S-ar putea să vă placă și
- Diapositiva 13 Matriz InversaDocument18 paginiDiapositiva 13 Matriz InversaANDERSONÎncă nu există evaluări
- TEMA 5 Transformaciones LinealesDocument4 paginiTEMA 5 Transformaciones LinealesLalo AlmarazÎncă nu există evaluări
- Como Comprobar Una Matriz Inversa Con Geogebra PantallazosDocument29 paginiComo Comprobar Una Matriz Inversa Con Geogebra PantallazosRodrigo Ignacio MéndezÎncă nu există evaluări
- Arreglos ProcessingDocument4 paginiArreglos ProcessingLuis Rios CarrilloÎncă nu există evaluări
- MentefactoDocument1 paginăMentefactosirodetaÎncă nu există evaluări
- Combinaciones lineales en geometría analíticaDocument20 paginiCombinaciones lineales en geometría analíticaAlessio ShooterÎncă nu există evaluări
- Guia 36Document67 paginiGuia 36mijacoar100% (2)
- Trabajo colaborativo escenarios 3-4-5 algebra linealDocument9 paginiTrabajo colaborativo escenarios 3-4-5 algebra linealLuis Alberto Arango Garcia100% (1)
- Práctica de Laboratorio # 1 Principios de Circuitos EléctricosDocument13 paginiPráctica de Laboratorio # 1 Principios de Circuitos EléctricosJUAN ESTEBAN ZULUAGA PAREDESÎncă nu există evaluări
- Estructuras de OrdenDocument9 paginiEstructuras de Ordenbryan100% (1)
- Fase 2 - Test Ecuaciones DiferencialesDocument8 paginiFase 2 - Test Ecuaciones DiferencialesRenzo Alexander RestrepoÎncă nu există evaluări
- Forma Normal ChomskyDocument8 paginiForma Normal ChomskyLove GardenÎncă nu există evaluări
- Algoritmos y Estructuras de DatosDocument192 paginiAlgoritmos y Estructuras de DatosAaronDaniel CarrilloTorrezÎncă nu există evaluări
- Compendio Test EnrutDocument85 paginiCompendio Test EnrutWILSON DANIEL SANTANA CASQUETEÎncă nu există evaluări
- Clase 5 Algoritmos de Busqueda y ClasificacionDocument66 paginiClase 5 Algoritmos de Busqueda y ClasificacionAngelytaÎncă nu există evaluări
- Sistema de Control - (Carrito Seguidor de Linea)Document16 paginiSistema de Control - (Carrito Seguidor de Linea)Ronaldo MendietaÎncă nu există evaluări
- Aplicación de Física en La Carrera de IngenieríaDocument12 paginiAplicación de Física en La Carrera de IngenieríacrisfranpasquelÎncă nu există evaluări
- Proyecto MecánicaDocument4 paginiProyecto MecánicaSmyk Carlos Eduardo GuerraÎncă nu există evaluări
- 3 - Geometría AnalíticaDocument72 pagini3 - Geometría AnalíticaRené Domingo Franco Pedraza50% (2)
- Movimientos del robot Mitsubishi RV2AJDocument17 paginiMovimientos del robot Mitsubishi RV2AJDavid LagunasÎncă nu există evaluări
- Ecuaciones LinealesDocument30 paginiEcuaciones LinealesYuridia CastroÎncă nu există evaluări
- Soluciones de Ecuaciones en Una Variable Metodos CerradosDocument70 paginiSoluciones de Ecuaciones en Una Variable Metodos CerradosYeferson PerezÎncă nu există evaluări
- Flask PythonDocument1 paginăFlask PythonSantiago MuñozÎncă nu există evaluări
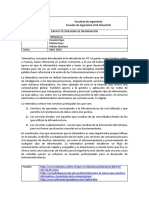
