S-ar putea să vă placă și
- Dynamical Systems Method for Solving Nonlinear Operator EquationsDe la EverandDynamical Systems Method for Solving Nonlinear Operator EquationsEvaluare: 5 din 5 stele5/5 (1)
- Engineering Optimization: An Introduction with Metaheuristic ApplicationsDe la EverandEngineering Optimization: An Introduction with Metaheuristic ApplicationsÎncă nu există evaluări
- Optimization Open Method - 3Document6 paginiOptimization Open Method - 3free5050Încă nu există evaluări
- Lecture 7 Interpolation by Direct MethodDocument8 paginiLecture 7 Interpolation by Direct MethodSamuel Mawutor GamorÎncă nu există evaluări
- Systems of Linear EquationsDocument16 paginiSystems of Linear EquationsAntonela MancasÎncă nu există evaluări
- Lecture 10 Numerical Integration TrapezoidalDocument27 paginiLecture 10 Numerical Integration Trapezoidalimranakhtar100% (1)
- Assignment 3 - With Answers - Engineering Statistics - Spring 2020 PDFDocument7 paginiAssignment 3 - With Answers - Engineering Statistics - Spring 2020 PDFKareema BatoolÎncă nu există evaluări
- CE206 Curvefitting Interpolation 4Document20 paginiCE206 Curvefitting Interpolation 4afsanaÎncă nu există evaluări
- A. Mathematics, Surveying & Transportation Engineering MathematicsDocument2 paginiA. Mathematics, Surveying & Transportation Engineering MathematicsErick AbarientosÎncă nu există evaluări
- Solution of Algebric & Transcendental EquationsDocument22 paginiSolution of Algebric & Transcendental EquationsGetsuga TenshouÎncă nu există evaluări
- Trapezoidal RuleDocument10 paginiTrapezoidal RuleRicardo Wan Aguero0% (1)
- Moment of InertiaDocument56 paginiMoment of InertiaAyush 100ni100% (1)
- 5.1. Initial Value Problem - IVPDocument49 pagini5.1. Initial Value Problem - IVPzulkoÎncă nu există evaluări
- Curve Fitting and Interpolation TechniquesDocument41 paginiCurve Fitting and Interpolation TechniquesWinda AsfilasifaÎncă nu există evaluări
- CH 6 Numerical Differentiation and IntegrationDocument21 paginiCH 6 Numerical Differentiation and IntegrationAddisu Safo BoseraÎncă nu există evaluări
- Week10 DifferentiationDocument27 paginiWeek10 DifferentiationasrmltÎncă nu există evaluări
- Solution of Non Linear EquationsDocument29 paginiSolution of Non Linear EquationsRaju SharmaÎncă nu există evaluări
- CH 4 Solution of Systems of Non Linear EquationDocument6 paginiCH 4 Solution of Systems of Non Linear EquationAddisu Safo Bosera0% (1)
- Numerical Methods Ch:Ode Equation and Its Practical ApplicationDocument38 paginiNumerical Methods Ch:Ode Equation and Its Practical ApplicationSupriya RaiÎncă nu există evaluări
- Robot Sensors: An OverviewDocument59 paginiRobot Sensors: An OverviewsafeerkkÎncă nu există evaluări
- MTH510 Numerical Analysis: Text: CH 5 & 6Document6 paginiMTH510 Numerical Analysis: Text: CH 5 & 6Winsle AnÎncă nu există evaluări
- Numerical Solution of Ordinary Differential EquationsDocument31 paginiNumerical Solution of Ordinary Differential Equationschandu3072002100% (1)
- Newton's Divided Difference Interpolation FormulaDocument31 paginiNewton's Divided Difference Interpolation FormulaAnuraj N VÎncă nu există evaluări
- Numerical Methods Paper - 2013Document7 paginiNumerical Methods Paper - 2013Sourav PandaÎncă nu există evaluări
- 10.numerical Double Integration by Simpson's RuleDocument2 pagini10.numerical Double Integration by Simpson's Ruleمحمد إسماعيل100% (1)
- Bisection MethodDocument15 paginiBisection MethodSohar AlkindiÎncă nu există evaluări
- Numerical Solution of Ordinary Differential Equations Part 2 - Nonlinear EquationsDocument38 paginiNumerical Solution of Ordinary Differential Equations Part 2 - Nonlinear EquationsMelih TecerÎncă nu există evaluări
- Chapter 02 (Solution of Algebraic & Transcendental Equation)Document24 paginiChapter 02 (Solution of Algebraic & Transcendental Equation)Imrul Hasan100% (1)
- Basis of Bisection MethodDocument31 paginiBasis of Bisection MethodKristin ArgosinoÎncă nu există evaluări
- Matched Asymptotic Expansion Solution5Document7 paginiMatched Asymptotic Expansion Solution5Michael James Miller100% (1)
