S-ar putea să vă placă și
- Chapter No. 01: Magnetic CircuitsDocument53 paginiChapter No. 01: Magnetic CircuitsUmar SheikhÎncă nu există evaluări
- Chapter 1 - Magnetic CircuitsDocument35 paginiChapter 1 - Magnetic CircuitsJasmine MaisaraÎncă nu există evaluări
- Modelling of Mechanical System IIIDocument13 paginiModelling of Mechanical System IIIडॉ. इन्द्रसेन सिंहÎncă nu există evaluări
- Magnetism and Magnetic CircuitsDocument30 paginiMagnetism and Magnetic CircuitsSyabani HarisÎncă nu există evaluări
- Power Distribution Systems and Its CharacteristicsDocument50 paginiPower Distribution Systems and Its CharacteristicsquangspktÎncă nu există evaluări
- Cir2 Lect 5 Magnetically Coupled Circuits UpdatedDocument22 paginiCir2 Lect 5 Magnetically Coupled Circuits Updatedsuresh270Încă nu există evaluări
- Basic Electronics NotesDocument70 paginiBasic Electronics NotesZiying FangÎncă nu există evaluări
- Ohm S Law TutorialDocument17 paginiOhm S Law Tutorialchristopher pazmiño panchanaÎncă nu există evaluări
- Pressure MeasurementDocument24 paginiPressure MeasurementOssy DewintaÎncă nu există evaluări
- Lecture 1 Introduction To Power Distribution SystemsDocument53 paginiLecture 1 Introduction To Power Distribution SystemsMohammed ShifulÎncă nu există evaluări
- Chapter 1 - Force and Field PDFDocument35 paginiChapter 1 - Force and Field PDFYuriÎncă nu există evaluări
- Module 1 - DESHIDocument93 paginiModule 1 - DESHIRaghupatiÎncă nu există evaluări
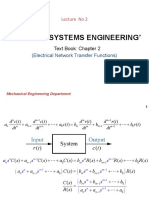
- Lecture 02 Electrical Networks Transfer FunctionDocument18 paginiLecture 02 Electrical Networks Transfer FunctionRammay SbÎncă nu există evaluări
- Topic 3 Electric Field & Electric ChargeDocument73 paginiTopic 3 Electric Field & Electric ChargesarahÎncă nu există evaluări
- Notes DualDocument13 paginiNotes DualAdarsh DhawanÎncă nu există evaluări
- Gaya Coulomb IIDocument126 paginiGaya Coulomb IIElang TimurÎncă nu există evaluări
- Chapter 29 - Nuclear PhysicsDocument40 paginiChapter 29 - Nuclear PhysicsHazzim AriffÎncă nu există evaluări
- Electric FieldDocument5 paginiElectric FieldAdarsh RajÎncă nu există evaluări
- BEE Module 1Document17 paginiBEE Module 1John crax100% (1)
- Earthing Protection BKM 7103Document8 paginiEarthing Protection BKM 7103Utku Can KılıçÎncă nu există evaluări
- Engineering Physics 2 Unit-3Document82 paginiEngineering Physics 2 Unit-3Sriram JÎncă nu există evaluări
- DielectricsDocument47 paginiDielectricsVaishnavi BhadrashetteÎncă nu există evaluări
- Difference Between Bonding, Grounding and EarthingDocument3 paginiDifference Between Bonding, Grounding and EarthingJignesh ParmarÎncă nu există evaluări
- Chapter Two: Mathematical Modeling of Physical SystemsDocument29 paginiChapter Two: Mathematical Modeling of Physical SystemsWabe KemalÎncă nu există evaluări
- Basic Electrical Engineering (BEEE101L) : Presented byDocument23 paginiBasic Electrical Engineering (BEEE101L) : Presented byAsh wanth100% (1)
- Chapter 8 PPT - Maxwell.importantDocument15 paginiChapter 8 PPT - Maxwell.importantOsama Hassan100% (1)
- Ohm's LawDocument15 paginiOhm's Lawpaancute8982Încă nu există evaluări
- Lecture 2 (Communication Channel)Document23 paginiLecture 2 (Communication Channel)baginno20014262Încă nu există evaluări
- Circuit LabDocument46 paginiCircuit LabMiran SolankiÎncă nu există evaluări
- Dokumen - Tips - Electronic Devices 9th Edition by Floyd Pp1aDocument31 paginiDokumen - Tips - Electronic Devices 9th Edition by Floyd Pp1aAmr AbdelnaserÎncă nu există evaluări
- RFID ModulationDocument19 paginiRFID Modulationmonster9xÎncă nu există evaluări
- Lab 4 - Clippper and Clamper CircuitsDocument7 paginiLab 4 - Clippper and Clamper CircuitseyobÎncă nu există evaluări
- Ex8Serie1 - Gamow's Theory of Alpha Decay (1) - 1 MileDocument6 paginiEx8Serie1 - Gamow's Theory of Alpha Decay (1) - 1 Milekrlekrle123Încă nu există evaluări
