S-ar putea să vă placă și
- Beer Estatica 8e Diapositivas Cap1Document8 paginiBeer Estatica 8e Diapositivas Cap1Roberto HenríquezÎncă nu există evaluări
- Beer Dinamica 9e Presentacion PPT c15Document64 paginiBeer Dinamica 9e Presentacion PPT c15CarlosÎncă nu există evaluări
- Mecanica Vectorial para IngenierosDocument597 paginiMecanica Vectorial para IngenierosAlfa Omega73% (22)
- Principio de Trabajo y EnergíaDocument4 paginiPrincipio de Trabajo y EnergíaJheison Eliacer Quispe HolguinÎncă nu există evaluări
- Beer Dinamica 9e Presentacion PPT c12Document38 paginiBeer Dinamica 9e Presentacion PPT c12Carlos Orley Gil Amaya100% (1)
- PDF Beer Dinamica 9e Presentacion PPT c15Document64 paginiPDF Beer Dinamica 9e Presentacion PPT c15Alberto Perdomo50% (2)
- RESISTENCIA DE MATERIALES: ENSAYOS Y DIAGRAMASDocument40 paginiRESISTENCIA DE MATERIALES: ENSAYOS Y DIAGRAMASRaul YaguÎncă nu există evaluări
- Cinematica Del Cuerpo RígidoDocument3 paginiCinematica Del Cuerpo Rígidocarlos carrizalesÎncă nu există evaluări
- Beer Dinamica 9e Presentacion PPT c14Document26 paginiBeer Dinamica 9e Presentacion PPT c14CarlosÎncă nu există evaluări
- Impulso y Cantidad de MovimientoDocument25 paginiImpulso y Cantidad de MovimientoMarina0% (2)
- Semana 14 Estatica Dinamica Componentes Tangencial y NormalDocument42 paginiSemana 14 Estatica Dinamica Componentes Tangencial y NormalJorge Rosas EL Imparable80% (20)
- Problemas NewtonDocument3 paginiProblemas NewtonJulian Mora Herrera0% (1)
- Solucionario de ShamesDocument62 paginiSolucionario de ShamesDei AsquiÎncă nu există evaluări
- 2 Descomposicion de Fuerzas en Tres DimensionesDocument5 pagini2 Descomposicion de Fuerzas en Tres DimensionesBrYan Cabrera33% (3)
- Vectores Problemas de FuerzasDocument2 paginiVectores Problemas de FuerzasdcadcÎncă nu există evaluări
- Capitulo12 Beer and JDocument20 paginiCapitulo12 Beer and JPedro RiveraÎncă nu există evaluări
- Grupo 13 PDFDocument19 paginiGrupo 13 PDFJAVQÎncă nu există evaluări
- Cantidad de Movimiento Angular de Una ParticulaDocument7 paginiCantidad de Movimiento Angular de Una Particuladzireyes94Încă nu există evaluări
- Equilibrio de ParticulaDocument12 paginiEquilibrio de ParticulaAlexis Joel Varela Flores0% (3)
- Resumen 5 Capitulo EntregarDocument3 paginiResumen 5 Capitulo EntregarGrecia Noguera100% (1)
- Estatica 2Document8 paginiEstatica 2Santiago VillegasÎncă nu există evaluări
- Ejercicios de Dinamica 57899fa279fe5 PDFDocument33 paginiEjercicios de Dinamica 57899fa279fe5 PDFJose Banda SamameÎncă nu există evaluări
- Mecanica Vectorial para Ingenieros Dinámica - Beer - 7edDocument622 paginiMecanica Vectorial para Ingenieros Dinámica - Beer - 7edMarcelo VissaniÎncă nu există evaluări
- Facultad de Ingenieria Civil: Sesion 12Document23 paginiFacultad de Ingenieria Civil: Sesion 12Rosa Elena Chero LecarnaqueÎncă nu există evaluări
- Maquinas y MecanismosDocument51 paginiMaquinas y MecanismosVeronica Ramirez BarronÎncă nu există evaluări
- Cinemática del cuerpo rígido: problemas resueltos de velocidad y aceleraciónDocument12 paginiCinemática del cuerpo rígido: problemas resueltos de velocidad y aceleraciónJeisson PachecoÎncă nu există evaluări
- Capitulo12 PDFDocument104 paginiCapitulo12 PDFErika TorresÎncă nu există evaluări
- Aplicaciones de Centroide Con IntegralesDocument2 paginiAplicaciones de Centroide Con IntegralesGerry Callata Chavarria100% (1)
- Sesión 7 - Cinemática Del Cuerpo RígidoDocument50 paginiSesión 7 - Cinemática Del Cuerpo RígidoJuan Solis Cerazo100% (1)
- Examenes de DinámicaDocument36 paginiExamenes de DinámicaCristhian Huamán Chávez80% (5)
