S-ar putea să vă placă și
- Cuidado Integral de ActivosDocument21 paginiCuidado Integral de Activosaqccc120Încă nu există evaluări
- Manual Ingenieria y Gestión de Mantenimiento Modulo II PDFDocument408 paginiManual Ingenieria y Gestión de Mantenimiento Modulo II PDFaqccc120Încă nu există evaluări
- Pdvsa Taxonomia de Activos MM 01 01 07 PDFDocument29 paginiPdvsa Taxonomia de Activos MM 01 01 07 PDFrpdicÎncă nu există evaluări
- Anexo 1-b. - Curso Software Sel 5601 Cfe-0202-Cssan-0006-2019Document1 paginăAnexo 1-b. - Curso Software Sel 5601 Cfe-0202-Cssan-0006-2019aqccc120Încă nu există evaluări
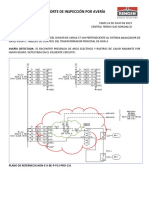
- Analisis Causa Raiz Falla Sensor de Carga Trafo Non-2Document5 paginiAnalisis Causa Raiz Falla Sensor de Carga Trafo Non-2aqccc120Încă nu există evaluări
- 4.curso de Gestion de AvisosDocument50 pagini4.curso de Gestion de Avisosaqccc120Încă nu există evaluări
- Maquinas Eléctricas IIDocument165 paginiMaquinas Eléctricas IIRafaLara100% (1)
- Programa Arduino Graficar Ondas Senoidales Sistema HexafasicoDocument2 paginiPrograma Arduino Graficar Ondas Senoidales Sistema Hexafasicoaqccc120Încă nu există evaluări
- Desarrollo de Algoritmos y Tecnicas de Programación en Pascal ED RA-MADocument557 paginiDesarrollo de Algoritmos y Tecnicas de Programación en Pascal ED RA-MAkelrobÎncă nu există evaluări
- Programa Arduino Graficar Ondas Senoidales Sistema Hexafasico PDFDocument2 paginiPrograma Arduino Graficar Ondas Senoidales Sistema Hexafasico PDFaqccc120Încă nu există evaluări
- Curva de Capabilidad Generador Non-1Document1 paginăCurva de Capabilidad Generador Non-1aqccc120Încă nu există evaluări
- Hexaphasic System With ArduinoDocument37 paginiHexaphasic System With Arduinoaqccc120Încă nu există evaluări
- Cables Comerciales y Componentes de Cableado EstructuradoDocument92 paginiCables Comerciales y Componentes de Cableado EstructuradoFernando Gonzalez CastroÎncă nu există evaluări
- LINEAS DE DISTRIBUCIÓN NDocument121 paginiLINEAS DE DISTRIBUCIÓN Naqccc12033% (3)
- Curso básico de sistemas eléctricosDocument2 paginiCurso básico de sistemas eléctricosaqccc120100% (1)
- Programacion de Adecuacion de Desaladores Rev 5Document5 paginiProgramacion de Adecuacion de Desaladores Rev 5aqccc120Încă nu există evaluări
- Consumos Mediciones Tarifas NDocument120 paginiConsumos Mediciones Tarifas Naqccc120Încă nu există evaluări
- Lineas de Transmision NDocument142 paginiLineas de Transmision Naqccc120Încă nu există evaluări
- OFERTA NATCO Adecuacion Desaladores Rev 5Document108 paginiOFERTA NATCO Adecuacion Desaladores Rev 5aqccc120Încă nu există evaluări
- Distribución Aerea PDFDocument21 paginiDistribución Aerea PDFaqccc120Încă nu există evaluări
- Listado Modelos Dinamicos Admitidos Por Operador Sistema Marzo 2016Document27 paginiListado Modelos Dinamicos Admitidos Por Operador Sistema Marzo 2016aqccc120Încă nu există evaluări
- 425-04 Herraje Grillete Tipo Omega PDFDocument22 pagini425-04 Herraje Grillete Tipo Omega PDFaqccc120Încă nu există evaluări
- Numeros ComplejosDocument2 paginiNumeros Complejosaqccc120Încă nu există evaluări
- Descripcion DesalacionDocument10 paginiDescripcion Desalacionaqccc120Încă nu există evaluări
- Dimensionamiento de CrucetasDocument3 paginiDimensionamiento de Crucetasaqccc120Încă nu există evaluări
- VF000 72Document42 paginiVF000 72luisÎncă nu există evaluări
- Demanda DiversificadaDocument4 paginiDemanda Diversificadaaqccc120Încă nu există evaluări
- Datos de Linea de DistribucionDocument1 paginăDatos de Linea de DistribucionJose Rafael FigueroaÎncă nu există evaluări
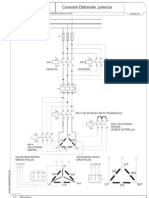
