S-ar putea să vă placă și
- Quarter 1 - Module 1: To Computer Programming: (Special Science Class)Document24 paginiQuarter 1 - Module 1: To Computer Programming: (Special Science Class)h1dan100% (6)
- CNSSI-1253F Cross Domain Solution OverlayDocument13 paginiCNSSI-1253F Cross Domain Solution OverlayMitch QuinnÎncă nu există evaluări
- Tinyos Tutorial: Cs580S Sensor Networks and Systems February 7, 2007 Jisu Oh Dept. of Computer Science Suny-BinghamtonDocument45 paginiTinyos Tutorial: Cs580S Sensor Networks and Systems February 7, 2007 Jisu Oh Dept. of Computer Science Suny-Binghamtonpudn0% (1)
- Dcs Training-BasicDocument96 paginiDcs Training-BasicPuneet Bachal100% (2)
- Distributed Control System (DCS)Document96 paginiDistributed Control System (DCS)Abdul RawoofÎncă nu există evaluări
- Title of Topic: MODULE 2 - Course Title: Distributed Systems Faculty Name: Ms. P. DivyaDocument26 paginiTitle of Topic: MODULE 2 - Course Title: Distributed Systems Faculty Name: Ms. P. Divyavarun aÎncă nu există evaluări
- Unit 5Document121 paginiUnit 5savsen6720Încă nu există evaluări
- RtosDocument37 paginiRtosnikhat khanÎncă nu există evaluări
- Tinyos Tutorial: Chien-Liang Fok Cs521 Fall 2004Document72 paginiTinyos Tutorial: Chien-Liang Fok Cs521 Fall 2004Uday KulkarniÎncă nu există evaluări
- 2017edan85l4 1Document33 pagini2017edan85l4 1Ly TrầnÎncă nu există evaluări
- CS 194: Distributed Systems Processes, Threads, Code MigrationDocument26 paginiCS 194: Distributed Systems Processes, Threads, Code MigrationShivakumar BarupatiÎncă nu există evaluări
- Course Outline Overall Structure of RT Systems: A Clock!Document4 paginiCourse Outline Overall Structure of RT Systems: A Clock!Pranava PranuÎncă nu există evaluări
- NOC Network ManagmentDocument70 paginiNOC Network ManagmentLuis Mejia Garcia100% (1)
- 07 Creating A System Call in LinuxDocument22 pagini07 Creating A System Call in LinuxShraddha PatilÎncă nu există evaluări
- Real-Time Operating Systems: Dayang Norhayati Abang JawawiDocument21 paginiReal-Time Operating Systems: Dayang Norhayati Abang JawawiJonny MestamiaÎncă nu există evaluări
- Chapter - 7 Network SimulatorDocument69 paginiChapter - 7 Network SimulatorEtemu kifleÎncă nu există evaluări
- 2, I) Real Time OS 1Document16 pagini2, I) Real Time OS 1Arjun KelothuÎncă nu există evaluări
- T&SS Lecture-6Document41 paginiT&SS Lecture-6sarim imranÎncă nu există evaluări
- Simulators For Sensor Networks: Sagnik Bhattacharya 9/12/2001Document37 paginiSimulators For Sensor Networks: Sagnik Bhattacharya 9/12/2001Vũ Tiến ViệtÎncă nu există evaluări
- RTOSDocument28 paginiRTOSJeffersonÎncă nu există evaluări
- Slides 03Document22 paginiSlides 03Nauseeta LalÎncă nu există evaluări
- Gridka School SDNDocument55 paginiGridka School SDNsiddharthaÎncă nu există evaluări
- TinyOS Nesc PDFDocument29 paginiTinyOS Nesc PDFGowriÎncă nu există evaluări
- ITCE 720A Autonomic Wireless Networking (Fall, 2009)Document24 paginiITCE 720A Autonomic Wireless Networking (Fall, 2009)Souhila SelmaÎncă nu există evaluări