- Telemática: Unión de Telecomunicaciones e InformáticaDocument2 paginiTelemática: Unión de Telecomunicaciones e Informáticawilson QuintanaÎncă nu există evaluări
- PARTE II, Lógica MatemáticaDocument24 paginiPARTE II, Lógica MatemáticaCarmen Jama100% (1)
- Modulo Clei V FisicaDocument112 paginiModulo Clei V Fisicaangeldemadrid80% (5)
- Mecanica de FluidosDocument3 paginiMecanica de Fluidosvictor20008Încă nu există evaluări
- (Sesion03) Introduccion PythonDocument47 pagini(Sesion03) Introduccion PythonSnell FloresÎncă nu există evaluări
- Sistemas Distribuidos Tiempo RealDocument28 paginiSistemas Distribuidos Tiempo RealAlejandro AguilarÎncă nu există evaluări
- Aporte 3 - Teorema de BayerDocument3 paginiAporte 3 - Teorema de BayerFernando Pedraza0% (1)
- ED BusquedaDocument30 paginiED BusquedaJaito JavierÎncă nu există evaluări
- Conceptos Generales de Señales y SistemasDocument70 paginiConceptos Generales de Señales y SistemasJHON JAIRO VEJAR CABALLEROÎncă nu există evaluări
- Análisis Sintáctico y Matriz PredictivaDocument10 paginiAnálisis Sintáctico y Matriz PredictivaIrvin G. Contreras García0% (1)
- InstallDocument8 paginiInstallJavier Juarez AlcantaraÎncă nu există evaluări
- Ejercicios ProgramacionDocument2 paginiEjercicios ProgramacionJessica0% (1)
- Importancia Del Calculo VectorialDocument12 paginiImportancia Del Calculo VectorialMichelle Miranda PalenciaÎncă nu există evaluări
- Calculo Vectorial Examen U2-MikeDocument3 paginiCalculo Vectorial Examen U2-MikeRoberto CuellarÎncă nu există evaluări
- Ejercicios Resueltos de MatricesDocument10 paginiEjercicios Resueltos de MatricesMartin RomeroÎncă nu există evaluări
- Clase Desigualdades e InecuacionesDocument17 paginiClase Desigualdades e Inecuacionesmyriamruby50% (2)
- Laminas 2 ScilabDocument77 paginiLaminas 2 Scilabwagner quijijeÎncă nu există evaluări
- Simplificacion de Expresion BooleanaDocument5 paginiSimplificacion de Expresion BooleanaJere JamaÎncă nu există evaluări
- Guia de Actividad 3 - Desarrollo de Un SBCDocument4 paginiGuia de Actividad 3 - Desarrollo de Un SBCNazareth Z. NavarreteÎncă nu există evaluări
- Estructura de Diagrama de ClasesDocument2 paginiEstructura de Diagrama de ClasesÁngel GonzalesÎncă nu există evaluări
- Método Simplex 40Document6 paginiMétodo Simplex 40Katherine Liberona IrarrazabalÎncă nu există evaluări
- Compuertas Logicas y Algebra de BooleDocument17 paginiCompuertas Logicas y Algebra de BooleAnonymous lrrwBxUYÎncă nu există evaluări
- Taller 4 ProbabilidadesDocument3 paginiTaller 4 ProbabilidadesCesar A Hernandez HÎncă nu există evaluări
- Ejemplo CholeskyDocument3 paginiEjemplo CholeskyDiego Del CastilloÎncă nu există evaluări
- Preinforme 1 666Document4 paginiPreinforme 1 666Michel MerchanÎncă nu există evaluări
- Cuadernillo de Ejercicios Sistemas NumericosDocument3 paginiCuadernillo de Ejercicios Sistemas Numericosalexander chitoÎncă nu există evaluări
- Búsqueda Primero en AnchuraDocument5 paginiBúsqueda Primero en AnchuraPanduriTo HansÎncă nu există evaluări