- Wk5 - Solution of Algebraic and Transcendental EquationsDocument14 paginiWk5 - Solution of Algebraic and Transcendental EquationsFazelah YakubÎncă nu există evaluări
- Curve FittingDocument28 paginiCurve FittingCillalois Marie FameroÎncă nu există evaluări
- Hussam Ali Mohammed MSCDocument15 paginiHussam Ali Mohammed MSCCivil EngsÎncă nu există evaluări
- Matrices and System of Linear Equations PDFDocument20 paginiMatrices and System of Linear Equations PDFMuhammad IzzuanÎncă nu există evaluări
- Trapezoidal Rule and Simpson's RuleDocument5 paginiTrapezoidal Rule and Simpson's RuleSai VandanaÎncă nu există evaluări
- Sheetal 202890 PPT Integral Equation and Calculus of VariationsDocument13 paginiSheetal 202890 PPT Integral Equation and Calculus of Variations18 princy kaushikÎncă nu există evaluări
- Chapter 3 Numerical Integration: in This Chapter, You Will LearnDocument6 paginiChapter 3 Numerical Integration: in This Chapter, You Will LearnArvin 97Încă nu există evaluări
- Engineering Numerical AnalysisDocument70 paginiEngineering Numerical AnalysisM Zangana100% (1)
- Pole Placement1Document46 paginiPole Placement1masd100% (1)
- Regression and CorrelationDocument4 paginiRegression and CorrelationClark ConstantinoÎncă nu există evaluări
- Radius of CurvatureDocument15 paginiRadius of CurvatureLakshayÎncă nu există evaluări
- Ee132b Hw4 SolDocument11 paginiEe132b Hw4 SolDylan LerÎncă nu există evaluări
- Practice Problems - Set 2Document2 paginiPractice Problems - Set 2ashwinagrawal198231Încă nu există evaluări
- Unit II Fourier SeriesDocument2 paginiUnit II Fourier SeriesilangosssÎncă nu există evaluări
- 2Z03 Final SolDocument24 pagini2Z03 Final SolAbha Hameed100% (1)
- Numerical Solutions of Second Order Boundary Value Problems by Galerkin Residual Method On Using Legendre PolynomialsDocument11 paginiNumerical Solutions of Second Order Boundary Value Problems by Galerkin Residual Method On Using Legendre PolynomialsIOSRjournalÎncă nu există evaluări
- D - Horizontal Alignment and Super ElevationDocument22 paginiD - Horizontal Alignment and Super ElevationAva CastilloÎncă nu există evaluări
- Topic: Coordinate Systems and TransformationDocument33 paginiTopic: Coordinate Systems and TransformationSri DharanÎncă nu există evaluări
- Boundary Value Problems Part 1Document20 paginiBoundary Value Problems Part 1david219125Încă nu există evaluări
- Applications of Numerical MethodsDocument54 paginiApplications of Numerical Methodstarun gehlotÎncă nu există evaluări
- Routh HurwitzDocument14 paginiRouth HurwitzVipul SinghalÎncă nu există evaluări
- Exponential DistributionDocument20 paginiExponential DistributionAhmar NiaziÎncă nu există evaluări
- Chapter 1 - Review Mobile Robot KinematicsDocument23 paginiChapter 1 - Review Mobile Robot KinematicshotrantendatÎncă nu există evaluări
- MA6351 Transforms and Partial Differential Equations 11Document202 paginiMA6351 Transforms and Partial Differential Equations 11Kathirvel MuruganÎncă nu există evaluări
- EMTKnodia PDFDocument765 paginiEMTKnodia PDFbineshÎncă nu există evaluări
- MTHE03C02 - Probability and Statistics Final Exam 2011/2012Document5 paginiMTHE03C02 - Probability and Statistics Final Exam 2011/2012007wasrÎncă nu există evaluări
- Solving Ordinary Differential Equations - Sage Reference Manual v7Document13 paginiSolving Ordinary Differential Equations - Sage Reference Manual v7amyounisÎncă nu există evaluări
- 08.06 Shooting Method For Ordinary Differential EquationsDocument7 pagini08.06 Shooting Method For Ordinary Differential EquationsaroobadilawerÎncă nu există evaluări
- Chapter 2 - Laplace Transform PDFDocument34 paginiChapter 2 - Laplace Transform PDFSritaran BalakrishnanÎncă nu există evaluări
- Part IIDocument42 paginiPart IIAbel TayeÎncă nu există evaluări
- Proposed Meeting Room NameDocument1 paginăProposed Meeting Room NamejuuuunnnnssssÎncă nu există evaluări
- Outlook PM 2016 PDFDocument58 paginiOutlook PM 2016 PDFjuuuunnnnssssÎncă nu există evaluări
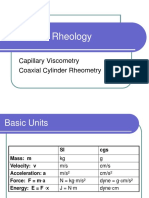
- Rheology Lab ExperimentDocument25 paginiRheology Lab ExperimentjuuuunnnnssssÎncă nu există evaluări