- Ace Conex Dalhander PotenciaDocument1 paginăAce Conex Dalhander PotenciaFreddy EstallaÎncă nu există evaluări
- Resolver inecuaciones de primer y segundo gradoDocument10 paginiResolver inecuaciones de primer y segundo gradoJuan David CastilloÎncă nu există evaluări
- Relación Tema 7. Ecuaciones 2º Grado. SolucionesDocument2 paginiRelación Tema 7. Ecuaciones 2º Grado. SolucionesE&GÎncă nu există evaluări
- Eva 22016 Octubre 03Document7 paginiEva 22016 Octubre 03Rolando PayhuancaÎncă nu există evaluări
- Integrales Acompletacion de CuadradosDocument13 paginiIntegrales Acompletacion de CuadradosJose Maria May LeonÎncă nu există evaluări
- Algebra Trigonometria y Geometria Analitica Lic en Matematicas Tarea 7 8 1 1Document18 paginiAlgebra Trigonometria y Geometria Analitica Lic en Matematicas Tarea 7 8 1 1Silvana BotelloÎncă nu există evaluări
- Autoevaluacion de EcuacionesDocument2 paginiAutoevaluacion de EcuacionesZulita ReyesÎncă nu există evaluări
- Ecuaciones Diferenciales1Document27 paginiEcuaciones Diferenciales1OctavioÎncă nu există evaluări
- 4.5 2do-3ro ABC Fernando Naranjo Semana 15 Factorización p3Document3 pagini4.5 2do-3ro ABC Fernando Naranjo Semana 15 Factorización p3AngelesÎncă nu există evaluări
- Separata 3do - 2017Document4 paginiSeparata 3do - 2017luisÎncă nu există evaluări
- 07 - Nivelacion - Matematica SEMANA 7 PDFDocument15 pagini07 - Nivelacion - Matematica SEMANA 7 PDFcamiloÎncă nu există evaluări
- Fraccion GeneratrizDocument7 paginiFraccion GeneratrizJorge Luis Mego RomeroÎncă nu există evaluări
- Guía #1 Matemática Números Letras Ecuaciones Una Buena Combinación PDFDocument42 paginiGuía #1 Matemática Números Letras Ecuaciones Una Buena Combinación PDFOdipza Lopez50% (2)
- Trabajo PersonalDocument16 paginiTrabajo PersonalDe La Tribu NipiÎncă nu există evaluări
- Ecuación circunferencia puntos intersecciónDocument26 paginiEcuación circunferencia puntos intersecciónranatumadreÎncă nu există evaluări
- Grado 3° Guia 5Document10 paginiGrado 3° Guia 5Jorge Luis Sánchez MendozaÎncă nu există evaluări
- Examen extraordinario de matemáticas I secundaria Oaxaca guía estudio problemasDocument7 paginiExamen extraordinario de matemáticas I secundaria Oaxaca guía estudio problemasEduardo SalgadoÎncă nu există evaluări
- Ecuaciones diferenciales ordinarias de primer ordenDocument38 paginiEcuaciones diferenciales ordinarias de primer ordenBraulio Ubario PargaÎncă nu există evaluări
- Tarea 2 Brillyn Narvaez VargasDocument13 paginiTarea 2 Brillyn Narvaez VargasbillinoÎncă nu există evaluări
- ECUACIONESDocument23 paginiECUACIONESJuliet RomeroÎncă nu există evaluări
- Repaso de MatemáticasDocument2 paginiRepaso de MatemáticasJosé Ángel Ramos LatorreÎncă nu există evaluări
- Plan de Clase n6Document7 paginiPlan de Clase n6marcosmnjb marcosmnjbÎncă nu există evaluări
- AlgebraDocument11 paginiAlgebraRICARDO T.Încă nu există evaluări
- Ecuaciones e inecuaciones de primer y segundo gradoDocument2 paginiEcuaciones e inecuaciones de primer y segundo gradoRamón Darío VilteÎncă nu există evaluări
- Radicacion Ejercicios ResueltosDocument21 paginiRadicacion Ejercicios ResueltosMiguel ArragaÎncă nu există evaluări
- Matematicas CuadernoDocument33 paginiMatematicas Cuadernoximena revillaÎncă nu există evaluări
- Modulo 4 - Ecuaciones PDFDocument21 paginiModulo 4 - Ecuaciones PDFKarina ParísÎncă nu există evaluări
- Factorizacion PDFDocument4 paginiFactorizacion PDFJhon Smith Ramos XtdlvdÎncă nu există evaluări
- Numeros RacionalesDocument6 paginiNumeros RacionalesCristin MillerÎncă nu există evaluări
- Ecuaciones Diferenciales de Orden Superior TeoríaDocument19 paginiEcuaciones Diferenciales de Orden Superior Teoríamardo95Încă nu există evaluări