S-ar putea să vă placă și
- Exercices d'intégrales et d'équations intégro-différentiellesDe la EverandExercices d'intégrales et d'équations intégro-différentiellesÎncă nu există evaluări
- M104 Materiaux AeronautiqueDocument75 paginiM104 Materiaux AeronautiqueMOhmmed taawytÎncă nu există evaluări
- Exii 2Document3 paginiExii 2Narjiss ShimiÎncă nu există evaluări
- Poutre Rectangulaire EurocodeDocument54 paginiPoutre Rectangulaire EurocodeMario Feghali80% (5)
- Aerodynamique de BaseDocument53 paginiAerodynamique de BaseAli ElmahaouiÎncă nu există evaluări
- RDM 1 PDFDocument100 paginiRDM 1 PDFazzamÎncă nu există evaluări
- Analyse Limite v2Document63 paginiAnalyse Limite v2zikows1Încă nu există evaluări
- Exerc Corrig RDMDocument7 paginiExerc Corrig RDMkhalidlkkkÎncă nu există evaluări
- Definition PoutreDocument30 paginiDefinition PoutreLeeTôshitoraÎncă nu există evaluări
- Enoncés TP RDM l2 GMDocument30 paginiEnoncés TP RDM l2 GMjahidÎncă nu există evaluări
- Rdmtorseurdecohesion PDFDocument4 paginiRdmtorseurdecohesion PDFMustafa MoussaouiÎncă nu există evaluări
- Cours - CM - 2 - Chapitre - 2 - Bases de Dimensionnement Des Structures en Acier - 11 - 12Document127 paginiCours - CM - 2 - Chapitre - 2 - Bases de Dimensionnement Des Structures en Acier - 11 - 12molk kallel100% (1)
- Mécanique Des Milieux ContinusDocument141 paginiMécanique Des Milieux ContinusalterevoÎncă nu există evaluări
- DC 16Document128 paginiDC 16Ha DjerÎncă nu există evaluări
- Simulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysDe la EverandSimulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysÎncă nu există evaluări
- Mini Projet CFDDocument37 paginiMini Projet CFDAnas Adlany100% (1)
- Galilei Et Einstein: Réflexions Sur La Théorie De La Relativité General - La Chute Libre Des CorpsDe la EverandGalilei Et Einstein: Réflexions Sur La Théorie De La Relativité General - La Chute Libre Des CorpsÎncă nu există evaluări
- Cours - Section Centre de Gravite Moment QuadratiqueDocument23 paginiCours - Section Centre de Gravite Moment QuadratiqueBENSAAOUD33% (3)
- RDM CH 5Document12 paginiRDM CH 5Mohamed KhribechÎncă nu există evaluări
- CI25 RDM Partie 2 FLEXION PDFDocument11 paginiCI25 RDM Partie 2 FLEXION PDFinglatif100% (1)
- 04 Flexion Simple PDFDocument15 pagini04 Flexion Simple PDFBouchraMahmoudiÎncă nu există evaluări
- MMC TD1Document7 paginiMMC TD1Mamoudou Bah Diallo100% (1)
- Contraintes DeformationsDocument67 paginiContraintes Deformationslaila lailaÎncă nu există evaluări
- M Ecanique Des Uides 2 PDFDocument108 paginiM Ecanique Des Uides 2 PDFabdelraoufÎncă nu există evaluări
- Circulaire 1934 Béton ArméDocument67 paginiCirculaire 1934 Béton ArméRicardo100% (1)
- Effort Dans Les Plaques PDFDocument11 paginiEffort Dans Les Plaques PDFchouidiÎncă nu există evaluări
- Elast EMD2 2003 PDFDocument2 paginiElast EMD2 2003 PDFhakimkorichi100% (1)
- Superalliage: Résistant à la chaleur de 2700 degrés Fahrenheit générée par les moteurs à turbine pour être plus chaud, plus rapide et plus efficaceDe la EverandSuperalliage: Résistant à la chaleur de 2700 degrés Fahrenheit générée par les moteurs à turbine pour être plus chaud, plus rapide et plus efficaceÎncă nu există evaluări
- Chapitre 5 Dynamique Fluide RéelDocument29 paginiChapitre 5 Dynamique Fluide RéelNowe AhmadeÎncă nu există evaluări
- RDM2Document153 paginiRDM2Amine Dhiba100% (1)
- MMC - MR NeifarDocument66 paginiMMC - MR NeifarKhalil MamiÎncă nu există evaluări