- Electric Field AND GAUSS LAWDocument15 paginiElectric Field AND GAUSS LAWLexis Music labÎncă nu există evaluări
- 01 P-N Junction DiodeDocument5 pagini01 P-N Junction DiodeRomeshÎncă nu există evaluări
- What Is A MOSFET - Basics, Working Principle & ApplicationsDocument3 paginiWhat Is A MOSFET - Basics, Working Principle & ApplicationsKimberly Camacho CatubigÎncă nu există evaluări
- Semiconductor PhysicsDocument42 paginiSemiconductor PhysicsDebajyoti DattaÎncă nu există evaluări
- Chapter 2-Transformers PDFDocument103 paginiChapter 2-Transformers PDFkessam92100% (1)
- Plasma ConfinementDocument3 paginiPlasma ConfinementSunny KumarÎncă nu există evaluări
- 4 Magnetic Field Due To A Current-Carrying Wire, Biot-Savart Law APCDocument24 pagini4 Magnetic Field Due To A Current-Carrying Wire, Biot-Savart Law APCSayyad DawarÎncă nu există evaluări
- Chapter 1-Semiconductor MaterialsDocument62 paginiChapter 1-Semiconductor MaterialsMd Masudur Rahman Abir100% (1)
- Electric Circuit Analysis - 1: Lab Report 4Document11 paginiElectric Circuit Analysis - 1: Lab Report 4Bilal KhanÎncă nu există evaluări
- Final Exam Questions #7 - EMWDocument3 paginiFinal Exam Questions #7 - EMWanonslu2012Încă nu există evaluări
- Electrical Machines - Unit IIDocument70 paginiElectrical Machines - Unit IIPrakash ArumugamÎncă nu există evaluări
- Electrical SafetyDocument47 paginiElectrical SafetyNo Hope100% (1)
- Ee Electron Theory, Quantum Free Electron Theory & Band Width TheoryDocument4 paginiEe Electron Theory, Quantum Free Electron Theory & Band Width TheoryAshutosh SinghÎncă nu există evaluări
- Special Purpose DiodesDocument43 paginiSpecial Purpose DiodesllovresÎncă nu există evaluări
- By: Jasper B. DeromaDocument26 paginiBy: Jasper B. DeromaRaging Potato100% (1)
- Basics of Power SystemsDocument63 paginiBasics of Power SystemsAravind BalaÎncă nu există evaluări
- Chapter 1Document32 paginiChapter 1Mekonnen AyalÎncă nu există evaluări
- Emf Report PDFDocument148 paginiEmf Report PDFUgyenKpÎncă nu există evaluări
- ElectrostaticsDocument12 paginiElectrostaticsDarel WilliamsÎncă nu există evaluări
- Nano SuperconductivityDocument26 paginiNano Superconductivity2018 01403Încă nu există evaluări
- Lab 2Document32 paginiLab 2AyeshaÎncă nu există evaluări
- Chapter 3Document10 paginiChapter 3aregawi weleabezgiÎncă nu există evaluări
- Chapter 17 Electric Fields PDFDocument43 paginiChapter 17 Electric Fields PDFPathmanathan NadesonÎncă nu există evaluări
- Chapter OneDocument15 paginiChapter OneBirukÎncă nu există evaluări
- Notes PPT UNIT-2Document21 paginiNotes PPT UNIT-2ajha88475Încă nu există evaluări
- Ac/Dc Machinery Chapter Compilation: John Alfred A. Ceniza BSME-5Document42 paginiAc/Dc Machinery Chapter Compilation: John Alfred A. Ceniza BSME-5John A. CenizaÎncă nu există evaluări
- Group 1 1.3Document27 paginiGroup 1 1.3Krista Joy PetalioÎncă nu există evaluări
- Elevations: Design TeamDocument1 paginăElevations: Design Teamsandesh sagar TripathiÎncă nu există evaluări
- Wall DensityDocument1 paginăWall Densitysandesh sagar TripathiÎncă nu există evaluări
- Drip LiteratureDocument15 paginiDrip Literaturesandesh sagar TripathiÎncă nu există evaluări
- 06 Managerial Implications For Integrating Customers Into Industrial Product InnovationDocument33 pagini06 Managerial Implications For Integrating Customers Into Industrial Product Innovationsandesh sagar TripathiÎncă nu există evaluări
- βA texDocument1 paginăβA texsandesh sagar TripathiÎncă nu există evaluări
- Basic Ac DrivesDocument49 paginiBasic Ac DrivesDev SwainÎncă nu există evaluări
- Science 10 (Unit 2)Document147 paginiScience 10 (Unit 2)Yanna Pahuyo74% (35)
- Combined Geo-Scientist (P) Examination 2020 Paper-IDocument21 paginiCombined Geo-Scientist (P) Examination 2020 Paper-Isumit chakrabortyÎncă nu există evaluări