- Unit IDocument25 paginiUnit ISwastikÎncă nu există evaluări
- The UART Project: Applying What We've Learned About Linux Device-Drivers To The PC's Serial-Port ControllerDocument43 paginiThe UART Project: Applying What We've Learned About Linux Device-Drivers To The PC's Serial-Port ControllerPradeep KumarÎncă nu există evaluări
- Embedded Systems: Sighandler To Create A Signal Handler Corresponding To A SignalDocument3 paginiEmbedded Systems: Sighandler To Create A Signal Handler Corresponding To A SignalAssini HussainÎncă nu există evaluări
- Concept of Real Time OSDocument29 paginiConcept of Real Time OSVignesh waranÎncă nu există evaluări
- Embedded Systems:: G P Computer SystemDocument21 paginiEmbedded Systems:: G P Computer SystemMonu ChouhanÎncă nu există evaluări
- WSN FinalDocument33 paginiWSN FinalSLngerÎncă nu există evaluări
- Rtos PDFDocument33 paginiRtos PDFrasagna sarangaÎncă nu există evaluări
- Lecture 5: Unix Startup Configuration: Asoc. Prof. Guntis Barzdins Asist. Girts FolkmanisDocument96 paginiLecture 5: Unix Startup Configuration: Asoc. Prof. Guntis Barzdins Asist. Girts FolkmanisrosshushÎncă nu există evaluări
- CICS-PPT-1-Introduction - Online Business Environment V1.1Document23 paginiCICS-PPT-1-Introduction - Online Business Environment V1.1NagfaceÎncă nu există evaluări
- Modified New Embedded SystemsDocument36 paginiModified New Embedded SystemsPriya KosuriÎncă nu există evaluări
- Real Time Operating SystemDocument37 paginiReal Time Operating Systemalok kumar0% (1)
- Tinyos: Presented and Edited By: Dr. Rahul Saha Lovely Professional UniversityDocument22 paginiTinyos: Presented and Edited By: Dr. Rahul Saha Lovely Professional UniversitySri SriÎncă nu există evaluări
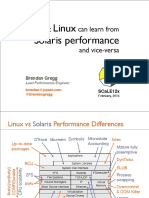
- SCaLE Linux Vs Solaris Performance2014 PDFDocument115 paginiSCaLE Linux Vs Solaris Performance2014 PDFs3m3staÎncă nu există evaluări
- Network Management: Network Management Involves Detecting and Correcting Problems That Make Communication InefficientDocument19 paginiNetwork Management: Network Management Involves Detecting and Correcting Problems That Make Communication Inefficientprakashreddy4007Încă nu există evaluări
- Opeationg Systems - Process Notion - Week 2Document24 paginiOpeationg Systems - Process Notion - Week 2Dali BelaibaÎncă nu există evaluări
- Software-Defined Networks: A Systems ApproachDocument38 paginiSoftware-Defined Networks: A Systems Approachlino CentenoÎncă nu există evaluări
- Vxworks - Final PDFDocument125 paginiVxworks - Final PDFBhanu Prakash K100% (1)
- TinyosDocument32 paginiTinyosSukesh Chandra KambleÎncă nu există evaluări
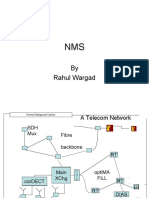
- By Rahul WargadDocument25 paginiBy Rahul WargadKailazhÎncă nu există evaluări
- Principles of System Software: Aditya Roy KarmakarDocument11 paginiPrinciples of System Software: Aditya Roy KarmakarAditya Roy karmakarÎncă nu există evaluări