- Tenseur Des Contraintes PDFDocument42 paginiTenseur Des Contraintes PDFRamiro VillaÎncă nu există evaluări
- Poly TDMeca DefDocument96 paginiPoly TDMeca DefRIDA RadouaneÎncă nu există evaluări
- Resolution Numerique Des Equations Aux Derivees PartiellesDocument22 paginiResolution Numerique Des Equations Aux Derivees PartiellesLyna Meriem LAZLAOUIÎncă nu există evaluări
- TP MFDPDocument11 paginiTP MFDPOussema TrikiÎncă nu există evaluări
- MSDDocument24 paginiMSDMohamedRmouchÎncă nu există evaluări
- FlexionDocument15 paginiFlexionAhmed HamadaÎncă nu există evaluări
- Exam 2016Document3 paginiExam 2016SamÎncă nu există evaluări
- MMC PDFDocument74 paginiMMC PDFDamien MirandaÎncă nu există evaluări
- Diapos MMC Sept 2012Document153 paginiDiapos MMC Sept 2012mathlouthi safaÎncă nu există evaluări
- Exo Chapitre 2 Contraintes Milieu ContinuDocument6 paginiExo Chapitre 2 Contraintes Milieu ContinuDjelloul ReziniÎncă nu există evaluări
- TD3 - MMC - Option - 2017 - 2018Document2 paginiTD3 - MMC - Option - 2017 - 2018zakaria jamesÎncă nu există evaluări
- Tp1 Poutre en FlexionDocument15 paginiTp1 Poutre en FlexionYassine EL FAKHAOUIÎncă nu există evaluări
- Examen MMC 2011 2012 PDFDocument2 paginiExamen MMC 2011 2012 PDFMalik Mak0% (1)
- Correction MMC TD1 Ex 3Document5 paginiCorrection MMC TD1 Ex 3Khlif NadaÎncă nu există evaluări
- Ex Ef Matrice Raideur PoutreDocument3 paginiEx Ef Matrice Raideur Poutreipman99Încă nu există evaluări
- Transfert Thermique Cours 02Document89 paginiTransfert Thermique Cours 02Falinirina RMÎncă nu există evaluări
- Critère de Limite Élastique, Rankine, Tresca, Von Mises, Mohr Et Exercice - Rocd@cier, Forum Soudage Et ChaudronnerieDocument14 paginiCritère de Limite Élastique, Rankine, Tresca, Von Mises, Mohr Et Exercice - Rocd@cier, Forum Soudage Et ChaudronnerieAbdelhamid BabahÎncă nu există evaluări
- Dchapitre 4Document13 paginiDchapitre 4Salma ElkaddouriÎncă nu există evaluări
- Elasticite Et RDM Part IIDocument54 paginiElasticite Et RDM Part IIAbdelmoumen GuedriÎncă nu există evaluări
- Exemef (1) rdm6Document56 paginiExemef (1) rdm6Karima DoctoranteÎncă nu există evaluări
- Tenseur Des Contraintes - WikipédiaDocument7 paginiTenseur Des Contraintes - WikipédiaAmjed LaritÎncă nu există evaluări
- (6-LOI-COMPORTEMENT (Mode de Compatibilité) ) PDFDocument9 pagini(6-LOI-COMPORTEMENT (Mode de Compatibilité) ) PDFSoufiane ElÎncă nu există evaluări
- MMCDocument2 paginiMMCmsila samiÎncă nu există evaluări
- TD Serie2Document3 paginiTD Serie2Nowe Ahmade100% (1)
- Examen PR-2015-MMC ENIBDocument3 paginiExamen PR-2015-MMC ENIBZied AbidiÎncă nu există evaluări
- 3 TractionDocument15 pagini3 TractionAbderrazak NassiriÎncă nu există evaluări
- Chapitres 3-Charpente Mtalliques v2Document11 paginiChapitres 3-Charpente Mtalliques v2zikows1100% (1)
- Formulaire MMC PDFDocument4 paginiFormulaire MMC PDFazzamÎncă nu există evaluări
- Les Livres de RDMDocument1 paginăLes Livres de RDMمحمد الأمين شرفاويÎncă nu există evaluări
- MMC 1Document36 paginiMMC 1Abeka KaderÎncă nu există evaluări
- Polycopie09 Intranetv2Document157 paginiPolycopie09 Intranetv2karem754Încă nu există evaluări
- Formule RDMDocument24 paginiFormule RDMmirceaÎncă nu există evaluări
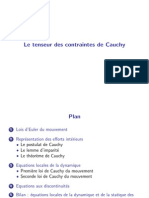
- Le Tenseur Des Contraintes de CauchyDocument59 paginiLe Tenseur Des Contraintes de CauchyKhireddine MimouniÎncă nu există evaluări
- Statique Des Fluides-CorrDocument7 paginiStatique Des Fluides-CorrCharaf LeoÎncă nu există evaluări