- Todd J. Desiato and Riccardo C. Storti - Warp Drive Propulsion Within Maxwell's EquationsDocument16 paginiTodd J. Desiato and Riccardo C. Storti - Warp Drive Propulsion Within Maxwell's EquationsHerftezÎncă nu există evaluări
- Chapter 2: MagnetostaticsDocument43 paginiChapter 2: MagnetostaticsSnehashis KoleyÎncă nu există evaluări
- 2.4.1 Using Electromagnets: Name: - Class: - DateDocument10 pagini2.4.1 Using Electromagnets: Name: - Class: - DateAyesha HussainÎncă nu există evaluări
- SR Elite, Aiims S60, Neet MPL & Medicon Aiims Grand Test - 8 Paper - 04-02-19Document20 paginiSR Elite, Aiims S60, Neet MPL & Medicon Aiims Grand Test - 8 Paper - 04-02-19Ayan GhoshÎncă nu există evaluări
- Tutorial 4 QuestionDocument5 paginiTutorial 4 QuestionVikneswaran RajanÎncă nu există evaluări
- STE - Week 3Document69 paginiSTE - Week 3Anonymous xf4o0AtOTFÎncă nu există evaluări
- GENERAL PHYSICS 2 - Q4 - Week 2Document17 paginiGENERAL PHYSICS 2 - Q4 - Week 2Niño John ArtesÎncă nu există evaluări
- Eddy CurrentDocument71 paginiEddy CurrentMaroknightÎncă nu există evaluări
- IFC Q & A 2 - ElectronicsDocument6 paginiIFC Q & A 2 - ElectronicsJohn Paul M. TubigÎncă nu există evaluări
- S6 Magnetism and ElectromagnetismDocument42 paginiS6 Magnetism and ElectromagnetismMichelle LoÎncă nu există evaluări
- Curriculum For B. Tech. (Electrical Engineering) of School of Electrical SciencesDocument33 paginiCurriculum For B. Tech. (Electrical Engineering) of School of Electrical SciencesaanbalanÎncă nu există evaluări
- 2014-2015, 2015-2016 物理入學考試試題 及 參考答案Document17 pagini2014-2015, 2015-2016 物理入學考試試題 及 參考答案yuÎncă nu există evaluări
- Dual Reversible Transformer Model For The Calculation of Low-Frequency TransientsDocument9 paginiDual Reversible Transformer Model For The Calculation of Low-Frequency Transientsval111Încă nu există evaluări
- CBSE Previous Year Question Papers Class 12 Physics Bhubaneswar Set 3 2015Document24 paginiCBSE Previous Year Question Papers Class 12 Physics Bhubaneswar Set 3 2015ashok pradhanÎncă nu există evaluări
- What Is The Electron SpinDocument92 paginiWhat Is The Electron SpinTomás Andres Veliz Campos100% (1)
- Physics: Syllabus For Higher Secondary Final Year CourseDocument5 paginiPhysics: Syllabus For Higher Secondary Final Year CourseSignor Plaban GogoiÎncă nu există evaluări
- 20150227080251Chp 4 MagnetismDocument30 pagini20150227080251Chp 4 Magnetismbatraz79Încă nu există evaluări
- PEP 2021 Phase 1 Selection Test 2 - SolutionDocument8 paginiPEP 2021 Phase 1 Selection Test 2 - SolutionMarcus PoonÎncă nu există evaluări
- Ashutosh Pramanik - Electromagnetism - Theory and Applications PDFDocument1.015 paginiAshutosh Pramanik - Electromagnetism - Theory and Applications PDFwalandev89100% (2)
- The Expanding Role of PM Machines in Direct-DriveDocument6 paginiThe Expanding Role of PM Machines in Direct-Driverakeshee2007Încă nu există evaluări
- El 4651 V3Document158 paginiEl 4651 V3rogeriojuruaiaÎncă nu există evaluări
- Vector Calculus Primer Crash CourseDocument136 paginiVector Calculus Primer Crash CourseArijit SharmaÎncă nu există evaluări
- Solusi Modul Tutorial 7 FDocument4 paginiSolusi Modul Tutorial 7 FHazelnut ChocoÎncă nu există evaluări
- # 1. Neet 2017 - Physics - Chapter 18 Magnetism and MatterDocument32 pagini# 1. Neet 2017 - Physics - Chapter 18 Magnetism and MatterTamilaruviÎncă nu există evaluări
- Maxwell's Equations of Electrodynamics An Explanation (2012)Document106 paginiMaxwell's Equations of Electrodynamics An Explanation (2012)Nemish Prakash100% (3)
- Revised Electromagnetic Theory (For ECE)Document51 paginiRevised Electromagnetic Theory (For ECE)rishabh mishraÎncă nu există evaluări
- Parker Electronics Update 160316 PDFDocument71 paginiParker Electronics Update 160316 PDFMaria Lavinia IordacheÎncă nu există evaluări