- 5.3.2 Principio D - AlembertDocument8 pagini5.3.2 Principio D - AlembertChrisyova Rosend100% (1)
- Expresión Del Potencial Interno de Una Viga Sometida A Flexión SimpleDocument3 paginiExpresión Del Potencial Interno de Una Viga Sometida A Flexión Simplejo techÎncă nu există evaluări
- Cinemática de cuerpos rígidos en el planoDocument30 paginiCinemática de cuerpos rígidos en el planoJoselyn GissellÎncă nu există evaluări
- 1ra PC - TermoDocument4 pagini1ra PC - TermoRafaelÎncă nu există evaluări
- Problemas de Cinematica Cuerpo RigidoDocument63 paginiProblemas de Cinematica Cuerpo RigidoIbrahim Raouf HusseinÎncă nu există evaluări
- Primera Unidad Didáctica: Equilibrio: Docente: Mgt. Ing. Roger Quispe Dominguez Curso: Estática Semestre: 2022-1Document16 paginiPrimera Unidad Didáctica: Equilibrio: Docente: Mgt. Ing. Roger Quispe Dominguez Curso: Estática Semestre: 2022-1ALEJANDRO BENJAMIN SERRANO NAVARRETEÎncă nu există evaluări
- Ecuaciones Que de Nen La Cinemática Del Cuerpo RígidoDocument9 paginiEcuaciones Que de Nen La Cinemática Del Cuerpo RígidoTamix Gavito Hernandez100% (1)
- Dinamica EjerciciosDocument24 paginiDinamica EjerciciosJuan Alberto Mondaca FuentesÎncă nu există evaluări
- Dinámica de mecanismos y ejercicios de velocidad y aceleraciónDocument12 paginiDinámica de mecanismos y ejercicios de velocidad y aceleraciónEduardo CseÎncă nu există evaluări
- Leccion 1.5.1Document26 paginiLeccion 1.5.1asasasaÎncă nu există evaluări
- Metodo Del Trabajo Virtual - EjerciciosDocument7 paginiMetodo Del Trabajo Virtual - EjerciciosOliver Fernando Condori IlaquitaÎncă nu există evaluări
- Problemas de ComputadoraDocument12 paginiProblemas de ComputadoraGuivanni Alejandro Ramos CasalinsÎncă nu există evaluări
- 1) Notas Dinámica de Cuerpo RígidoDocument116 pagini1) Notas Dinámica de Cuerpo RígidoValee Aguilar BernalÎncă nu există evaluări
- Cinematica de Una ParticulaDocument152 paginiCinematica de Una ParticulaArmando GuzmanÎncă nu există evaluări
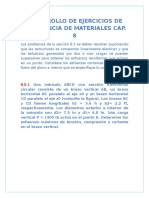
- Desarrollo de ejercicios de resistencia de materiales Cap. 8Document80 paginiDesarrollo de ejercicios de resistencia de materiales Cap. 8Caina SlothÎncă nu există evaluări
- DR Cinemática de La Partícula (Ecuación de Movimiento) PDFDocument5 paginiDR Cinemática de La Partícula (Ecuación de Movimiento) PDFCristopher Amir Hernandez AlvarezÎncă nu există evaluări
- 7ma - UND - CINÉTICA EN EL PLANO DE UN CUERPO RÍGIDO - TRABAJO Y ENERGÍADocument21 pagini7ma - UND - CINÉTICA EN EL PLANO DE UN CUERPO RÍGIDO - TRABAJO Y ENERGÍASebasAx24Încă nu există evaluări
- Capitulo12 Beer and JDocument40 paginiCapitulo12 Beer and JCRISTHIAN HUMBERTO FLORES MORALESÎncă nu există evaluări
- Beer Dinamica 9e Presentacion PPT c12Document38 paginiBeer Dinamica 9e Presentacion PPT c12Alejandro DamiánÎncă nu există evaluări
- Beer Dinamica 9e Presentacion PPT c12Document38 paginiBeer Dinamica 9e Presentacion PPT c12CarlosÎncă nu există evaluări
- Principio Del Trabajo y La Energía 3erDocument13 paginiPrincipio Del Trabajo y La Energía 3erGeorge PacaÎncă nu există evaluări
- DINAMICA CAp17 PDFDocument7 paginiDINAMICA CAp17 PDFdiegoÎncă nu există evaluări
- Dinámica de partículasDocument21 paginiDinámica de partículascristhian aaron vigo villarÎncă nu există evaluări
- 6 Met Energia Momentum Rig I DoDocument34 pagini6 Met Energia Momentum Rig I DoAlejandroÎncă nu există evaluări
- Dinamica Semana 5Document23 paginiDinamica Semana 5Luz de Fatima Carranza GamboaÎncă nu există evaluări
- Trabajo y EnergiaDocument43 paginiTrabajo y EnergiaJunge AkademischÎncă nu există evaluări
