S-ar putea să vă placă și
- SSP 021br T-CROSS LAMDocument51 paginiSSP 021br T-CROSS LAMGarage82 Engenharia de SoftwareÎncă nu există evaluări
- Garantia e Manutenção: Delivery 9-170/11-180Document90 paginiGarantia e Manutenção: Delivery 9-170/11-180Mateus almeida santos0% (1)
- Simulado Conhecimentos TecnicosDocument4 paginiSimulado Conhecimentos TecnicosLucas BezerraÎncă nu există evaluări
- Aula 3.2 - Dobra em TubosDocument14 paginiAula 3.2 - Dobra em TubosJuan AlvesÎncă nu există evaluări
- H - Aula 8 - Corrente Alternada Monofásica e TrifásicaDocument26 paginiH - Aula 8 - Corrente Alternada Monofásica e TrifásicaAmilcar BarumÎncă nu există evaluări
- CR6080Document12 paginiCR6080Rafael Romero FernandesÎncă nu există evaluări
- FOP MF7150 (Baixa)Document2 paginiFOP MF7150 (Baixa)VitorMelloÎncă nu există evaluări
- Cameron U & UM BOP Standard AccessoriesDocument20 paginiCameron U & UM BOP Standard AccessoriesIFACOÎncă nu există evaluări
- Manual de Operacion de RT 780Document376 paginiManual de Operacion de RT 780nerit0loco83100% (1)
- Manual de Instruções CPVR20-30Document48 paginiManual de Instruções CPVR20-30UILSONÎncă nu există evaluări
- Manual Scooter Sym Jet 14 125ccDocument31 paginiManual Scooter Sym Jet 14 125ccNunoÎncă nu există evaluări
- Aula 8 Regra Dos 3 VDocument8 paginiAula 8 Regra Dos 3 VAmilcar Barum100% (1)
- E Let Ro Magnetism oDocument34 paginiE Let Ro Magnetism oAmilcar BarumÎncă nu există evaluări
- E Let Ro Magnetism oDocument34 paginiE Let Ro Magnetism oAmilcar BarumÎncă nu există evaluări
- Aula 4 Cartografia e EscalaDocument41 paginiAula 4 Cartografia e EscalaAmilcar BarumÎncă nu există evaluări
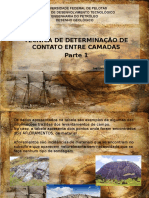
- Aula 9 Determinação de Contato Parte 1Document10 paginiAula 9 Determinação de Contato Parte 1Amilcar BarumÎncă nu există evaluări
- Aula 5 Mapa Topografico e Mapa GeologicaDocument38 paginiAula 5 Mapa Topografico e Mapa GeologicaAmilcar BarumÎncă nu există evaluări
- Aula 2 - Campo Elétrico e Potencial ElétricoDocument16 paginiAula 2 - Campo Elétrico e Potencial ElétricoAmilcar BarumÎncă nu există evaluări
- Aula 8 Regra Dos 3 VDocument8 paginiAula 8 Regra Dos 3 VAmilcar Barum100% (1)
- Aula 8Document21 paginiAula 8Amilcar BarumÎncă nu există evaluări
- Quarta AulaDocument8 paginiQuarta AulaAmilcar BarumÎncă nu există evaluări
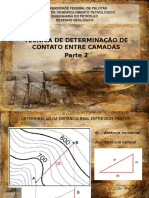
- Aula 9 Determinação de Contato Parte 2Document11 paginiAula 9 Determinação de Contato Parte 2Amilcar BarumÎncă nu există evaluări
- 6 Quinta AulaDocument16 pagini6 Quinta AulaAmilcar BarumÎncă nu există evaluări
- Aula 4 Cartografia e EscalaDocument41 paginiAula 4 Cartografia e EscalaAmilcar BarumÎncă nu există evaluări
- Aula 2 BussolaDocument27 paginiAula 2 BussolaAmilcar BarumÎncă nu există evaluări
- Aula de Proteção ElétricaDocument21 paginiAula de Proteção ElétricaAmilcar BarumÎncă nu există evaluări
- Aula 6 Perfil GeológicoDocument8 paginiAula 6 Perfil GeológicoAmilcar Barum100% (2)
- Aula 9 Determinação de Contato Parte 1Document10 paginiAula 9 Determinação de Contato Parte 1Amilcar BarumÎncă nu există evaluări
