S-ar putea să vă placă și
- Structural Steel Design 2Document28 paginiStructural Steel Design 2Chamil MahagamageÎncă nu există evaluări
- Engg. Materials - Unit - 1Document13 paginiEngg. Materials - Unit - 1Satish SahuÎncă nu există evaluări
- A Comparison of Fatigue Strength Sensitivity To Defects - 2017 - International JDocument14 paginiA Comparison of Fatigue Strength Sensitivity To Defects - 2017 - International JLucas CaraffiniÎncă nu există evaluări
- 12-Tafmec 2021Document10 pagini12-Tafmec 2021Liviu MarsavinaÎncă nu există evaluări
- Evaluation of J-Integral of A Standard Cracked Specimen Using Fem ApproachDocument6 paginiEvaluation of J-Integral of A Standard Cracked Specimen Using Fem ApproachSTARLIN PRINCEÎncă nu există evaluări
- CPD On FEM in Structural Engineering To UDocument38 paginiCPD On FEM in Structural Engineering To UChamil MahagamageÎncă nu există evaluări
- Bab 02 Analisa Karakteristik Bahan PBP PDFDocument64 paginiBab 02 Analisa Karakteristik Bahan PBP PDFSeptianBuyungBudiUtomoÎncă nu există evaluări
- Progressive Failure Under High-Velocity Impact On Composite LaminatesDocument16 paginiProgressive Failure Under High-Velocity Impact On Composite LaminatesHARSHIT MAITHILÎncă nu există evaluări
- Teste de Upload 5Document7 paginiTeste de Upload 5Vilson Dalla Jr.Încă nu există evaluări
- Lecture 4_ Unit 4 Mechanical Properties & Failure - 2022 - CopyDocument55 paginiLecture 4_ Unit 4 Mechanical Properties & Failure - 2022 - CopyJohannah ManokoÎncă nu există evaluări
- Materials in Mechanical Design: ME-311 Fundamentals of Machine DesignDocument71 paginiMaterials in Mechanical Design: ME-311 Fundamentals of Machine Designbanno fakeÎncă nu există evaluări
- Tensile & Impact Strength Information of Fiber Metal LaminateDocument32 paginiTensile & Impact Strength Information of Fiber Metal LaminateSeeandgrow ByabdulsamadÎncă nu există evaluări
- Structural Steel Design 3Document28 paginiStructural Steel Design 3Chamil MahagamageÎncă nu există evaluări
- The Effect of Coating Thickness On Fatigue Properties of Steel Thermally Sprayed With Ni-Based Self-Fluxing AlloyDocument2 paginiThe Effect of Coating Thickness On Fatigue Properties of Steel Thermally Sprayed With Ni-Based Self-Fluxing AlloyS.Mohana sundaramÎncă nu există evaluări
- Numerical Simulation of Dynamic Large Deformation and Fractur - 2020 - Defence TDocument6 paginiNumerical Simulation of Dynamic Large Deformation and Fractur - 2020 - Defence Tmatbaila247Încă nu există evaluări
- Notch Defect Interaction in Additively Manufact 2019 International Journal oDocument11 paginiNotch Defect Interaction in Additively Manufact 2019 International Journal oMUIN ABDULLAH-ALÎncă nu există evaluări
- Composite Materials For Wind Turbine BladesDocument105 paginiComposite Materials For Wind Turbine Bladesquique100% (1)
- Finite Element Analysis of The Thermomechanical Behavior of Metal Matrix Composites (MMC)Document16 paginiFinite Element Analysis of The Thermomechanical Behavior of Metal Matrix Composites (MMC)bouakkazaÎncă nu există evaluări
- Damage Characterization of Laminated Composites Using Acoustic Emission - A ReviewDocument21 paginiDamage Characterization of Laminated Composites Using Acoustic Emission - A Review윤대성Încă nu există evaluări
- Irjet V9i2194Document7 paginiIrjet V9i2194Abhijeet SableÎncă nu există evaluări
