S-ar putea să vă placă și
- Engranajes - Esfuerzos TrenesDocument25 paginiEngranajes - Esfuerzos Trenestumadre9692746Încă nu există evaluări
- Engranajes cónicos de 90Document14 paginiEngranajes cónicos de 90MiguelRodriguezCalderonÎncă nu există evaluări
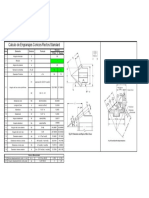
- Cálculo de engranajes cónicos rectos estándarDocument1 paginăCálculo de engranajes cónicos rectos estándardeliaabreguÎncă nu există evaluări
- Cálculo de elementos de engranajes cónicos métricosDocument5 paginiCálculo de elementos de engranajes cónicos métricosMarcos GarciaÎncă nu există evaluări
- Ficha #1 - Torno TRAVIS T-1640 PDFDocument1 paginăFicha #1 - Torno TRAVIS T-1640 PDFjulio fernando sanchezÎncă nu există evaluări
- Engranajes RectosDocument5 paginiEngranajes RectosJuan SejasÎncă nu există evaluări
- Dimensionamiento de Chavetas (Elementos)Document3 paginiDimensionamiento de Chavetas (Elementos)Pedro RiveroÎncă nu există evaluări
- Calculos Despulpadora de FrutasDocument36 paginiCalculos Despulpadora de FrutasJoseLuisRodriguezMirandaÎncă nu există evaluări
- Asignación3 Capítulo12Document11 paginiAsignación3 Capítulo12Roxangel AdamesÎncă nu există evaluări
- Cabezal Bifurcado Vistas FINAL IMPRIMIR PDFDocument1 paginăCabezal Bifurcado Vistas FINAL IMPRIMIR PDFAdrián MaldonadoÎncă nu există evaluări
- Conos1El Calculo de ConicidadesDocument4 paginiConos1El Calculo de ConicidadesCristal MuranoÎncă nu există evaluări
- Examen Final 24-Julio-2009 Procesos IDocument9 paginiExamen Final 24-Julio-2009 Procesos ILau MarcÎncă nu există evaluări
- CALCULOSDocument6 paginiCALCULOSfernando villamizar paradaÎncă nu există evaluări
- Tabla de Engranajes Norma Agma 2016Document19 paginiTabla de Engranajes Norma Agma 2016Luis Frank NB100% (1)
- Hoja de Procesos Tornillo Sin FinDocument8 paginiHoja de Procesos Tornillo Sin FinRodrigo ChuraÎncă nu există evaluări
- Marco Teórico BOMBASDocument8 paginiMarco Teórico BOMBASbetancur970929Încă nu există evaluări
- Cálculo fuerza troquelado acero 1010 pieza D=50mm d=20mmDocument2 paginiCálculo fuerza troquelado acero 1010 pieza D=50mm d=20mmkÎncă nu există evaluări
- Formulario de Elementos de MaquinasDocument9 paginiFormulario de Elementos de MaquinasSERGIO_MANÎncă nu există evaluări
- Diseño Y Fabricacion de Un Engranaje de Dientes RectosDocument12 paginiDiseño Y Fabricacion de Un Engranaje de Dientes RectosViktor Martinez50% (2)
- Tabla de Velocidad de CorteDocument5 paginiTabla de Velocidad de CorteAntonio DelgadoÎncă nu există evaluări
- Hoja de Procesos HelicoidalesDocument10 paginiHoja de Procesos HelicoidalesBryan ST100% (1)
- Hoja de Procesos FinalizadoDocument27 paginiHoja de Procesos FinalizadoGary TitoÎncă nu există evaluări
- Ensayo N1 Reconocimiento de MaterialesDocument24 paginiEnsayo N1 Reconocimiento de MaterialesAlvaro AlvaÎncă nu există evaluări
- 1 Ejercicio Engranajes CorregidosDocument2 pagini1 Ejercicio Engranajes CorregidosBenjamin OsccoÎncă nu există evaluări
- Tapia 4716 E1Document2 paginiTapia 4716 E1Maria JoseÎncă nu există evaluări
- Tallado Engranaje HelicoidalDocument3 paginiTallado Engranaje HelicoidalRoberto Sanchez Rodriguez100% (1)
- Practico 9 Problemas de Mecanizado TorneadoDocument10 paginiPractico 9 Problemas de Mecanizado Torneadoalejandro cuellarÎncă nu există evaluări