- Trabajo y EnergíaDocument27 paginiTrabajo y EnergíaJohana Valeria Sánchez Yahuarcani100% (1)
- Unidad 14Document22 paginiUnidad 14SÎncă nu există evaluări
- CH16Document39 paginiCH16Molina GabrielaÎncă nu există evaluări
- Metodología de proyecto sismorresistente de edificiosDe la EverandMetodología de proyecto sismorresistente de edificiosEvaluare: 5 din 5 stele5/5 (1)
- Básicas de La ProductividadDocument10 paginiBásicas de La ProductividadCarlosÎncă nu există evaluări
- Guia RiesgosPsicosociales MadridDocument18 paginiGuia RiesgosPsicosociales MadridbarzanaÎncă nu există evaluări
- Crystal Reports ActiveX Designer - FormulaPolinomicaDocument1 paginăCrystal Reports ActiveX Designer - FormulaPolinomicaCarlosÎncă nu există evaluări
- Precioparticularinsumotipov SaneamientoDocument2 paginiPrecioparticularinsumotipov SaneamientoCarlosÎncă nu există evaluări
- Memoria de Calculo UbsDocument4 paginiMemoria de Calculo UbsCarlosÎncă nu există evaluări
- Análisis de precios unitarios de servicios de sistema de agua potableDocument68 paginiAnálisis de precios unitarios de servicios de sistema de agua potableCarlosÎncă nu există evaluări
- Ficha Tecnica 11 AbrilDocument2 paginiFicha Tecnica 11 AbrilCarlosÎncă nu există evaluări
- Manifestación Omar QuerevalúDocument1 paginăManifestación Omar QuerevalúCarlosÎncă nu există evaluări
- A. Intranet Del Banco de Proyectos - Ficha de RegistroDocument11 paginiA. Intranet Del Banco de Proyectos - Ficha de RegistroCarlosÎncă nu există evaluări
- Kaisen - La Mejora ContinuaDocument38 paginiKaisen - La Mejora ContinuaQuique IslasÎncă nu există evaluări
- Lomo Archivador UltimoDocument2 paginiLomo Archivador UltimoCarlosÎncă nu există evaluări
- Planificación de Capacidades y Problemas de Productividad CoDocument6 paginiPlanificación de Capacidades y Problemas de Productividad CoCarlosÎncă nu există evaluări
- Manifestación Roy ArevaloDocument1 paginăManifestación Roy ArevaloCarlosÎncă nu există evaluări
- Anexo 13 Alerta de Seguridad Accidente Leve - 27.01.12Document1 paginăAnexo 13 Alerta de Seguridad Accidente Leve - 27.01.12CarlosÎncă nu există evaluări
- OT 65076904 InspgrietascercanasCellarCash3 2009Document5 paginiOT 65076904 InspgrietascercanasCellarCash3 2009CarlosÎncă nu există evaluări
- Presentación PPC - Acc. Leve WG 27.01.12Document4 paginiPresentación PPC - Acc. Leve WG 27.01.12CarlosÎncă nu există evaluări
- ProductividadDocument5 paginiProductividadCarlos Cersar Urbian GarciaÎncă nu există evaluări
- DailethDocument4 paginiDailethCarlosÎncă nu există evaluări
- La Mejora Continua A Través Del Programa Permanente de MejorDocument9 paginiLa Mejora Continua A Través Del Programa Permanente de MejorCarlosÎncă nu există evaluări
- DISEÑO DE MURO DE CONTENCION Eje A y F. MarcoDocument4 paginiDISEÑO DE MURO DE CONTENCION Eje A y F. MarcoCarlosÎncă nu există evaluări
- N - Doc:: Revision: Proceso: PaginasDocument1 paginăN - Doc:: Revision: Proceso: PaginasCarlosÎncă nu există evaluări
- INFORME OT 64585112: N - Doc: Revision: Proceso: Paginas: 1-1Document1 paginăINFORME OT 64585112: N - Doc: Revision: Proceso: Paginas: 1-1CarlosÎncă nu există evaluări
- Presentación ReducidaDocument11 paginiPresentación ReducidaCarlosÎncă nu există evaluări
- Cada MartesDocument1 paginăCada MartesCarlosÎncă nu există evaluări
- 001-Con Plus 14Document2 pagini001-Con Plus 14CarlosÎncă nu există evaluări
- Alerta de Seguridad - Retiro de PlatoDocument2 paginiAlerta de Seguridad - Retiro de PlatoCarlosÎncă nu există evaluări
- Observaciones PlantasDocument1 paginăObservaciones PlantasCarlosÎncă nu există evaluări
