S-ar putea să vă placă și
- 4101 - PowerGridVerif - WP - IR em XT Good PDFDocument14 pagini4101 - PowerGridVerif - WP - IR em XT Good PDFKhadar BashaÎncă nu există evaluări
- Calibre XRC Parasitic Extraction: 2017 Mentor Graphics CorporationDocument14 paginiCalibre XRC Parasitic Extraction: 2017 Mentor Graphics CorporationBai Nguyen NoiÎncă nu există evaluări
- Adventures in ASIC Digital DesignDocument85 paginiAdventures in ASIC Digital Designtariq786Încă nu există evaluări
- CH 5 NOTES - Data Organization and Descriptive StatisticsDocument32 paginiCH 5 NOTES - Data Organization and Descriptive StatisticsMila SmithÎncă nu există evaluări
- CP4P Week3 Course Preview ActivityDocument4 paginiCP4P Week3 Course Preview ActivityPresiÎncă nu există evaluări
- Asic Design Cadence DR D Gracia Nirmala RaniDocument291 paginiAsic Design Cadence DR D Gracia Nirmala RaniAdline RiniÎncă nu există evaluări
- Lecture25 Fpga ConcludeDocument33 paginiLecture25 Fpga Concludeapi-3834272100% (1)
- Introduction To Asics: Ni Logic Pvt. LTD., PuneDocument84 paginiIntroduction To Asics: Ni Logic Pvt. LTD., PuneankurÎncă nu există evaluări
- Eetop - CN 100 Power Tips For FPGA Designers Stavinov EvgeniDocument409 paginiEetop - CN 100 Power Tips For FPGA Designers Stavinov EvgeniywkaiÎncă nu există evaluări
- Soc Design FlowDocument16 paginiSoc Design FlowApoorva A.Încă nu există evaluări
- Network On ChipDocument6 paginiNetwork On ChipsoundsisterÎncă nu există evaluări
- Asic Design FlowDocument25 paginiAsic Design FlowKarishma PotnuruÎncă nu există evaluări
- QRC Extraction DsDocument5 paginiQRC Extraction DsLakshman YandapalliÎncă nu există evaluări
- How To Use Composite Current Source Modeling For Crosstalk Noise AnalysisDocument12 paginiHow To Use Composite Current Source Modeling For Crosstalk Noise AnalysisStudentÎncă nu există evaluări
- Physical DesignDocument52 paginiPhysical Designsandyp21Încă nu există evaluări
- Analog Mixed Signal Verification MethodologyDocument5 paginiAnalog Mixed Signal Verification MethodologySrikanthÎncă nu există evaluări
- Calibre Perc Ds PDFDocument2 paginiCalibre Perc Ds PDFashwini32Încă nu există evaluări
- Product How To Fully Utilize TSMC S 28HPC ProcessDocument8 paginiProduct How To Fully Utilize TSMC S 28HPC ProcessvpsampathÎncă nu există evaluări
- Vector-Based Peak Current Analysis During Wafer Test of Flip-Chip DesignsDocument206 paginiVector-Based Peak Current Analysis During Wafer Test of Flip-Chip DesignsLakshman YandapalliÎncă nu există evaluări
- PDDocument76 paginiPDKanhaiya MishraÎncă nu există evaluări
- PrimeTime 2011 Webinar-Advanced OCVDocument32 paginiPrimeTime 2011 Webinar-Advanced OCVSourabh Aditya SwarnkarÎncă nu există evaluări
- Interconnect Noise Optimization in Nanometer TechnologiesDocument145 paginiInterconnect Noise Optimization in Nanometer TechnologiesSmile NagsÎncă nu există evaluări
- Antenna Diode Vlsi Operation Positive ChargeDocument21 paginiAntenna Diode Vlsi Operation Positive ChargeNegin HashemiÎncă nu există evaluări
- Reference Manual: Date: 10/17/08Document31 paginiReference Manual: Date: 10/17/08Abhishek RanjanÎncă nu există evaluări
- Io PadsDocument5 paginiIo PadsKislay AnandÎncă nu există evaluări
- Expanding The Synopsys Primetime Solution With Power AnalysisDocument7 paginiExpanding The Synopsys Primetime Solution With Power AnalysisRamakrishnaRao SoogooriÎncă nu există evaluări
- Soc - Design ASIC+FPGADocument33 paginiSoc - Design ASIC+FPGAUtsav ParasharÎncă nu există evaluări
- Vlsi Cadence Tools Voltage Storm Vinai 2011Document8 paginiVlsi Cadence Tools Voltage Storm Vinai 2011vtvrÎncă nu există evaluări
- Advanced Asic Chip SynthesisDocument126 paginiAdvanced Asic Chip SynthesispravinÎncă nu există evaluări