- Elaboracion de Noyos Informe 4Document14 paginiElaboracion de Noyos Informe 4Ariel DíazÎncă nu există evaluări
- Cap 22 Oper. de MecanizadoDocument37 paginiCap 22 Oper. de MecanizadoGilbert Peña100% (1)
- Problemas11 15Document7 paginiProblemas11 15AYQUIPA ROSAS JESUS FRANCISCOÎncă nu există evaluări
- Tipos de RoscasDocument45 paginiTipos de RoscasHugo AngamarcaÎncă nu există evaluări
- Tallado de EngranajesDocument24 paginiTallado de EngranajesHector Jose Serrano CastillejoÎncă nu există evaluări
- Problemas Resueltos de FresadoDocument10 paginiProblemas Resueltos de Fresadomaribel espinozaÎncă nu există evaluări
- Deber Torno 201720Document4 paginiDeber Torno 201720Carlos Alberto Andrade Naranjo100% (1)
- EngranajesDocument11 paginiEngranajesRicardo CampoÎncă nu există evaluări
- 8 Ciclos FrigorificosDocument41 pagini8 Ciclos FrigorificosLucianoBressi100% (1)
- Calculos Tornillos para ChumacerasDocument22 paginiCalculos Tornillos para ChumacerasCesar Adel Hernandez LopezÎncă nu există evaluări
- Engranajes Cónicos de Dientes Rectos (Document27 paginiEngranajes Cónicos de Dientes Rectos (dilalo9501100% (4)
- Mecanizado de ArbolesDocument5 paginiMecanizado de ArbolesidexchimbiteÎncă nu există evaluări
- Caja NortonDocument5 paginiCaja NortonJosé E. MartínezÎncă nu există evaluări
- Geometria de FiloDocument3 paginiGeometria de Filoco-ka06Încă nu există evaluări
- Compactadora de Ladrillos2018Document106 paginiCompactadora de Ladrillos2018Jorge Ayle AlexanderÎncă nu există evaluări
- Diseño molino granos caja reductoraDocument26 paginiDiseño molino granos caja reductoraJhon Franco0% (1)
- Ejercicios MecanizadoDocument49 paginiEjercicios Mecanizadolucian0sebastian0par100% (1)
- TORNO Velocidad J Avance y Profundidad de CorteDocument17 paginiTORNO Velocidad J Avance y Profundidad de CorteRicardo Maldonado100% (1)
- Solidos en 3dDocument28 paginiSolidos en 3dJose Coral Montes100% (1)
- Engranajes cilíndricos: geometría y cálculoDocument4 paginiEngranajes cilíndricos: geometría y cálculoFabri GavilanezÎncă nu există evaluări
- El Taladro PDFDocument67 paginiEl Taladro PDFFelix Gutierrez VdglÎncă nu există evaluări
- Informe EngranajeDocument6 paginiInforme EngranajeBrenda LuciaÎncă nu există evaluări
- Ejercicio Combinados de MecanizadosDocument8 paginiEjercicio Combinados de MecanizadosLaura Emperatriz Coque GallegosÎncă nu există evaluări
- Calculo y Seleccion de CadenaDocument3 paginiCalculo y Seleccion de CadenaMigger Micky Copajira XDÎncă nu există evaluări
- 4a-Equivalencias de MecanismosDocument8 pagini4a-Equivalencias de MecanismosEdwin Abregú LeandroÎncă nu există evaluări
- Dibujo de engranajes cónicos con Solid EdgeDocument7 paginiDibujo de engranajes cónicos con Solid EdgeoycohawkÎncă nu există evaluări
- Calculo de Corona Sin Fin de Doble EntradaDocument24 paginiCalculo de Corona Sin Fin de Doble EntradaJesus CesarÎncă nu există evaluări
- Cabezal universal divisor: funciones y métodos de aplicaciónDocument10 paginiCabezal universal divisor: funciones y métodos de aplicaciónJose BallesterÎncă nu există evaluări
- CONICOSDocument9 paginiCONICOSAlejandro MondraÎncă nu există evaluări