- Seismic Design To EC8 - L4Document37 paginiSeismic Design To EC8 - L4Chamil MahagamageÎncă nu există evaluări
- IMECE2004-59151: Stress Concentration in Laminated Composites With An Elliptical Hole Under Uniaxial LoadDocument6 paginiIMECE2004-59151: Stress Concentration in Laminated Composites With An Elliptical Hole Under Uniaxial LoadSajjid Hasan Asif PanthoÎncă nu există evaluări
- Week 8 SolidDocument23 paginiWeek 8 SolidMohaiminul Islam TalhaÎncă nu există evaluări
- TALAT Lecture 4702: Factors Influencing The Strength of Adhesive JointsDocument13 paginiTALAT Lecture 4702: Factors Influencing The Strength of Adhesive JointsCORE MaterialsÎncă nu există evaluări
- Teste de Upload 4Document10 paginiTeste de Upload 4Vilson Dalla Jr.Încă nu există evaluări
- (Francisco Ramírez) TOM+Impacto SIIA2020Document41 pagini(Francisco Ramírez) TOM+Impacto SIIA2020Francisco RamirezÎncă nu există evaluări
- Materials and Design: H.E. Coules, G.C.M. Horne, K. Abburi Venkata, T. PirlingDocument10 paginiMaterials and Design: H.E. Coules, G.C.M. Horne, K. Abburi Venkata, T. Pirling_Asylum_Încă nu există evaluări
- The Effect of Low Velocity Impact On The Flexural Strength of E-GLASS EPOXY Composite PlatesDocument8 paginiThe Effect of Low Velocity Impact On The Flexural Strength of E-GLASS EPOXY Composite Platesjunjie yiÎncă nu există evaluări
- Comparison of Ballistic Impact Behavior of Carbon Fiber/Epoxy Composite and Steel Metal StructuresDocument10 paginiComparison of Ballistic Impact Behavior of Carbon Fiber/Epoxy Composite and Steel Metal StructuresVeeturiVarunÎncă nu există evaluări
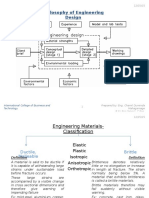
- Philosophy of Engineering Design: International College of Business and TechnologyDocument51 paginiPhilosophy of Engineering Design: International College of Business and TechnologycdmcgcÎncă nu există evaluări
- 1111fracture ToughnessDocument4 pagini1111fracture ToughnessPei-YuChenÎncă nu există evaluări
- ME-311 - Materials in Design - 3Document57 paginiME-311 - Materials in Design - 3Nakshatra Patil 4-Year B.Tech. Mechanical EngineeringÎncă nu există evaluări
- Harish Kumar, Dr. S. V. SatishDocument3 paginiHarish Kumar, Dr. S. V. SatishHager RÎncă nu există evaluări
- Santos2020 PDFDocument11 paginiSantos2020 PDFHemant ChouhanÎncă nu există evaluări
- Review Papers Fatigue Behavior of Fiber-Reinforced Polymer Composites-A ReviewDocument8 paginiReview Papers Fatigue Behavior of Fiber-Reinforced Polymer Composites-A ReviewNeelkant PatilÎncă nu există evaluări
- 2012 Internal Damage Investigation of Reinforced Composite Using MicroCT - Fidan ( MCT)Document7 pagini2012 Internal Damage Investigation of Reinforced Composite Using MicroCT - Fidan ( MCT)rhinemineÎncă nu există evaluări
- 01 Mechanical Properties of Materials Jan09 StdNotesDocument34 pagini01 Mechanical Properties of Materials Jan09 StdNotesRusYz AvVeroezÎncă nu există evaluări
- Engineering Fracture Mechanics: SciencedirectDocument15 paginiEngineering Fracture Mechanics: SciencedirectMahesh BharatiÎncă nu există evaluări
- P3MI Presentation - KK ITM - RR - AW - FS-HJ - v3-0Document7 paginiP3MI Presentation - KK ITM - RR - AW - FS-HJ - v3-0Febri RamdaniÎncă nu există evaluări
- TESTING_OF_COMPOSITE_ON_DROP-WEIGHT_IMPADocument12 paginiTESTING_OF_COMPOSITE_ON_DROP-WEIGHT_IMPAaeromac33Încă nu există evaluări
