S-ar putea să vă placă și
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2De la EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Încă nu există evaluări
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1De la EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Evaluare: 2.5 din 5 stele2.5/5 (3)
- Sabian Aspect OrbsDocument8 paginiSabian Aspect Orbsellaella13100% (2)
- 300 Process ControlDocument23 pagini300 Process ControlMuhammad Ibad AlamÎncă nu există evaluări
- Things To Think About Ch.13 (Process Control A)Document21 paginiThings To Think About Ch.13 (Process Control A)Salsa NisaÎncă nu există evaluări
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetDe la EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetÎncă nu există evaluări
- Unit 1 Control SystemDocument86 paginiUnit 1 Control SystemVijay Ct67% (3)
- JUnit 5 User GuideDocument90 paginiJUnit 5 User GuideaawaakÎncă nu există evaluări
- SDS ERSA Rev 0Document156 paginiSDS ERSA Rev 0EdgarVelosoCastroÎncă nu există evaluări
- Control SystemDocument179 paginiControl Systemgurudatha26583% (6)
- PNEUMATICS AND AIR CIRCUITS UNDERSTANDING THE CASCADE VALVE AND PLC UNDERSTANDINGDe la EverandPNEUMATICS AND AIR CIRCUITS UNDERSTANDING THE CASCADE VALVE AND PLC UNDERSTANDINGÎncă nu există evaluări
- Bms For HvacDocument63 paginiBms For HvacWasantha Jayarathna100% (1)
- Instrumentation Positioner PresentationDocument43 paginiInstrumentation Positioner PresentationSangram Patnaik100% (1)
- It Is The Automatic Control of An Output Variable by Sensing The Amplitude of The OutputDocument55 paginiIt Is The Automatic Control of An Output Variable by Sensing The Amplitude of The OutputSobhan Pattanaik100% (1)
- Hyperbolic SystemsDocument21 paginiHyperbolic SystemsPrincess CutabÎncă nu există evaluări
- Control of DC Motor Using Different Control StrategiesDe la EverandControl of DC Motor Using Different Control StrategiesÎncă nu există evaluări
- Modern Construction HandbookDocument498 paginiModern Construction HandbookRui Sousa100% (3)
- Automatic Controllers & Control ModesDocument74 paginiAutomatic Controllers & Control ModesVishal IyerÎncă nu există evaluări
- W7ADocument15 paginiW7AShujah RashidÎncă nu există evaluări
- Lab Report CompleteDocument30 paginiLab Report Completefahadfiaz0% (1)
- Chapter I Auto RegDocument25 paginiChapter I Auto RegLokman DridahÎncă nu există evaluări
- Lab Manual - Control System EngineeringDocument39 paginiLab Manual - Control System Engineeringvineetanishad50% (2)
- BMCS Lab 1Document7 paginiBMCS Lab 1Sameera WaseemÎncă nu există evaluări
- What Is Sequence and Logic Control?Document6 paginiWhat Is Sequence and Logic Control?Marwan ShamsÎncă nu există evaluări
- Electrical Control and Power LaboratoryDocument79 paginiElectrical Control and Power LaboratoryMerera TaresaÎncă nu există evaluări
- Chapter10 (Governors)Document10 paginiChapter10 (Governors)Zohaib Anser100% (1)
- DDCDocument22 paginiDDCBala SrivasÎncă nu există evaluări
- Control DynamicDocument10 paginiControl Dynamicكرار نعيم100% (1)
- Control Systems Unit I NotesDocument55 paginiControl Systems Unit I NotesShabbir AliÎncă nu există evaluări
- PROCON Student ManualDocument48 paginiPROCON Student ManualPaul100% (1)
- 000 Digital Control LecturesDocument67 pagini000 Digital Control LecturesPX PRÎncă nu există evaluări
- Lecture 1Document26 paginiLecture 1ahmedelebyaryÎncă nu există evaluări
- Process - Control SimulatorDocument7 paginiProcess - Control SimulatorSakshi RajputÎncă nu există evaluări