- 2.3 Processor and Memory 2.4 Peripherals 2.5 Storage Devices 2.6 Putting Together The Hardware Components 2.7 Improving Computer PerformanceDocument46 pagini2.3 Processor and Memory 2.4 Peripherals 2.5 Storage Devices 2.6 Putting Together The Hardware Components 2.7 Improving Computer PerformanceSammy ModecaiÎncă nu există evaluări
- Performance Evaluation of Real-Time Operating Systems: Rtems, Rtlinux, EcosDocument31 paginiPerformance Evaluation of Real-Time Operating Systems: Rtems, Rtlinux, EcosAnand PatraÎncă nu există evaluări
- Software Defined Networking Software Defined Networking: CS 4226: Internet ArchitectureDocument41 paginiSoftware Defined Networking Software Defined Networking: CS 4226: Internet ArchitecturejmariachiÎncă nu există evaluări
- Computer Systems ConceptsDocument30 paginiComputer Systems ConceptsRetno Nilam SariÎncă nu există evaluări
- Control Design: 5.1 Basic ConceptsDocument7 paginiControl Design: 5.1 Basic ConceptsAnneÎncă nu există evaluări
- ARM RTX Real-Time Operating SystemDocument67 paginiARM RTX Real-Time Operating SystemLauren LoveÎncă nu există evaluări
- Systems I: Performance AnalysisDocument20 paginiSystems I: Performance Analysisdarwinvargas2011Încă nu există evaluări
- UNIT 5 - SNMP and RMON PDFDocument60 paginiUNIT 5 - SNMP and RMON PDFbalagsivaÎncă nu există evaluări
- Ns 3 Workshop Part1Document38 paginiNs 3 Workshop Part1Jio Hendro100% (1)
- Customer Information Control SystemDocument25 paginiCustomer Information Control Systembala1686Încă nu există evaluări
- SDNDocument57 paginiSDNvrtrivedi86Încă nu există evaluări
- WSN Unit 5Document22 paginiWSN Unit 5chethan skÎncă nu există evaluări
- High Performance ComputingDocument61 paginiHigh Performance ComputingShrey Thakur100% (1)
- SDN & NFV IntroductionDocument72 paginiSDN & NFV Introductionmahmoud_shukur1447Încă nu există evaluări
- On Using Tasklets': An Example of The Linux Kernel's Tasklet' Mechanism For Deferring Some Interrupt-Handling WorkDocument21 paginiOn Using Tasklets': An Example of The Linux Kernel's Tasklet' Mechanism For Deferring Some Interrupt-Handling Workggsdm sngs mmtÎncă nu există evaluări
- CISCO PACKET TRACER LABS: Best practice of configuring or troubleshooting NetworkDe la EverandCISCO PACKET TRACER LABS: Best practice of configuring or troubleshooting NetworkÎncă nu există evaluări
- Practical Data Acquisition for Instrumentation and Control SystemsDe la EverandPractical Data Acquisition for Instrumentation and Control SystemsÎncă nu există evaluări
- Resume: Saravanakumar E Mobile: 7373887171 / 9384228204 Career ObjectiveDocument2 paginiResume: Saravanakumar E Mobile: 7373887171 / 9384228204 Career ObjectivePradheepKumar_RÎncă nu există evaluări
- Nokia 3 Vs Nokia 5 Vs Nokia 6 - Which Nokia Android Phone Is Right For You - NDTV Gadgets360 PDFDocument5 paginiNokia 3 Vs Nokia 5 Vs Nokia 6 - Which Nokia Android Phone Is Right For You - NDTV Gadgets360 PDFPradheepKumar_RÎncă nu există evaluări
- Business Proposal ScriptDocument2 paginiBusiness Proposal ScriptPradheepKumar_RÎncă nu există evaluări
- Power Plate 7: With 6 USB Port + 8 Power Sockets Power ConverterDocument1 paginăPower Plate 7: With 6 USB Port + 8 Power Sockets Power ConverterPradheepKumar_RÎncă nu există evaluări