- Blbliograf - Big Data - Nivel B PDFDocument5 paginiBlbliograf - Big Data - Nivel B PDFDaniel Suavita MurilloÎncă nu există evaluări
- Proyecto Final Teoría General de SistemasDocument8 paginiProyecto Final Teoría General de SistemasMarleni Irigoin DelgadoÎncă nu există evaluări
- Respuestas Quiz DinamicaDocument18 paginiRespuestas Quiz DinamicaNormaConstanzaPuentesDuranÎncă nu există evaluări
- Calculo Numerico y Mecanica Celeste PDFDocument15 paginiCalculo Numerico y Mecanica Celeste PDFcrisÎncă nu există evaluări
- 3 1 ExpresionesRegularesDocument50 pagini3 1 ExpresionesRegularesOscar Andres Gil GámezÎncă nu există evaluări
- RecursividadDocument21 paginiRecursividadGonzalo Pantoja SantanderÎncă nu există evaluări
- Practica1 Semana1 ElectroDocument8 paginiPractica1 Semana1 ElectroCristobal TorresÎncă nu există evaluări
- S10-Combinacion LinealDocument37 paginiS10-Combinacion LinealJuber Calderon100% (1)
- Semana 4Document24 paginiSemana 4Miguel Angel QuispeÎncă nu există evaluări
- Combinaciones lineales y bases vectorialesDocument27 paginiCombinaciones lineales y bases vectorialesJordy Aquino LopezÎncă nu există evaluări
- Ángulo en Posición NormalDocument7 paginiÁngulo en Posición NormalJUAN MEDINA CRUZADO100% (1)
- Dimensión SocialDocument3 paginiDimensión SocialdaydaÎncă nu există evaluări
- CUPONESDocument2 paginiCUPONESJUAN MEDINA CRUZADOÎncă nu există evaluări
- Álgebra 2020 IDocument9 paginiÁlgebra 2020 IJUAN MEDINA CRUZADOÎncă nu există evaluări
- Álgebra 2020 IDocument9 paginiÁlgebra 2020 IJUAN MEDINA CRUZADOÎncă nu există evaluări
- FormatoDocument1 paginăFormatoJUAN MEDINA CRUZADOÎncă nu există evaluări
- Ejemplo de SesionDocument13 paginiEjemplo de SesionfjverabaÎncă nu există evaluări
- Tercero A Ferreñafe Ecodi 5Document3 paginiTercero A Ferreñafe Ecodi 5JUAN MEDINA CRUZADOÎncă nu există evaluări
- 2 - Diario de ClasesDocument2 pagini2 - Diario de ClasesJUAN MEDINA CRUZADOÎncă nu există evaluări
- SEMANA 8 Teoremas de Rolle y LagrangeDocument18 paginiSEMANA 8 Teoremas de Rolle y LagrangeJUAN MEDINA CRUZADOÎncă nu există evaluări
- 1-Geo-Rubik 2019-IiDocument4 pagini1-Geo-Rubik 2019-IiJUAN MEDINA CRUZADOÎncă nu există evaluări
- Sesión 4 - Planos Euclidiano y Sus EcuacionesDocument18 paginiSesión 4 - Planos Euclidiano y Sus EcuacionesJUAN MEDINA CRUZADOÎncă nu există evaluări
- Curso TIC's Excel 2010Document2 paginiCurso TIC's Excel 2010HectorJosePanganGaliciaÎncă nu există evaluări
- Gastón González (Relator Experto)Document1 paginăGastón González (Relator Experto)gaston6711Încă nu există evaluări
- Taller de La Memoria RAMDocument7 paginiTaller de La Memoria RAMJuan Sebastian Parrado Romero100% (3)
- Tarea Estrategias Avanz. Control PDFDocument24 paginiTarea Estrategias Avanz. Control PDFjoshuac4Încă nu există evaluări
- Tesis HTML5 y MongoDB Con PHPDocument315 paginiTesis HTML5 y MongoDB Con PHPChxto HenryÎncă nu există evaluări