- Design and Development of Embedded Multimedia TerminalDocument6 paginiDesign and Development of Embedded Multimedia TerminalseventhsensegroupÎncă nu există evaluări
- Unit 7Document54 paginiUnit 7Pavankumar GorpuniÎncă nu există evaluări
- Low Power Vlsi Design: Assignment-1 G Abhishek Kumar Reddy, M Manoj VarmaDocument17 paginiLow Power Vlsi Design: Assignment-1 G Abhishek Kumar Reddy, M Manoj VarmamanojÎncă nu există evaluări
- FloorPlanning PrinciplesDocument30 paginiFloorPlanning PrinciplesBhavit KaushikÎncă nu există evaluări
- MOSFET Scaling: Dr. Rajan Pandey Associate Professor, SENSEDocument6 paginiMOSFET Scaling: Dr. Rajan Pandey Associate Professor, SENSEVibha M VÎncă nu există evaluări
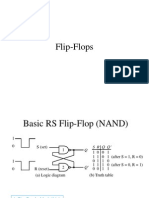
- Flip FlopsDocument25 paginiFlip FlopsNagul MeeraÎncă nu există evaluări
- Asic Design Flow Tutorial 3228glDocument138 paginiAsic Design Flow Tutorial 3228glMahesh Reddy MandapatiÎncă nu există evaluări
- Primetime: Golden Timing Signoff Solution and EnvironmentDocument7 paginiPrimetime: Golden Timing Signoff Solution and Environmentsubrahmanya_rao_1Încă nu există evaluări
- Wipro System On ChipDocument11 paginiWipro System On Chipprodip7Încă nu există evaluări
- Soc Physical Design: Veena S. Chakravarthi Shivananda R. KoteshwarDocument173 paginiSoc Physical Design: Veena S. Chakravarthi Shivananda R. KoteshwarSunil ChettipalliÎncă nu există evaluări
- PD FlowDocument6 paginiPD FlowUTtÎncă nu există evaluări
- SDCrules PDFDocument163 paginiSDCrules PDFarunpandiyanÎncă nu există evaluări
- Development of TSMC 0.25 M Standard Cell LibraryDocument3 paginiDevelopment of TSMC 0.25 M Standard Cell Libraryhex0x1Încă nu există evaluări
- Nvme Pcie SSD M.2 ManualDocument56 paginiNvme Pcie SSD M.2 ManualDummy BearÎncă nu există evaluări
- EE520 ASIC Design PDFDocument44 paginiEE520 ASIC Design PDFthiendoan_bkÎncă nu există evaluări
- 05 TimingDocument7 pagini05 TimingAditya SoniÎncă nu există evaluări
- Chapter 4Document100 paginiChapter 4khgvouy hvogyflÎncă nu există evaluări
- Vlsi Design FlowDocument7 paginiVlsi Design FlowAster RevÎncă nu există evaluări
- Physical DesignDocument12 paginiPhysical DesignPallavi ChÎncă nu există evaluări
- Case Study of Complex Full Chip Low Power Implementation in 16nm NodeDocument32 paginiCase Study of Complex Full Chip Low Power Implementation in 16nm NodemanojkumarÎncă nu există evaluări
- Vlsi Design Test and TestabilityDocument17 paginiVlsi Design Test and TestabilitySuravarapu ArunaÎncă nu există evaluări
- 1.FPGA Design Flow Processes PropertiesDocument5 pagini1.FPGA Design Flow Processes Propertiesmachnik1486624Încă nu există evaluări
- Vlsi Design AutomationDocument31 paginiVlsi Design AutomationNischita KeerthiÎncă nu există evaluări
- Latch-Up Prevention in CMOS Logics - Team VLSIDocument13 paginiLatch-Up Prevention in CMOS Logics - Team VLSIKaifeng LiuÎncă nu există evaluări
- Lecture 3 - Design FlowDocument14 paginiLecture 3 - Design FlowramukajarrÎncă nu există evaluări
- Low Power Vlsi Design1Document23 paginiLow Power Vlsi Design1Shruthi GourishettiÎncă nu există evaluări
- DDRDocument9 paginiDDRnivinÎncă nu există evaluări
- BabaDocument2 paginiBabaakshaypagariyaÎncă nu există evaluări
- 10-Bit C2C DAC Design in 65nm CMOS TechnologyDocument88 pagini10-Bit C2C DAC Design in 65nm CMOS TechnologyRodrigo SantosÎncă nu există evaluări
- Ccs Power Char Guide 081216Document35 paginiCcs Power Char Guide 081216刘振声Încă nu există evaluări
- Commn LabDocument30 paginiCommn Labkldfurio111Încă nu există evaluări
- Syllabus FOR Electronics AND Communication Engineering (Ec)Document3 paginiSyllabus FOR Electronics AND Communication Engineering (Ec)kldfurio111Încă nu există evaluări
- BTech EC Scheme & Syllabus 2012Document75 paginiBTech EC Scheme & Syllabus 2012kldfurio111Încă nu există evaluări