- Coursmmc Hlaurent UbsDocument121 paginiCoursmmc Hlaurent UbsYASSINÎncă nu există evaluări
- Synthèse Bibliographique Des Outils D'évaluation Du Ruissellement - Sept2010 - 2Document22 paginiSynthèse Bibliographique Des Outils D'évaluation Du Ruissellement - Sept2010 - 2YASSINÎncă nu există evaluări
- Résumé Cours EVALUATION UTF-8bRDocument5 paginiRésumé Cours EVALUATION UTF-8bRYASSINÎncă nu există evaluări
- TS Nomenclature 1SDocument4 paginiTS Nomenclature 1SYASSINÎncă nu există evaluări
- Exercices Organique Corrige Web PDFDocument11 paginiExercices Organique Corrige Web PDFYASSINÎncă nu există evaluări
- StageDocument25 paginiStageYASSINÎncă nu există evaluări
- Fiche Technique ErragueneDocument2 paginiFiche Technique ErragueneYASSIN100% (1)
- Lettre de MotivationDocument1 paginăLettre de MotivationYASSINÎncă nu există evaluări
- Chapitre 1 Presentation de La VilleDocument5 paginiChapitre 1 Presentation de La VilleYASSIN100% (1)
- Controle SMP3 2016 17Document5 paginiControle SMP3 2016 17Aminos MaÎncă nu există evaluări
- DS1 2023Document7 paginiDS1 2023Saifeddine BrikiÎncă nu există evaluări
- 6 - CH PompeDocument7 pagini6 - CH PompeDehia BezzinaÎncă nu există evaluări
- (Edm) (TD) Chaise D EscalierDocument2 pagini(Edm) (TD) Chaise D EscalierJunior KamdemÎncă nu există evaluări
- Ilovepdf MergedDocument60 paginiIlovepdf MergedzerroukobeidaÎncă nu există evaluări
- Ryr 5 yDocument9 paginiRyr 5 ysaidÎncă nu există evaluări
- Ch3-Thermo & TurbomDocument13 paginiCh3-Thermo & TurbomHermas SEYIKPE100% (1)
- Exercices de La Thermodynamique Appliquée1Document3 paginiExercices de La Thermodynamique Appliquée1minhtuanbk202Încă nu există evaluări
- Exo Chapitre 3 Loi Comportement Milieux ContinusDocument8 paginiExo Chapitre 3 Loi Comportement Milieux ContinusDjelloul ReziniÎncă nu există evaluări
- Chap 3 Calcul Des Batiments Métalliques 0Document37 paginiChap 3 Calcul Des Batiments Métalliques 0Habibe Tran-van100% (1)
- Soltani, AghilesDocument163 paginiSoltani, AghilesJan stevens Vargas cardonaÎncă nu există evaluări
- Slides Robotique Master GSBDocument93 paginiSlides Robotique Master GSBLawrd RrafieÎncă nu există evaluări
- Exo Cinematique CompletDocument10 paginiExo Cinematique CompletOumayma EttalbiÎncă nu există evaluări
- Calcule Des VoilesDocument19 paginiCalcule Des VoilesMed Amine Rifi100% (1)
- Mécanique Du Solide-Chapitre1Document22 paginiMécanique Du Solide-Chapitre1Lengani Kader EvariceÎncă nu există evaluări
- Contraintes Dans Les SolsDocument6 paginiContraintes Dans Les SolsKarim GaussÎncă nu există evaluări
- 1 AHLAFI Cours Infra RougeDocument33 pagini1 AHLAFI Cours Infra RougeZerÎncă nu există evaluări
- ThermoregulationCycliste EtoileDouble ModulationDocument33 paginiThermoregulationCycliste EtoileDouble ModulationMUSTAPHA BAHLASÎncă nu există evaluări
- DS 8 2016Document8 paginiDS 8 2016Abderrahman MamouniÎncă nu există evaluări
- CNC Tsi 2016 Physique 1 EpreuveDocument10 paginiCNC Tsi 2016 Physique 1 Epreuveabderrahim najimÎncă nu există evaluări
- Éléments Finis Mixtes Et Équations de Stokes PDFDocument17 paginiÉléments Finis Mixtes Et Équations de Stokes PDFSiŗ MèDoxÎncă nu există evaluări
- Etude D Une Thermistance en Utilisation Bolométrique Pour La Détermination À Distance de La Température D Un Corps PDFDocument6 paginiEtude D Une Thermistance en Utilisation Bolométrique Pour La Détermination À Distance de La Température D Un Corps PDFNSANGOU100% (1)