S-ar putea să vă placă și
- AVR Microcontroller: Prepared By: Eng. Ashraf DarwishDocument29 paginiAVR Microcontroller: Prepared By: Eng. Ashraf DarwishHectorLopez100% (2)
- Digital Electronics Circuit: Assignment - 2Document28 paginiDigital Electronics Circuit: Assignment - 2Rubal SharmaÎncă nu există evaluări
- New 8051 MeterialDocument113 paginiNew 8051 Meterialpraneeth saiÎncă nu există evaluări
- Embedded Lab: Kgisl Institute of Technology Department of Electronics and CommunicationDocument111 paginiEmbedded Lab: Kgisl Institute of Technology Department of Electronics and CommunicationJeeva NatarajanÎncă nu există evaluări
- "Keypad and LCD Interfacing Using MicrocontrollerDocument23 pagini"Keypad and LCD Interfacing Using MicrocontrollerKamal PatidarÎncă nu există evaluări
- Armsravan 140618054148 Phpapp01Document132 paginiArmsravan 140618054148 Phpapp01smganorkarÎncă nu există evaluări
- Arm Manual Ver3.2 (Modyfideraj)Document83 paginiArm Manual Ver3.2 (Modyfideraj)Srikanth SriÎncă nu există evaluări
- Control MidDocument310 paginiControl MidRIZER l رايزرÎncă nu există evaluări
- UM1724 User Manual: STM32 Nucleo-64 Boards (MB1136)Document69 paginiUM1724 User Manual: STM32 Nucleo-64 Boards (MB1136)Basti NichtechtdernameÎncă nu există evaluări
- STM32F070CB STM32F070RB STM32F070C6 STM32F070F6Document83 paginiSTM32F070CB STM32F070RB STM32F070C6 STM32F070F6MutiaÎncă nu există evaluări
- Demo Program From Lecture #1: RegistersDocument15 paginiDemo Program From Lecture #1: RegistersNaresh BopparathiÎncă nu există evaluări
- ARM1Document40 paginiARM1Dwaraka OrugantiÎncă nu există evaluări
- Stm32F10Xx8 and Stm32F10Xxb Errata SheetDocument26 paginiStm32F10Xx8 and Stm32F10Xxb Errata SheetHagar2007Încă nu există evaluări
- Unit 2-3Document38 paginiUnit 2-3vidhya sÎncă nu există evaluări
- Ultrasonic Sensor HC-SR04 and Arduino TutorialDocument5 paginiUltrasonic Sensor HC-SR04 and Arduino Tutorialmax100% (2)
- MicrocontrollersDocument34 paginiMicrocontrollersFaridÎncă nu există evaluări
- IAR Workbench SettingsDocument26 paginiIAR Workbench SettingsDavid Moody100% (1)
- Ec6504 MPMC Unit 5Document192 paginiEc6504 MPMC Unit 5Gomathi PsÎncă nu există evaluări
- Course Title: Microprocessor Interfacing TechnologiesDocument22 paginiCourse Title: Microprocessor Interfacing Technologiesaftab_afzal_2Încă nu există evaluări
- LPC11U6XDocument97 paginiLPC11U6XDenes MarschalkoÎncă nu există evaluări
- Avr Tutorial - AvrdudeDocument8 paginiAvr Tutorial - AvrdudeBrian JohnsonÎncă nu există evaluări
- Interfacing The Keyboard To 8051 Micro Controller 11Document10 paginiInterfacing The Keyboard To 8051 Micro Controller 11rajinikanth100% (1)
- MCBSTM32C Lab PDFDocument30 paginiMCBSTM32C Lab PDFguezaki6636Încă nu există evaluări
- The 8051 Microcontroller and Embedded Systems: 8051 Assembly Language ProgrammingDocument297 paginiThe 8051 Microcontroller and Embedded Systems: 8051 Assembly Language ProgrammingShalini BaruahÎncă nu există evaluări
- User Manual LPC2148Document354 paginiUser Manual LPC2148Paramesh Waran0% (1)
- Computer Programming 1st Year 3rd UnitDocument55 paginiComputer Programming 1st Year 3rd Unitsingam setty dhanalakshmiÎncă nu există evaluări
- Hal Manual STMDocument2.232 paginiHal Manual STMDe95BoÎncă nu există evaluări
- Timers & 8051 Timer ProgrammingDocument10 paginiTimers & 8051 Timer ProgrammingrobomindÎncă nu există evaluări