- Reconfigurable Processor ArchitectureDocument35 paginiReconfigurable Processor Architecturekldfurio111Încă nu există evaluări
- Single Level Directory OrganizationDocument8 paginiSingle Level Directory OrganizationarunasekaranÎncă nu există evaluări
- Quadro Mobile Line Card n18 11x8.5 r4 HRDocument1 paginăQuadro Mobile Line Card n18 11x8.5 r4 HREka S. PaongananÎncă nu există evaluări
- 6.6 MAC Address Table AttackDocument4 pagini6.6 MAC Address Table AttackThoriq ThoriqÎncă nu există evaluări
- Niladri - Ganguly New BioDocument3 paginiNiladri - Ganguly New Biohresab_banerjeeÎncă nu există evaluări
- OQLDocument16 paginiOQLVikram KarkiÎncă nu există evaluări
- MATLAB and Simulink: Prof. Dr. Ottmar BeucherDocument71 paginiMATLAB and Simulink: Prof. Dr. Ottmar BeucherShubham ChauhanÎncă nu există evaluări
- Econstruct Issue 2Document40 paginiEconstruct Issue 2ArNushiMahfodzÎncă nu există evaluări
- Free License Keys of Kaspersky Internet Security 2017 Activation Code PDFDocument20 paginiFree License Keys of Kaspersky Internet Security 2017 Activation Code PDFCaesar Catalin Caratasu0% (1)
- Technical SpecificationsDocument9 paginiTechnical SpecificationsVitalii LiakhÎncă nu există evaluări
- Girbau, S.A.: STI-54 / STI-77 Parts ManualDocument72 paginiGirbau, S.A.: STI-54 / STI-77 Parts ManualoozbejÎncă nu există evaluări
- Devops ResumeDocument5 paginiDevops ResumeEkant BajajÎncă nu există evaluări
- Pandapower PDFDocument167 paginiPandapower PDFAlen TatalovićÎncă nu există evaluări
- ATB Business Start-Up GuideDocument19 paginiATB Business Start-Up GuideHilkyahuÎncă nu există evaluări
- Unit 5 - Cyber SecurityDocument9 paginiUnit 5 - Cyber SecurityDraxÎncă nu există evaluări
- Fuerte, Danielle Angela 06-17 Vlog (G) Ing Sino Ka Man, On Vlogs and Created Filipino IdentitiesDocument83 paginiFuerte, Danielle Angela 06-17 Vlog (G) Ing Sino Ka Man, On Vlogs and Created Filipino IdentitiesSherren NalaÎncă nu există evaluări
- 2.+AC Jurnal+GETS V1 N2 ArdiansyahDocument8 pagini2.+AC Jurnal+GETS V1 N2 ArdiansyahSEIN FOXINÎncă nu există evaluări
- Adept PovertyDocument21 paginiAdept PovertyKitchie HermosoÎncă nu există evaluări
- Case Study Problem StatementDocument2 paginiCase Study Problem StatementSahil GargÎncă nu există evaluări
- Digital Overspeed - Protection System: Short DescriptionDocument8 paginiDigital Overspeed - Protection System: Short DescriptionYohannes S AripinÎncă nu există evaluări
- Unit 8 - AWT and Event Handling in JavaDocument60 paginiUnit 8 - AWT and Event Handling in JavaAsmatullah KhanÎncă nu există evaluări
- 24 2 Properties Fourier TrnsformDocument13 pagini24 2 Properties Fourier TrnsformHassan AllawiÎncă nu există evaluări
- Information Literacy - Information Literacy and Performance Task - ProjectDocument25 paginiInformation Literacy - Information Literacy and Performance Task - ProjectBenjie Iguin de JustoÎncă nu există evaluări
- Republic of The Philippines Sangguniang Panlungsod City of Baguio SOFAD SESSION, 09 OCTOBER 2017, 2:00 P.M. Session Nr. 1Document3 paginiRepublic of The Philippines Sangguniang Panlungsod City of Baguio SOFAD SESSION, 09 OCTOBER 2017, 2:00 P.M. Session Nr. 1rainÎncă nu există evaluări
- How To Config and Use WebADIDocument6 paginiHow To Config and Use WebADINguyen HanhÎncă nu există evaluări
- Feature Evaluation For Web Crawler Detection With Data Mining TechniquesDocument11 paginiFeature Evaluation For Web Crawler Detection With Data Mining TechniquesSlava ShkolyarÎncă nu există evaluări
- Annex 4 (Word Format)Document1 paginăAnnex 4 (Word Format)Amores, ArmandoÎncă nu există evaluări
- RS232STATUSMONDocument1 paginăRS232STATUSMONashish.boradÎncă nu există evaluări
- Lisa08 BrochureDocument36 paginiLisa08 BrochuremillajovavichÎncă nu există evaluări