- Formato de Autorización para El Tratamiento de Datos PersonalesDocument2 paginiFormato de Autorización para El Tratamiento de Datos PersonalesragazziÎncă nu există evaluări
- Unidad 3 Pruebas de SoftwareDocument26 paginiUnidad 3 Pruebas de SoftwareHardways MediaÎncă nu există evaluări
- Tesis Sistemas InformaticosDocument28 paginiTesis Sistemas InformaticosDanitza Saavedra100% (1)
- Genexus Descripcion Reportes en PDFDocument2 paginiGenexus Descripcion Reportes en PDFNelson AlvarezÎncă nu există evaluări
- Herramientas básicas de Presto 10Document46 paginiHerramientas básicas de Presto 10Álvaro RodríguezÎncă nu există evaluări
- Práctica Semana 04Document19 paginiPráctica Semana 04GIANPIER YNOCENTE SANCHEZÎncă nu există evaluări
- Uso de Flashback OracleDocument9 paginiUso de Flashback OracleKaterin GutierrezÎncă nu există evaluări
- AIRGRIDDocument43 paginiAIRGRIDJoel SiñaniÎncă nu există evaluări
- Universidad: Protocolo SNMP (Protocolo Sencillo de Administración de Redes)Document13 paginiUniversidad: Protocolo SNMP (Protocolo Sencillo de Administración de Redes)Valentina VejeroÎncă nu există evaluări
- Reconocimiento de PlanosDocument7 paginiReconocimiento de PlanosHumberto Vasquez VilcaÎncă nu există evaluări
- Analisis ERPDocument3 paginiAnalisis ERPMohamed Mondul100% (1)
- 2-Conjuntos Relaciones Funciones y Logica 2012Document42 pagini2-Conjuntos Relaciones Funciones y Logica 2012humbertokomes5Încă nu există evaluări
- SNMP Tele 2Document21 paginiSNMP Tele 2NahQueVer159Încă nu există evaluări
- Tipos de Costos para La Toma de DecisionesDocument6 paginiTipos de Costos para La Toma de DecisionesMarjy MarcanoÎncă nu există evaluări
- Jhon Alejandro Cañizales Pereira: PerfilDocument10 paginiJhon Alejandro Cañizales Pereira: PerfilJhon CañizalesÎncă nu există evaluări
- Control Remoto SonakiDocument2 paginiControl Remoto SonakiJimmy ReyÎncă nu există evaluări
- Lección 7Document5 paginiLección 7لويس أنتوني نونيزÎncă nu există evaluări
- Simpro 2Document21 paginiSimpro 2Luz Mery Yapo VilcaÎncă nu există evaluări
- Simulación LAN con servidores Web, DNS y DHCPDocument12 paginiSimulación LAN con servidores Web, DNS y DHCPDario RedrobanÎncă nu există evaluări
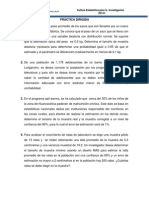
- Ejercicios Practica Dirigida3Document3 paginiEjercicios Practica Dirigida3LincolnMirandaLiuzziÎncă nu există evaluări
- Edictos y Clasificados - Julio 11 de 2019Document1 paginăEdictos y Clasificados - Julio 11 de 2019La LibertadÎncă nu există evaluări
- Cuadro de VariablesDocument4 paginiCuadro de VariablesJuanCarlosMiguelPerezÎncă nu există evaluări
- Probabilidad de error en ecografíaDocument3 paginiProbabilidad de error en ecografíaAna Cecilia MonteblancoÎncă nu există evaluări
- Modelos de CalidadDocument41 paginiModelos de Calidadorlandini2000Încă nu există evaluări
- Actividades Clave de La LogisticaDocument2 paginiActividades Clave de La LogisticaCRISTP´HERÎncă nu există evaluări