există evaluări
- Ft. String Box. 2-2-1 PDFDocument1 paginăFt. String Box. 2-2-1 PDFSophiaÎncă nu există evaluări
- Surge Arrester: Structure and FunctionDocument4 paginiSurge Arrester: Structure and FunctionRishi SharmaÎncă nu există evaluări
- Silicon-Controlled Rectifier Phase Control: ObjectivesDocument4 paginiSilicon-Controlled Rectifier Phase Control: ObjectivesSTO. TOMAS SHAIRA FRESCOÎncă nu există evaluări
- Philippine Electrical Code Table 9.1.1.9 AC Resistance Reactance TableDocument1 paginăPhilippine Electrical Code Table 9.1.1.9 AC Resistance Reactance TableGlasee GoweeÎncă nu există evaluări
- 10 - Earth Fault ProtectionDocument18 pagini10 - Earth Fault ProtectionCorey PorterÎncă nu există evaluări
- GV2 GV3 GV7 Motor Circuit BreakersDocument91 paginiGV2 GV3 GV7 Motor Circuit BreakersebenazzouzÎncă nu există evaluări
- IE Rules PDFDocument5 paginiIE Rules PDFSangramjit SarkarÎncă nu există evaluări
- 312D AND 313D LGP Excavator Electrical System: View of Area G'Document2 pagini312D AND 313D LGP Excavator Electrical System: View of Area G'Yvan Vidal Calapuja MachacaÎncă nu există evaluări
- Induction Generators With Squirrel-Cage Rotors Used in Wind TurbinesDocument11 paginiInduction Generators With Squirrel-Cage Rotors Used in Wind TurbinesFitiu IoanÎncă nu există evaluări
- Brushless DDocument11 paginiBrushless DAkash NiwalÎncă nu există evaluări
- K. S. R. College of Engineering, Tiruchengode - 637 215: Internal Assesement Test IiDocument2 paginiK. S. R. College of Engineering, Tiruchengode - 637 215: Internal Assesement Test IiVeeramaniÎncă nu există evaluări
- Practical ElectricityDocument18 paginiPractical ElectricityJamaica RamosÎncă nu există evaluări
- TS0009 - Trench Section AC R04Document1 paginăTS0009 - Trench Section AC R04Juan Carlos CastroÎncă nu există evaluări
- DC Molded Case BreakersDocument6 paginiDC Molded Case BreakersMrÎncă nu există evaluări
- Competencies Taught Updated g11 Eim NC IIDocument3 paginiCompetencies Taught Updated g11 Eim NC IIfrancisco macatugobÎncă nu există evaluări
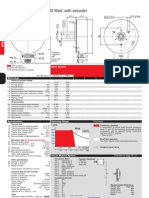
- Maxon EC90 Flat 90watt With EncoderDocument1 paginăMaxon EC90 Flat 90watt With EncoderElectromateÎncă nu există evaluări
- FM-203 Instruction Manual 2019.12.05Document28 paginiFM-203 Instruction Manual 2019.12.05Luis SBÎncă nu există evaluări
- Automatic Water Pump Controller - Full Circuit AvailableDocument4 paginiAutomatic Water Pump Controller - Full Circuit AvailableclementÎncă nu există evaluări
- Feature: CONCEPT Repair Data BaseDocument4 paginiFeature: CONCEPT Repair Data BaseRaul Trujillo PÎncă nu există evaluări
- Introduction To TransformerDocument4 paginiIntroduction To TransformerKing EverestÎncă nu există evaluări
- Ceiling Fan Motor AnalysisDocument16 paginiCeiling Fan Motor AnalysisPartha Das50% (2)
- Aveo 1.6Document31 paginiAveo 1.6Lojan Coronel José Humberto71% (7)
- SKDIR 520 Trafo TenagaDocument137 paginiSKDIR 520 Trafo TenagaAisyah Laras NandiniÎncă nu există evaluări
- Um Inverex (Z)Document11 paginiUm Inverex (Z)Sayed Kifayat Hussain NaqviÎncă nu există evaluări
- Module 4 B2Document24 paginiModule 4 B2ozankacmazÎncă nu există evaluări