- Embedded Systems With 8051 CDocument190 paginiEmbedded Systems With 8051 CPayal SinghÎncă nu există evaluări
- Thumb InstructionsDocument37 paginiThumb InstructionsBaskar ArumugamÎncă nu există evaluări
- Embedded Lab Manual FinalDocument51 paginiEmbedded Lab Manual FinalFrancis SachinÎncă nu există evaluări
- 2 - ARM Cotex-M3 - IntroductionDocument124 pagini2 - ARM Cotex-M3 - IntroductionNghĩa VũÎncă nu există evaluări
- Procedure: Introduction To SIMULINK AM Modulation and DemodulationDocument15 paginiProcedure: Introduction To SIMULINK AM Modulation and DemodulationypobuleshÎncă nu există evaluări
- Using Winavr - Writing The First Program: Tutorial By: Sohail Alam WWW - Robozaa.Co - CCDocument5 paginiUsing Winavr - Writing The First Program: Tutorial By: Sohail Alam WWW - Robozaa.Co - CCShreyas TaterÎncă nu există evaluări
- Details of Using SIMULINKDocument54 paginiDetails of Using SIMULINKEngr. Omit DebnathÎncă nu există evaluări
- LPC 2148Document62 paginiLPC 2148Karthikeyan JhkÎncă nu există evaluări
- 2 - Arduino Board - Arduino IDE - LED Control - PWMDocument33 pagini2 - Arduino Board - Arduino IDE - LED Control - PWMReda FakihÎncă nu există evaluări
- Lecture 1 Introduction Review of Classical ControlDocument88 paginiLecture 1 Introduction Review of Classical ControlSiraj MohammedÎncă nu există evaluări
- Arduino To Bread BoardDocument6 paginiArduino To Bread BoardADEÎncă nu există evaluări
- WinAVR User ManualDocument25 paginiWinAVR User ManualVishnu PrasadÎncă nu există evaluări
- Ch01 Microcontroller History and FeaturesDocument20 paginiCh01 Microcontroller History and Featuresmaissy dellaÎncă nu există evaluări
- UNIT-3 I/O and Memory Interfacing With 8051Document42 paginiUNIT-3 I/O and Memory Interfacing With 8051krishna100% (1)
- MicrocontrollerDocument53 paginiMicrocontrollerMoumita Bera100% (3)
- 3 TcHxW6S6 k3B8VuouvuA Mod2 Devices QC Whiteoutsremoved Mar 2021Document173 pagini3 TcHxW6S6 k3B8VuouvuA Mod2 Devices QC Whiteoutsremoved Mar 2021Umair Ejaz ButtÎncă nu există evaluări
- Programming Industrial Embedded Systems, 2017./2018.: Laboratory Exercise 1Document69 paginiProgramming Industrial Embedded Systems, 2017./2018.: Laboratory Exercise 1_download_only_Încă nu există evaluări
- MNMM54C923-X REV 1A0 Microcircuit Data Sheet: 20-Key EncoderDocument7 paginiMNMM54C923-X REV 1A0 Microcircuit Data Sheet: 20-Key EncoderkelyÎncă nu există evaluări
- Unit 2 - ARM7 Based MicrocontrollerDocument106 paginiUnit 2 - ARM7 Based MicrocontrollerKunal Khandelwal100% (1)
- Laboratory in Automatic Control: Lab 1 Matlab BasicsDocument23 paginiLaboratory in Automatic Control: Lab 1 Matlab BasicsnchubcclÎncă nu există evaluări
- Lesson 1: The Basics of C++:: Code::Blocks With Mingw G++ Xcode Compatibility IssuesDocument39 paginiLesson 1: The Basics of C++:: Code::Blocks With Mingw G++ Xcode Compatibility IssuesTanveer us zaman100% (1)
- stm32h742 stm32h743 Device Limitations StmicroelectronicsDocument45 paginistm32h742 stm32h743 Device Limitations StmicroelectronicsAndres GonzalezÎncă nu există evaluări
- UntitledDocument79 paginiUntitledNUR SYARIFAH MOHD AZMIÎncă nu există evaluări
- 6th Sem ARMDocument4 pagini6th Sem ARMRaju Sk25% (4)
- Analysis and Design of Combinational Logic CirciutsDocument74 paginiAnalysis and Design of Combinational Logic CirciutsMS RahilÎncă nu există evaluări