- A Not Than-: Care From Due or orDocument2 paginiA Not Than-: Care From Due or orjuuuunnnnssssÎncă nu există evaluări
- Roundup WG Bula MonsantoDocument16 paginiRoundup WG Bula MonsantodandanyddÎncă nu există evaluări
- Security Enhancement in 2016 SQL ServerDocument21 paginiSecurity Enhancement in 2016 SQL ServerAtul SharmaÎncă nu există evaluări
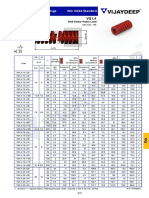
- Rectangular Wire Die Springs ISO-10243 Standard: Red Colour Heavy LoadDocument3 paginiRectangular Wire Die Springs ISO-10243 Standard: Red Colour Heavy LoadbashaÎncă nu există evaluări
- Beijing-Michael PageDocument71 paginiBeijing-Michael Pagejohndavsg8022Încă nu există evaluări
- Lae ReservingDocument5 paginiLae ReservingEsra Gunes YildizÎncă nu există evaluări
- Variable Length Subnet MasksDocument4 paginiVariable Length Subnet MaskszelalemÎncă nu există evaluări
- Gcse Economics 8136/1: Paper 1 - How Markets WorkDocument19 paginiGcse Economics 8136/1: Paper 1 - How Markets WorkkaruneshnÎncă nu există evaluări
- Telemeter-Electronic Brochure Flexible Heaters WebDocument12 paginiTelemeter-Electronic Brochure Flexible Heaters WebXavierÎncă nu există evaluări
- Bar Q Salaries Part 2Document5 paginiBar Q Salaries Part 2Brigette DomingoÎncă nu există evaluări
- High-Definition Multimedia Interface SpecificationDocument51 paginiHigh-Definition Multimedia Interface SpecificationwadrÎncă nu există evaluări
- Importance of Team Work in An OrganizationDocument10 paginiImportance of Team Work in An OrganizationMohammad Sana Ur RabÎncă nu există evaluări
- Impact of Wrongful Termination On EmployeesDocument4 paginiImpact of Wrongful Termination On EmployeesAvil HarshÎncă nu există evaluări
- Genesis and Development of The Network Arch Consept - NYDocument15 paginiGenesis and Development of The Network Arch Consept - NYVu Phi LongÎncă nu există evaluări
- Emancipation Fact SheetDocument2 paginiEmancipation Fact SheetKeelie SmithÎncă nu există evaluări
- Geotechnical Design MannulDocument828 paginiGeotechnical Design MannulJie ZhouÎncă nu există evaluări
- Form DVAT 27A: Intimation of Deposit of Government DuesDocument2 paginiForm DVAT 27A: Intimation of Deposit of Government DueshhhhhhhuuuuuyyuyyyyyÎncă nu există evaluări
- The PILOT: July 2023Document16 paginiThe PILOT: July 2023RSCA Redwood ShoresÎncă nu există evaluări
- International Economics 16Th Edition Thomas Pugel Test Bank Full Chapter PDFDocument45 paginiInternational Economics 16Th Edition Thomas Pugel Test Bank Full Chapter PDFRebeccaBartlettqfam100% (11)
- Di MCB DB Pricelist01!07!2018Document1 paginăDi MCB DB Pricelist01!07!2018saurabhjerps231221Încă nu există evaluări
- 11 - Savulescu Et Al (2020) - Equality or Utility. Ethics and Law of Rationing VentilatorsDocument6 pagini11 - Savulescu Et Al (2020) - Equality or Utility. Ethics and Law of Rationing VentilatorsCorrado BisottoÎncă nu există evaluări
- Zone Controller: Th-LargeDocument1 paginăZone Controller: Th-LargeIsmat AraÎncă nu există evaluări
- Revised Estimate Draft 24-12-2021Document100 paginiRevised Estimate Draft 24-12-2021Reenu CherianÎncă nu există evaluări
- Malinta - Malolos Via Mcarthur Hi-Way: Jeep Bus Time Schedule & Line MapDocument6 paginiMalinta - Malolos Via Mcarthur Hi-Way: Jeep Bus Time Schedule & Line MapMitchie CimorelliÎncă nu există evaluări
- Piccadilly Circus BusDocument1 paginăPiccadilly Circus Busmeylota2Încă nu există evaluări
- 3a. Systems Approach To PoliticsDocument12 pagini3a. Systems Approach To PoliticsOnindya MitraÎncă nu există evaluări
- Data Loss PreventionDocument20 paginiData Loss Preventiondeepak4315Încă nu există evaluări
- Aermod - DRM - Course NotesDocument25 paginiAermod - DRM - Course NotesGhulamMustafaÎncă nu există evaluări
- LOVDocument43 paginiLOVMei FadillahÎncă nu există evaluări
- Raspberry Pi Installing Noobs OSDocument3 paginiRaspberry Pi Installing Noobs OSEXORCEÎncă nu există evaluări
- CS 148 - Introduction To Computer Graphics and ImagingDocument3 paginiCS 148 - Introduction To Computer Graphics and ImagingMurtaza TajÎncă nu există evaluări