- Driver Salary ReceiptDocument1 paginăDriver Salary ReceiptPradheepKumar_RÎncă nu există evaluări
- Crash Course in PythonDocument30 paginiCrash Course in PythonEdiga VenkatadriÎncă nu există evaluări
- Print 3Document2 paginiPrint 3PradheepKumar_RÎncă nu există evaluări
- AssignmentDocument6 paginiAssignmentPradheepKumar_RÎncă nu există evaluări
- 13IT87 Exp 1Document1 pagină13IT87 Exp 1PradheepKumar_RÎncă nu există evaluări
- Base PaperDocument5 paginiBase PaperPradheepKumar_RÎncă nu există evaluări
- Online Blood Donation Management System ABSTRACTDocument2 paginiOnline Blood Donation Management System ABSTRACTLOGIC SYSTEMSÎncă nu există evaluări
- x3rgrth: ThfybjyujDocument1 paginăx3rgrth: ThfybjyujPradheepKumar_RÎncă nu există evaluări
- Hello Everyone This Is Sample File Do Not Download The File: AnonymousDocument1 paginăHello Everyone This Is Sample File Do Not Download The File: AnonymousPradheepKumar_RÎncă nu există evaluări
- ANNA University All Engineering Books LinksDocument12 paginiANNA University All Engineering Books LinksPradheepKumar_RÎncă nu există evaluări
- AwcdsDocument3 paginiAwcdsPradheepKumar_RÎncă nu există evaluări
- Final Review 1Document23 paginiFinal Review 1PradheepKumar_RÎncă nu există evaluări
- DMDW NotesDocument62 paginiDMDW NotesJohn William100% (1)
- Refecrth: xrt45t54Document1 paginăRefecrth: xrt45t54PradheepKumar_RÎncă nu există evaluări
- Refecrth: xrt45t54Document1 paginăRefecrth: xrt45t54PradheepKumar_RÎncă nu există evaluări
- New Microsoft Office PowerPoint PresentationDocument1 paginăNew Microsoft Office PowerPoint PresentationPradheepKumar_RÎncă nu există evaluări
- New Microsoft Office PowerPoint PresentationDocument1 paginăNew Microsoft Office PowerPoint PresentationPradheepKumar_RÎncă nu există evaluări
- x3rgrth: ThfybjyujDocument1 paginăx3rgrth: ThfybjyujPradheepKumar_RÎncă nu există evaluări
- Online Blood Donation Management System ABSTRACTDocument2 paginiOnline Blood Donation Management System ABSTRACTLOGIC SYSTEMSÎncă nu există evaluări
- New Microsoft Office PowerPoint PresentationDocument1 paginăNew Microsoft Office PowerPoint PresentationPradheepKumar_RÎncă nu există evaluări
- Hai Everyone To Sucess: Qerwwgx4xrgwgrxfr4g4tg4wr GDocument1 paginăHai Everyone To Sucess: Qerwwgx4xrgwgrxfr4g4tg4wr GPradheepKumar_RÎncă nu există evaluări
- ANNA University All Engineering Books LinksDocument12 paginiANNA University All Engineering Books LinksPradheepKumar_RÎncă nu există evaluări
- SaveDocument1 paginăSavePradheepKumar_RÎncă nu există evaluări
- SaveDocument1 paginăSavePradheepKumar_RÎncă nu există evaluări
- MA300-BT: Metallic Casing Outdoor Access ControlDocument2 paginiMA300-BT: Metallic Casing Outdoor Access ControljoelbravobritoÎncă nu există evaluări
- Small Office Cionre Arce: Takhg Your ButintDocument48 paginiSmall Office Cionre Arce: Takhg Your ButintthecomputerpaperÎncă nu există evaluări
- Chapter 1 Part 1 SRWE - Module - 15 IP Static RoutingDocument45 paginiChapter 1 Part 1 SRWE - Module - 15 IP Static RoutingLAN BIN CHENÎncă nu există evaluări