- Formula EgranageDocument5 paginiFormula EgranageERNESTO GARCÍA VÁZQUEZÎncă nu există evaluări
- Formulario para El Calculo de Piñones CónicosDocument1 paginăFormulario para El Calculo de Piñones CónicosJavierÎncă nu există evaluări
- ConicosDocument6 paginiConicosAlexMiguelÎncă nu există evaluări
- Calculos Engranajes ConicosDocument9 paginiCalculos Engranajes ConicosLeandro Ortiz TabaresÎncă nu există evaluări
- Tif Realidad Nacional PDFDocument20 paginiTif Realidad Nacional PDFguidoÎncă nu există evaluări
- Detraccion de Cargo Steel TradeDocument1 paginăDetraccion de Cargo Steel TradeguidoÎncă nu există evaluări
- Informe MDLDocument2 paginiInforme MDLguidoÎncă nu există evaluări
- Guia CondensadorDocument5 paginiGuia CondensadorguidoÎncă nu există evaluări
- Delito de EstafaDocument2 paginiDelito de EstafaguidoÎncă nu există evaluări
- Práctica DirigidaDocument1 paginăPráctica DirigidaguidoÎncă nu există evaluări
- Queja #1Document2 paginiQueja #1guidoÎncă nu există evaluări
- Tipos de NacionalismoDocument3 paginiTipos de NacionalismoguidoÎncă nu există evaluări
- Tributario 15 10 2020Document7 paginiTributario 15 10 2020guidoÎncă nu există evaluări
- Orden de Carga SionDocument1 paginăOrden de Carga SionguidoÎncă nu există evaluări
- QUEJAS y DENUNCIASDocument14 paginiQUEJAS y DENUNCIASguidoÎncă nu există evaluări
- Teoría Del Caso Penalll 2018Document3 paginiTeoría Del Caso Penalll 2018guidoÎncă nu există evaluări
- SUMILLADocument2 paginiSUMILLAguidoÎncă nu există evaluări
- Investigacion Formativa Fisica (Actualizado)Document8 paginiInvestigacion Formativa Fisica (Actualizado)guidoÎncă nu există evaluări
- Diagrama de Flujo Prácticas Tecsup 2018Document1 paginăDiagrama de Flujo Prácticas Tecsup 2018guidoÎncă nu există evaluări
- Instructivo Trabajo de Campo SDS VI 2018-2 PDFDocument4 paginiInstructivo Trabajo de Campo SDS VI 2018-2 PDFguidoÎncă nu există evaluări
- Sin TítuloDocument41 paginiSin TítuloguidoÎncă nu există evaluări
- Acuerdo PlenarioDocument2 paginiAcuerdo PlenarioguidoÎncă nu există evaluări
- Sesión 3Document33 paginiSesión 3guidoÎncă nu există evaluări
- FfacturaDocument1 paginăFfacturaguidoÎncă nu există evaluări
- Presentación1 Familia CorreccionDocument4 paginiPresentación1 Familia CorreccionguidoÎncă nu există evaluări
- Constancia 8Document1 paginăConstancia 8guidoÎncă nu există evaluări
- 1ra Actividad Práctica c3 CDDocument2 pagini1ra Actividad Práctica c3 CDguidoÎncă nu există evaluări
- FfacturaDocument1 paginăFfacturaguidoÎncă nu există evaluări
- Tia PortalDocument16 paginiTia Portalguido50% (2)
- LAB 5 Soldadura-1Document24 paginiLAB 5 Soldadura-1guidoÎncă nu există evaluări
- LAB 5 Soldadura-1Document24 paginiLAB 5 Soldadura-1guidoÎncă nu există evaluări
- Programacion Motor Paso A PasoDocument4 paginiProgramacion Motor Paso A PasoguidoÎncă nu există evaluări
- Denuncia grave faltaDocument14 paginiDenuncia grave faltaguidoÎncă nu există evaluări
- Colocar Tacómetro A Fiat PalioDocument4 paginiColocar Tacómetro A Fiat PalioJulio NuñezÎncă nu există evaluări
- IntructivoProcesos Gerenciales IngetecDocument95 paginiIntructivoProcesos Gerenciales Ingetecnathalia giraldoÎncă nu există evaluări