- Chapter 01 IntroductionDocument36 paginiChapter 01 IntroductionMario WÎncă nu există evaluări
- Finite Element Modeling of RC Beams Strengthened in Flexure Using FRP MaterialDocument12 paginiFinite Element Modeling of RC Beams Strengthened in Flexure Using FRP MaterialCu ToànÎncă nu există evaluări
- Material Science NotesDocument6 paginiMaterial Science Notessandarasolis11Încă nu există evaluări
- Influence of FDM Process Parameters on ABS Viscoelastic PropertiesDocument6 paginiInfluence of FDM Process Parameters on ABS Viscoelastic PropertiesLeyton DanyÎncă nu există evaluări
- Comparative Analysis of Frontal Car Bumper During Impact: Bhavesh A. BohraDocument9 paginiComparative Analysis of Frontal Car Bumper During Impact: Bhavesh A. BohraarthurÎncă nu există evaluări
- E Glass JuteDocument12 paginiE Glass JutevinothkumarÎncă nu există evaluări
- Low-velocity impact response of laminated composite platesDocument9 paginiLow-velocity impact response of laminated composite platesShivdayal PatelÎncă nu există evaluări
- Effects of Particle Size, Particle/matrix Interface Adhesion and Particle Loading On Mechanical Properties of Particulate-Polymer CompositesDocument29 paginiEffects of Particle Size, Particle/matrix Interface Adhesion and Particle Loading On Mechanical Properties of Particulate-Polymer CompositesBesMaÎncă nu există evaluări
- Chapter 2 - Failure Mechanics 1Document42 paginiChapter 2 - Failure Mechanics 1Kise RyotaÎncă nu există evaluări
- 2 Ajide Et Al 2022 - IJIDem - SpringerDocument7 pagini2 Ajide Et Al 2022 - IJIDem - Springerbaloshereefdeen003Încă nu există evaluări
- Aluminium Honeycomb Sandwich Collapse ModesDocument10 paginiAluminium Honeycomb Sandwich Collapse ModesSURESHÎncă nu există evaluări
- لحام ستانلس ودوبلكسDocument22 paginiلحام ستانلس ودوبلكسNadine YazbekÎncă nu există evaluări
- Effects of Aluminum Surface Treatments oDocument13 paginiEffects of Aluminum Surface Treatments oRaul VelascoÎncă nu există evaluări
- GEOSYNTHETIC PROPERTIES AND TEST METHODSDocument42 paginiGEOSYNTHETIC PROPERTIES AND TEST METHODSalfredomotaÎncă nu există evaluări
- 03 Material Selection in EngineeringDocument21 pagini03 Material Selection in EngineeringAndu WSÎncă nu există evaluări
- Research 1Document10 paginiResearch 1shahadÎncă nu există evaluări
- Theoretical and Applied Fracture MechanicsDocument14 paginiTheoretical and Applied Fracture MechanicsMahmood KhanÎncă nu există evaluări
- Materials Selection in Design GuideDocument40 paginiMaterials Selection in Design GuideAndres CarmonaÎncă nu există evaluări
- Three PointDocument9 paginiThree Pointdinesh ramratanÎncă nu există evaluări
- Stresses and Failure CriteriaDocument74 paginiStresses and Failure CriteriaChamil Mahagamage100% (1)
- Design of Offshore Junction ChamberDocument53 paginiDesign of Offshore Junction ChamberChamil MahagamageÎncă nu există evaluări
- Design of Reinforced Concrete Structures to EurocodesDocument28 paginiDesign of Reinforced Concrete Structures to EurocodesChamil Mahagamage100% (1)
- Design of Canal Lining SystemDocument23 paginiDesign of Canal Lining SystemChamil Mahagamage100% (1)
- 1415 CE7112 Plastic Analysis 2Document22 pagini1415 CE7112 Plastic Analysis 2Chamil MahagamageÎncă nu există evaluări