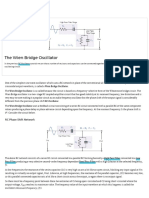
- Wien Bridge Oscillator Tutorial and TheoryDocument9 paginiWien Bridge Oscillator Tutorial and TheoryemilfrancuÎncă nu există evaluări
- HandPunch Reader Cross - Reference ChartDocument2 paginiHandPunch Reader Cross - Reference Chartjduran_65Încă nu există evaluări
- ECEG-4221 VLSI Design: Addis Ababa Institute of Technology (AAIT) Department of Electrical and Computer EngineeringDocument18 paginiECEG-4221 VLSI Design: Addis Ababa Institute of Technology (AAIT) Department of Electrical and Computer EngineeringNuhamin BirhanuÎncă nu există evaluări
- Axiocam 105 Color - User GuideDocument21 paginiAxiocam 105 Color - User GuideSinan ChenÎncă nu există evaluări
- Cisco V6 Exam Answer NotesDocument10 paginiCisco V6 Exam Answer NotesYasin ArafatÎncă nu există evaluări
- Mobile WalkthroughDocument26 paginiMobile WalkthroughRainanda MarselÎncă nu există evaluări
- Digital Techniques Complete ManualDocument98 paginiDigital Techniques Complete ManualARSLAN IJAZÎncă nu există evaluări
- 42MF130A-37 Mp1.1u - Aa - 312278515691 - enDocument89 pagini42MF130A-37 Mp1.1u - Aa - 312278515691 - enNorman TranÎncă nu există evaluări
- AtmDocument3 paginiAtmClash ClanÎncă nu există evaluări
- Functional ArrchitectureDocument5 paginiFunctional ArrchitectureliyomÎncă nu există evaluări
- Multifunction Meter (Mfm-02) : FeaturesDocument1 paginăMultifunction Meter (Mfm-02) : FeaturesBhageerathi SahuÎncă nu există evaluări
- Led TV: User ManualDocument2 paginiLed TV: User ManualAnonymous 74EiX2MzgcÎncă nu există evaluări
- VHFDocument1 paginăVHFCarlos CoelhoÎncă nu există evaluări
- Specifications For Metro Ethernet 13-Sdms-10Document30 paginiSpecifications For Metro Ethernet 13-Sdms-10ashrafÎncă nu există evaluări
- Scaling and Bandwidth-Parameterization Based Controller TuningDocument8 paginiScaling and Bandwidth-Parameterization Based Controller Tuninghamza mesaiÎncă nu există evaluări
- Ways To Install Windows 11Document3 paginiWays To Install Windows 11Ephrem ChernetÎncă nu există evaluări
- CN Lab Project PresentationDocument23 paginiCN Lab Project PresentationShahneel ShaykhÎncă nu există evaluări
- 1647 6044 1 PBDocument4 pagini1647 6044 1 PBAria Nurul HaqÎncă nu există evaluări
- TV BROCHURE CTE BroadcastDocument63 paginiTV BROCHURE CTE BroadcastRaul Angel Perez AbadÎncă nu există evaluări
- Tutorial de Logix ProDocument17 paginiTutorial de Logix ProAndres AguilarÎncă nu există evaluări
- Web Guide DO2000 PDFDocument34 paginiWeb Guide DO2000 PDFdeviprasadÎncă nu există evaluări
- Product Overview: NCP3170: Buck Regulator, Switching, PWM, 3.0 ADocument2 paginiProduct Overview: NCP3170: Buck Regulator, Switching, PWM, 3.0 ARadhamePerezÎncă nu există evaluări
- This Study Resource WasDocument1 paginăThis Study Resource WasMaria DewiÎncă nu există evaluări
- Project Based Learning 2019-20Document23 paginiProject Based Learning 2019-20TejashreeÎncă nu există evaluări
- Servomotors AmplifiersDocument82 paginiServomotors AmplifiersMarcos GerstnerÎncă nu există evaluări