- A - Aula 1 - Carga ElétricaDocument31 paginiA - Aula 1 - Carga ElétricaAmilcar BarumÎncă nu există evaluări
- Aula 6Document28 paginiAula 6Amilcar BarumÎncă nu există evaluări
- Aula 3Document57 paginiAula 3Amilcar BarumÎncă nu există evaluări
- Aula 9 - Capacitores em Corrente AlternadaDocument13 paginiAula 9 - Capacitores em Corrente AlternadaAmilcar BarumÎncă nu există evaluări
- Aula 5Document24 paginiAula 5Amilcar BarumÎncă nu există evaluări
- Aula 5Document24 paginiAula 5Amilcar BarumÎncă nu există evaluări
- Aula 2Document18 paginiAula 2Amilcar BarumÎncă nu există evaluări
- Aula 2Document18 paginiAula 2Amilcar BarumÎncă nu există evaluări
- Aula 2Document18 paginiAula 2Amilcar BarumÎncă nu există evaluări
- Apresentação e Aula 1Document24 paginiApresentação e Aula 1Amilcar BarumÎncă nu există evaluări
- Aula 3Document57 paginiAula 3Amilcar BarumÎncă nu există evaluări
- NBR 12624 - 2004 - Perfil de Elastômero para Vedação de Junt PDFDocument8 paginiNBR 12624 - 2004 - Perfil de Elastômero para Vedação de Junt PDFLeonardo Otto Coutinho0% (2)
- Manual de Instrucao XAS187PdDocument64 paginiManual de Instrucao XAS187Pdalmir100% (1)
- Fenomenos - Lista de ExerciciosDocument5 paginiFenomenos - Lista de ExerciciosFelipeBandeiraÎncă nu există evaluări
- Apresentação Da Disciplina de Mecânica Dos Fluidos 2015-1Document1 paginăApresentação Da Disciplina de Mecânica Dos Fluidos 2015-1Pedro RBÎncă nu există evaluări
- Material de Estudo MS1 12aDocument7 paginiMaterial de Estudo MS1 12agirininÎncă nu există evaluări
- Et Motorredutor QDR 115Document1 paginăEt Motorredutor QDR 115Roni AlmeidaÎncă nu există evaluări
- Aula 7 - Escoamento ViscosoDocument102 paginiAula 7 - Escoamento ViscosoSilvana PalmeiraÎncă nu există evaluări
- Relatório de Visita Técnica A Termoelétrica Tractebel AlegreteDocument13 paginiRelatório de Visita Técnica A Termoelétrica Tractebel AlegreteLuiz Felipe de OliveiraÎncă nu există evaluări
- Cap1 Criterios2010Document34 paginiCap1 Criterios2010Alfredo AlarÎncă nu există evaluări
- Caminhao Pipa 6X4 VM 260: Pagina 1/3Document3 paginiCaminhao Pipa 6X4 VM 260: Pagina 1/3Marcos PauloÎncă nu există evaluări
- Fundações e Contenções - Parte 1Document128 paginiFundações e Contenções - Parte 1Natan SanchoÎncă nu există evaluări
- Manual de Utilização Knikmops - PortuguêsDocument98 paginiManual de Utilização Knikmops - PortuguêsiverlaneÎncă nu există evaluări
- Aneis - Anilhas - Arruelas de Vedacao RCDocument17 paginiAneis - Anilhas - Arruelas de Vedacao RCrodrigoÎncă nu există evaluări
- Aula - Cap 3 Fitz - RaulDocument77 paginiAula - Cap 3 Fitz - RaulJoão LucasÎncă nu există evaluări
- AV3 Resistência Dos Materiais 2015.2Document6 paginiAV3 Resistência Dos Materiais 2015.2arthusnambrowicÎncă nu există evaluări
- Fichatecnica15180 PDFDocument4 paginiFichatecnica15180 PDFalexÎncă nu există evaluări
- 1-Caldeiraria e Tubulação IndustrialDocument17 pagini1-Caldeiraria e Tubulação IndustrialricardoÎncă nu există evaluări
- Mecanica Dos FluidosDocument15 paginiMecanica Dos FluidosDanielaKunzÎncă nu există evaluări
- Termostato Rotativo.Document2 paginiTermostato Rotativo.Marcos Paulo Rocha MirandaÎncă nu există evaluări