- Qué Es La GenéticaDocument2 paginiQué Es La GenéticaLodis Yiceth Cabrera MoreloÎncă nu există evaluări
- Geografia Como Comentar Un Mapa PDFDocument6 paginiGeografia Como Comentar Un Mapa PDFRuben MCÎncă nu există evaluări
- Capítulo 2. Marco Teórico y Estado Del Arte: Fisura Piel de CocodriloDocument1 paginăCapítulo 2. Marco Teórico y Estado Del Arte: Fisura Piel de CocodriloJhovany Quispe BustincioÎncă nu există evaluări
- Cuadro Sinóptico en BlancoDocument1 paginăCuadro Sinóptico en BlancoCARLOS DE DIEGO MOSQUERAÎncă nu există evaluări
- Análisis Del Escenario Del ProblemaDocument11 paginiAnálisis Del Escenario Del ProblemaBellaNavarroÎncă nu există evaluări
- Pasos para Realizar Un VasófonosDocument3 paginiPasos para Realizar Un VasófonosmaribelÎncă nu există evaluări
- Cengel Capitulo+7Document48 paginiCengel Capitulo+7VDÎncă nu există evaluări
- Resolución Expresión BooleanaDocument2 paginiResolución Expresión BooleanaserolfitnasÎncă nu există evaluări
- PRACTICAS LIBRO DE LETRAS COMPLETO OK-with-numbers PDFDocument230 paginiPRACTICAS LIBRO DE LETRAS COMPLETO OK-with-numbers PDFTaryÎncă nu există evaluări
- Cómo las ciudades se vuelven más inteligentes con Big DataDocument3 paginiCómo las ciudades se vuelven más inteligentes con Big DataJuan Pablo Paredes HernaniÎncă nu există evaluări
- Fracturas Costales y FX de CaderaDocument56 paginiFracturas Costales y FX de CaderaXto Nuestra PazÎncă nu există evaluări
- Potencial de la piscicultura en BoliviaDocument29 paginiPotencial de la piscicultura en BoliviaNen EcoÎncă nu există evaluări
- Un Gato Construye Una FamiliaDocument89 paginiUn Gato Construye Una FamiliaMika BrightÎncă nu există evaluări
- Curiosidades Del Mes de DiciembreDocument2 paginiCuriosidades Del Mes de Diciembremelissa100% (1)
- Orígenes coloniales del puerto de BuenaventuraDocument27 paginiOrígenes coloniales del puerto de BuenaventuraMaría Del Carmen Muñoz Millán100% (1)
- Formatos 1Document178 paginiFormatos 1Elvis DiazÎncă nu există evaluări
- UjjjjhjhjkghjkDocument10 paginiUjjjjhjhjkghjkDiego Alexander Flores OtosÎncă nu există evaluări
- Transito HidrogramasDocument10 paginiTransito HidrogramasLuis Cueva PeralesÎncă nu există evaluări
- Ensayo ColisionesDocument3 paginiEnsayo ColisionesCamilo RodriguezÎncă nu există evaluări
- Micotoxinas en AlimentosDocument7 paginiMicotoxinas en AlimentosYefri Samir Navarro JuarezÎncă nu există evaluări
- Foro Calificado-1 Los Sofware 3D Mas Usados en La Industria-Pc3Document3 paginiForo Calificado-1 Los Sofware 3D Mas Usados en La Industria-Pc3Brian Alata FloresÎncă nu există evaluări
- Ou 2Document177 paginiOu 2Willy Ciprian PuenteÎncă nu există evaluări
- Resumen de La Dieta WWDocument33 paginiResumen de La Dieta WWMarta Perpiñán0% (1)
- Linea de TiempoDocument3 paginiLinea de TiempoSol Escobar 68657119Încă nu există evaluări
- Administracion de MantenimientoDocument86 paginiAdministracion de MantenimientoIan Raúl Izquierdo RamónÎncă nu există evaluări
- Fracturas Del Cartílago de CrecimientoDocument2 paginiFracturas Del Cartílago de CrecimientoArantzaÎncă nu există evaluări
- LoxoscelismoDocument10 paginiLoxoscelismoVG GabrielÎncă nu există evaluări
- Gland UlasDocument21 paginiGland UlasGabriel Maximiliano Flores MamanilloÎncă nu există evaluări