- ARM Based Development SyllabusDocument3 paginiARM Based Development SyllabusMANIKANDANÎncă nu există evaluări
- Keil Uvision 3 TutorialDocument12 paginiKeil Uvision 3 Tutorialapi-3697475100% (1)
- Arduino CCDocument14 paginiArduino CCRachana SrinivasÎncă nu există evaluări
- Object Detection Using UltrasonicDocument67 paginiObject Detection Using UltrasonicNimmuÎncă nu există evaluări
- Gesture Controlled Video Playback: Overview of The ProjectDocument4 paginiGesture Controlled Video Playback: Overview of The ProjectMatthew BattleÎncă nu există evaluări
- ATDC Vlsi16 - 17Document1 paginăATDC Vlsi16 - 17Matthew BattleÎncă nu există evaluări
- Check ListDocument1 paginăCheck ListMatthew BattleÎncă nu există evaluări
- Check ListDocument1 paginăCheck ListMatthew BattleÎncă nu există evaluări
- The High Security Smart Helmet Using Internet of Things: AbstractDocument12 paginiThe High Security Smart Helmet Using Internet of Things: AbstractMatthew BattleÎncă nu există evaluări
- Yusong Guo, Zhen Yu and Weimei ZhaoDocument6 paginiYusong Guo, Zhen Yu and Weimei ZhaoMatthew BattleÎncă nu există evaluări
- Internship GuidelinesDocument12 paginiInternship GuidelinesMatthew BattleÎncă nu există evaluări
- Start-Up Sample BPDocument54 paginiStart-Up Sample BPsteven100% (1)
- LNM 1Document42 paginiLNM 1KANHIYA78100% (1)
- Arm3 160303054229Document12 paginiArm3 160303054229Matthew BattleÎncă nu există evaluări
- 3 SRSDocument39 pagini3 SRSRaj MalhotraÎncă nu există evaluări
- Timer Counter in ARM7 (LPC2148) : Aarav SoniDocument26 paginiTimer Counter in ARM7 (LPC2148) : Aarav SoniMatthew BattleÎncă nu există evaluări
- Lecture: Cache Hierarchies: Topics: Cache Innovations (Sections B.1-B.3, 2.1)Document20 paginiLecture: Cache Hierarchies: Topics: Cache Innovations (Sections B.1-B.3, 2.1)Matthew BattleÎncă nu există evaluări
- Arm 170323105622Document13 paginiArm 170323105622Matthew BattleÎncă nu există evaluări
- Srivastav A 2016Document5 paginiSrivastav A 2016Matthew BattleÎncă nu există evaluări
- Arm7 ExamplesDocument16 paginiArm7 ExamplescontrasterÎncă nu există evaluări
- Introduction of Cache MemoryDocument24 paginiIntroduction of Cache MemorygnshkhrÎncă nu există evaluări
- Cache Memory: S. DandamudiDocument56 paginiCache Memory: S. DandamudignshkhrÎncă nu există evaluări
- CU CU: LCD Display LCD DisplayDocument1 paginăCU CU: LCD Display LCD DisplayMatthew BattleÎncă nu există evaluări
- Adc 170207102721Document18 paginiAdc 170207102721Matthew BattleÎncă nu există evaluări
- 10levels PDFDocument20 pagini10levels PDFMatthew BattleÎncă nu există evaluări
- Aw33283286 2Document4 paginiAw33283286 2Matthew BattleÎncă nu există evaluări
- 46 - DesignDocument6 pagini46 - DesignMatthew BattleÎncă nu există evaluări
- 1 Jfets and MesfetsDocument0 pagini1 Jfets and Mesfetsnaveednad2003556Încă nu există evaluări
- Arbiter Waveform Generator For Medical ResearchDocument4 paginiArbiter Waveform Generator For Medical ResearchMatthew BattleÎncă nu există evaluări
- (91267636) Infosysplacement PapersDocument25 pagini(91267636) Infosysplacement Papersprasad_nitcÎncă nu există evaluări
- Arudino WorkshopDocument10 paginiArudino WorkshopMatthew BattleÎncă nu există evaluări
- Cousre DetailDocument2 paginiCousre DetailMatthew BattleÎncă nu există evaluări
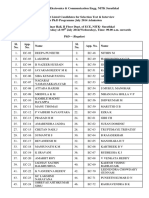
- PHD Applicant ECEDocument3 paginiPHD Applicant ECEMatthew BattleÎncă nu există evaluări