- CPD On FEM in Structural Engineering To UDocument38 paginiCPD On FEM in Structural Engineering To UChamil MahagamageÎncă nu există evaluări
- Advanced Structural Design - Lecture Note 09 P2Document21 paginiAdvanced Structural Design - Lecture Note 09 P2Chamil Mahagamage100% (1)
- CPD On FEM in Structural Engineering To UDocument38 paginiCPD On FEM in Structural Engineering To UChamil MahagamageÎncă nu există evaluări
- Structural Design - Pre Stressed ConcreteDocument43 paginiStructural Design - Pre Stressed ConcreteChamil MahagamageÎncă nu există evaluări
- Plastic Analysis 1Document23 paginiPlastic Analysis 1Chamil MahagamageÎncă nu există evaluări
- Two DOF SystemsDocument67 paginiTwo DOF SystemsSrinath Gudur100% (1)
- Seismic ConceptualDocument82 paginiSeismic Conceptualஆனந்த் கிருஷ்ணன்Încă nu există evaluări
- Response Spectrum Analysis PDFDocument30 paginiResponse Spectrum Analysis PDFSujay SantraÎncă nu există evaluări
- Advanced Structural Design - Lecture Note 11Document51 paginiAdvanced Structural Design - Lecture Note 11Chamil Mahagamage100% (1)
- Structural Engineering Design - Lecture NotesDocument68 paginiStructural Engineering Design - Lecture NotesChamil MahagamageÎncă nu există evaluări
- Seismic Design To EC8 - L4Document37 paginiSeismic Design To EC8 - L4Chamil MahagamageÎncă nu există evaluări
- Seismic Design To EC8 - L3Document18 paginiSeismic Design To EC8 - L3Chamil MahagamageÎncă nu există evaluări
- Structural Design - Post Tensioned Slab Design1Document12 paginiStructural Design - Post Tensioned Slab Design1Chamil MahagamageÎncă nu există evaluări
- Advanced Structural Design - Lecture Note 11Document51 paginiAdvanced Structural Design - Lecture Note 11Chamil Mahagamage100% (1)
- Structural Steel Design 1Document22 paginiStructural Steel Design 1Chamil MahagamageÎncă nu există evaluări
- Advanced Structural Design - Slab DesignDocument22 paginiAdvanced Structural Design - Slab DesignChamil MahagamageÎncă nu există evaluări
- Structural Steel Design 3Document28 paginiStructural Steel Design 3Chamil MahagamageÎncă nu există evaluări
- Philosophy of Engineering Design: International College of Business and TechnologyDocument51 paginiPhilosophy of Engineering Design: International College of Business and TechnologyChamil MahagamageÎncă nu există evaluări
- Structural Steel Design 3Document28 paginiStructural Steel Design 3Chamil MahagamageÎncă nu există evaluări
- Structural Design - Pre Stressed ConcreteDocument43 paginiStructural Design - Pre Stressed ConcreteChamil MahagamageÎncă nu există evaluări
- Structural Steel Design 1Document22 paginiStructural Steel Design 1Chamil MahagamageÎncă nu există evaluări
- Seismic Design To EC8 - L4Document37 paginiSeismic Design To EC8 - L4Chamil MahagamageÎncă nu există evaluări
- STM WDocument18 paginiSTM WEdgardo GambandeÎncă nu există evaluări
- Technical Report: Design of Metal Anchors For Use in Concrete Under Seismic ActionsDocument16 paginiTechnical Report: Design of Metal Anchors For Use in Concrete Under Seismic ActionsJulioGoesÎncă nu există evaluări
- Instr 12107 Instrument Drawings and DocumentsDocument37 paginiInstr 12107 Instrument Drawings and DocumentsMeliana Butar-Butar100% (2)
- Erection Manual - Tank Stand (Galv Steel) PDFDocument8 paginiErection Manual - Tank Stand (Galv Steel) PDFhuyenthaigia100% (1)
- 'Westerbeke: Parts ListDocument106 pagini'Westerbeke: Parts ListasdrubalaraujoÎncă nu există evaluări