- Contabilidad UNSA-Carlos MuñozDocument14 paginiContabilidad UNSA-Carlos MuñozCarlosÎncă nu există evaluări
- La EmpresaDocument9 paginiLa EmpresaCarlosÎncă nu există evaluări
- Contabilidad UNSA-Carlos MuñozDocument14 paginiContabilidad UNSA-Carlos MuñozCarlosÎncă nu există evaluări
- Apuntes de Electrotecnia Cap2 "Resistencia Electrica"Document8 paginiApuntes de Electrotecnia Cap2 "Resistencia Electrica"Maria Cecilia Suarez RubiÎncă nu există evaluări
- Autoevaluación 1 - MECANICA DE FLUIDOS (11721)Document7 paginiAutoevaluación 1 - MECANICA DE FLUIDOS (11721)Elias QcheÎncă nu există evaluări
- 1.01-Campo de Cargas Puntuales (I)Document2 pagini1.01-Campo de Cargas Puntuales (I)Camila MonforteÎncă nu există evaluări
- Termo Final EjerDocument3 paginiTermo Final EjerJHON WILSON CUSI LUQUEÎncă nu există evaluări
- Hoja 38 Punto Nodal SolucionDocument4 paginiHoja 38 Punto Nodal SolucionZacarias FloresÎncă nu există evaluări
- 1-Introducción Física de Semiconductores PDFDocument16 pagini1-Introducción Física de Semiconductores PDFJefferson PerezÎncă nu există evaluări
- La Medida en F¡sicaDocument40 paginiLa Medida en F¡sicaEmerson MuñozÎncă nu există evaluări
- PROB FIS Parte3 ActualizadoDocument40 paginiPROB FIS Parte3 ActualizadoSAMUEL AGUILAR ANDIA100% (3)
- FORMATO-LBOTA Editado #7Document11 paginiFORMATO-LBOTA Editado #7Pechurrumin GuerraÎncă nu există evaluări
- Análisis de Relaciones Escalares y ComplejasDocument10 paginiAnálisis de Relaciones Escalares y ComplejasNando NandoÎncă nu există evaluări
- Cinematica Dinamica GravitacionDocument21 paginiCinematica Dinamica GravitacionRUBENÎncă nu există evaluări
- Trabajo Final Caf 2Document8 paginiTrabajo Final Caf 2Frank Ludwind Camposano BerrospiÎncă nu există evaluări
- Ctos Maq Elect Pract 03 AlumnosDocument7 paginiCtos Maq Elect Pract 03 AlumnosEduardo Ortiz GarciaÎncă nu există evaluări
- Tema 513Document2 paginiTema 513Ana TudelaÎncă nu există evaluări
- Copia 1 de Unidad I Temperatura y CalorDocument132 paginiCopia 1 de Unidad I Temperatura y CalorLevi Alberto Arteaga Villegas100% (1)
- La Ley de FarayDocument2 paginiLa Ley de FarayYampier Fuentes SullcaÎncă nu există evaluări
- Ejercicios Tema 4Document4 paginiEjercicios Tema 4Sara AlfoceaÎncă nu există evaluări
- Platos de Casquete de Burbujeo PDFDocument45 paginiPlatos de Casquete de Burbujeo PDFRoger Guanipa67% (3)
- Tarea Segundo DepartamentalDocument21 paginiTarea Segundo DepartamentalREYES MONTES IBRAHIMÎncă nu există evaluări
- Clase Practica 1 - Dayana FloresDocument11 paginiClase Practica 1 - Dayana FloresPame FloresÎncă nu există evaluări
- Fisica 2020CDocument3 paginiFisica 2020CHector GonzalesÎncă nu există evaluări
- Cálculo potencia alterna circuitos trifásicosDocument8 paginiCálculo potencia alterna circuitos trifásicosalejandroÎncă nu există evaluări
- Aplicaciones físicas de la integral definidaDocument4 paginiAplicaciones físicas de la integral definidanelson_grandeÎncă nu există evaluări
- Practica 6Document2 paginiPractica 6NathanCerrograndeÎncă nu există evaluări
- Tema - 01 - Fisica Del SonidoDocument18 paginiTema - 01 - Fisica Del SonidoDustin SantanderÎncă nu există evaluări
- Guia 1 - Parcial Fisica IIIDocument10 paginiGuia 1 - Parcial Fisica IIIBreNda Takeshi0% (1)
- Hidrostatica e Hidrodinamica PDFDocument51 paginiHidrostatica e Hidrodinamica PDFFranklin Briceño Caballero100% (3)
- Reporte Practica 4 FinalDocument6 paginiReporte Practica 4 FinalMadeleine FloresÎncă nu există evaluări
- Lista de Precios Electrical Products FY23: Descubre El Mundo EpDocument64 paginiLista de Precios Electrical Products FY23: Descubre El Mundo EpCoronelÎncă nu există evaluări