- SSC JE Mains Test Series ProblemsDocument6 paginiSSC JE Mains Test Series ProblemsAble KuriakoseÎncă nu există evaluări
- 2016 3 1 4 ClucasDocument18 pagini2016 3 1 4 ClucasAhmed S. El DenÎncă nu există evaluări
- Hand Operated Can CrusherDocument60 paginiHand Operated Can CrusherParen Trivedi100% (2)
- Practice Problems - Breath Section PDFDocument68 paginiPractice Problems - Breath Section PDFnickÎncă nu există evaluări
- Me6302 - Manufacturing Technology - I: Iii Semester Mechanical EngineeringDocument69 paginiMe6302 - Manufacturing Technology - I: Iii Semester Mechanical EngineeringamdevaÎncă nu există evaluări
- CAMON C8 Rotavator PowerSafe DiagramDocument16 paginiCAMON C8 Rotavator PowerSafe DiagramDomÎncă nu există evaluări
- 2023 08 13T123254.637Document10 pagini2023 08 13T123254.637Mahdi abanÎncă nu există evaluări
- Tut3 - Bending Moment and Shear Force Diagrams - MemoDocument12 paginiTut3 - Bending Moment and Shear Force Diagrams - MemoDazzle Njabs MbungeleÎncă nu există evaluări
- Department of Aerospace Engineering: Chapter-1 Review of Basic Definitions & EquationsDocument53 paginiDepartment of Aerospace Engineering: Chapter-1 Review of Basic Definitions & EquationsJASHANPREET SINGHÎncă nu există evaluări
- Ducato 290 Handbook 05-15 PDFDocument387 paginiDucato 290 Handbook 05-15 PDFDaniÎncă nu există evaluări
- Don3.0 Software - Proper Assembly of Flange JointDocument3 paginiDon3.0 Software - Proper Assembly of Flange JointJoshua HobsonÎncă nu există evaluări
- Finite Element Analysis of Unreinforced Masonry Walls: MahammedDocument14 paginiFinite Element Analysis of Unreinforced Masonry Walls: MahammedSaad HneidiÎncă nu există evaluări
- WinPet BrochureDocument2 paginiWinPet BrochureTamil KumarÎncă nu există evaluări
- Ford Drive Cycle Information: Inspection / Maintenance Set ProcedureDocument3 paginiFord Drive Cycle Information: Inspection / Maintenance Set Proceduresenthur123Încă nu există evaluări
- BULLET 350 KS TECHNICAL SPECSDocument2 paginiBULLET 350 KS TECHNICAL SPECSKamsutra YogiÎncă nu există evaluări
- Threads Unc, Unf, UnefDocument3 paginiThreads Unc, Unf, UnefIlya FuksmanÎncă nu există evaluări
- Wheatly XDocument2 paginiWheatly XElinton SarmientoÎncă nu există evaluări
- Maquinaria Naval Parte A-DDocument185 paginiMaquinaria Naval Parte A-DraulbrlunaÎncă nu există evaluări
- Cessna 172M CHECKLISTDocument3 paginiCessna 172M CHECKLISTDev ShahÎncă nu există evaluări
- Materi TM-300 28 Feb 2013Document26 paginiMateri TM-300 28 Feb 2013kharimulazizÎncă nu există evaluări
- 32 Landing GearDocument176 pagini32 Landing GearMaria Fernanda Nuñez RuizÎncă nu există evaluări
- 0303 MEA Multi V HeatpumpDocument119 pagini0303 MEA Multi V HeatpumpfatjoebirdÎncă nu există evaluări
- High-Temperature High-Strength Nickel-Base Alloys: A Practical Guide To The Use of Nickel-Containing Alloys N 393Document86 paginiHigh-Temperature High-Strength Nickel-Base Alloys: A Practical Guide To The Use of Nickel-Containing Alloys N 393DNH RND - VijaykumarÎncă nu există evaluări
- Curvilinear Motion and ProjectilesDocument15 paginiCurvilinear Motion and ProjectilesAltammar1367% (3)
- TM 5-811-6 Generator and Electrical Facilities DesignDocument26 paginiTM 5-811-6 Generator and Electrical Facilities DesignrockclaudiuÎncă nu există evaluări