- Ducment 1 ReaserchDocument41 paginiDucment 1 ReaserchAbubaker MuzayinÎncă nu există evaluări
- On Off Level Control ProcessDocument16 paginiOn Off Level Control ProcessAndrew NabilÎncă nu există evaluări
- Automatic Motor Start/stop: Temperature ControlDocument19 paginiAutomatic Motor Start/stop: Temperature ControlNathaniel ConiseÎncă nu există evaluări
- ECNG3004 Control System ApplicationsDocument7 paginiECNG3004 Control System ApplicationsMarlon BoucaudÎncă nu există evaluări
- Fundamentals of Controls System Group 1Document17 paginiFundamentals of Controls System Group 1Louie CamposÎncă nu există evaluări
- PID Short QuestionsDocument3 paginiPID Short Questions66umer66Încă nu există evaluări
- Basic Control LoopsDocument6 paginiBasic Control Loopssushant_jhawerÎncă nu există evaluări
- AIS AnswersDocument37 paginiAIS AnswersSanatan DharmaÎncă nu există evaluări
- Chapter 1Document22 paginiChapter 1Anonymous AFFiZnÎncă nu există evaluări
- General: P - A - R - TCDocument18 paginiGeneral: P - A - R - TCMohamed MosaedÎncă nu există evaluări
- Control System NotesDocument179 paginiControl System NotesChandrashekarÎncă nu există evaluări
- Automatic Controllers: Control ActionsDocument3 paginiAutomatic Controllers: Control ActionsRakeeb BalochÎncă nu există evaluări
- Introduction To Direct Digital Control Systems: Purpose of This GuideDocument82 paginiIntroduction To Direct Digital Control Systems: Purpose of This GuidekdpmansiÎncă nu există evaluări
- Ce Mod1Document22 paginiCe Mod1AYUSH CHANDRAÎncă nu există evaluări
- Chap1 Indus ElectronicsDocument47 paginiChap1 Indus ElectronicsSantosh Kumar BejugamÎncă nu există evaluări
- Laftah/15/ Azeez (HusseinDocument17 paginiLaftah/15/ Azeez (HusseinHadi. MÎncă nu există evaluări
- Capitulo 1Document29 paginiCapitulo 1Ramón AlvaradoÎncă nu există evaluări
- F001 AtosDocument2 paginiF001 Atoschandushar1604Încă nu există evaluări
- Control Systems Overview Professor GopalankrishnaDocument23 paginiControl Systems Overview Professor GopalankrishnaJameÎncă nu există evaluări
- Text Book of Mechatronics Foe MG University StudentssDocument99 paginiText Book of Mechatronics Foe MG University StudentssBASIL BENNY100% (1)
- Control SystemDocument183 paginiControl Systemsantoshgowda8Încă nu există evaluări
- Electrohydraulic Proportional Controls: User's Guidelines: A Due Stadi, Pilotate, Dimensioni ISO/Cetop 07 e 08Document5 paginiElectrohydraulic Proportional Controls: User's Guidelines: A Due Stadi, Pilotate, Dimensioni ISO/Cetop 07 e 08haggÎncă nu există evaluări
- Air-Conditioning and Refrigeration Control - 1: Instructor: Eng. Raad Alsaleh Grading SystemDocument92 paginiAir-Conditioning and Refrigeration Control - 1: Instructor: Eng. Raad Alsaleh Grading SystemSunil Varma VeeravalliÎncă nu există evaluări
- Tee 422 Lec-1Document51 paginiTee 422 Lec-1REJAY89Încă nu există evaluări
- Pid EeeeDocument28 paginiPid Eeeecyprian obotaÎncă nu există evaluări
- Instruction Manual: Basic Feedback TrainerDocument3 paginiInstruction Manual: Basic Feedback TrainernileshsawÎncă nu există evaluări
- Water Flow Control System V2 PDFDocument12 paginiWater Flow Control System V2 PDFAayushSrivastava100% (1)
- 270 EHC Sec 2a EHC Actuators and ValvesDocument19 pagini270 EHC Sec 2a EHC Actuators and Valvesmendel Santa Fe ArenasÎncă nu există evaluări
- Electrical Correcting Elements in Automatic Control and Regulation CircuitsDe la EverandElectrical Correcting Elements in Automatic Control and Regulation CircuitsÎncă nu există evaluări
- Simulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorDe la EverandSimulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorÎncă nu există evaluări
- Reporter: John Alvin B. SerenioDocument25 paginiReporter: John Alvin B. SerenioPrincess CutabÎncă nu există evaluări
- Action ResearchDocument15 paginiAction ResearchPrincess CutabÎncă nu există evaluări
- Chat 6 SummaryDocument2 paginiChat 6 SummaryPrincess CutabÎncă nu există evaluări
- Tuning-Ryan and AlexDocument21 paginiTuning-Ryan and AlexPrincess CutabÎncă nu există evaluări
- Pid Limitations & Application by PrincessDocument24 paginiPid Limitations & Application by PrincessPrincess CutabÎncă nu există evaluări
- Spectroscopic Methods For Determination of DexketoprofenDocument8 paginiSpectroscopic Methods For Determination of DexketoprofenManuel VanegasÎncă nu există evaluări
- CL Honours Report NamanDocument11 paginiCL Honours Report NamanNaman VermaÎncă nu există evaluări
- Intelligent Status Monitoring System For Port Machinery: RMGC/RTGCDocument2 paginiIntelligent Status Monitoring System For Port Machinery: RMGC/RTGCfatsahÎncă nu există evaluări
- MSDS Buffer Solution PH 4.0Document5 paginiMSDS Buffer Solution PH 4.0Ardhy LazuardyÎncă nu există evaluări
- For Accuracy and Safety: Globally ApprovedDocument4 paginiFor Accuracy and Safety: Globally ApprovedPedro LopesÎncă nu există evaluări
- TIA Guidelines SingaporeDocument24 paginiTIA Guidelines SingaporeTahmidSaanidÎncă nu există evaluări
- CE162P MODULE 2 LECTURE 4 Analysis & Design of Mat FoundationDocument32 paginiCE162P MODULE 2 LECTURE 4 Analysis & Design of Mat FoundationPROSPEROUS LUCKILYÎncă nu există evaluări
- Clustering Menggunakan Metode K-Means Untuk Menentukan Status Gizi BalitaDocument18 paginiClustering Menggunakan Metode K-Means Untuk Menentukan Status Gizi BalitaAji LaksonoÎncă nu există evaluări
- Sony x300 ManualDocument8 paginiSony x300 ManualMarcosCanforaÎncă nu există evaluări
- Fundasurv 215 Plate 1mDocument3 paginiFundasurv 215 Plate 1mKeith AtencioÎncă nu există evaluări
- 7 - Monte-Carlo-Simulation With XL STAT - English GuidelineDocument8 pagini7 - Monte-Carlo-Simulation With XL STAT - English GuidelineGauravShelkeÎncă nu există evaluări
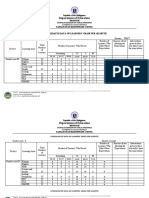
- Department of Education: Consolidated Data On Learners' Grade Per QuarterDocument4 paginiDepartment of Education: Consolidated Data On Learners' Grade Per QuarterUsagi HamadaÎncă nu există evaluări
- 06 SAP PM Level 1 Role Matrix Template SampleDocument5 pagini06 SAP PM Level 1 Role Matrix Template SampleRiteshSinhmar100% (1)
- Digital Systems Project: IITB CPUDocument7 paginiDigital Systems Project: IITB CPUAnoushka DeyÎncă nu există evaluări
- Principled Instructions Are All You Need For Questioning LLaMA-1/2, GPT-3.5/4Document24 paginiPrincipled Instructions Are All You Need For Questioning LLaMA-1/2, GPT-3.5/4Jeremias GordonÎncă nu există evaluări
- Tribes Without RulersDocument25 paginiTribes Without Rulersgulistan.alpaslan8134100% (1)
- Unit 2: Air Intake and Exhaust SystemsDocument10 paginiUnit 2: Air Intake and Exhaust SystemsMahmmod Al-QawasmehÎncă nu există evaluări
- Design ProjectDocument60 paginiDesign Projectmahesh warÎncă nu există evaluări
- Section 1 Company Overview StandardsDocument34 paginiSection 1 Company Overview StandardsChris MedeirosÎncă nu există evaluări
- Project Name: Repair of Afam Vi Boiler (HRSG) Evaporator TubesDocument12 paginiProject Name: Repair of Afam Vi Boiler (HRSG) Evaporator TubesLeann WeaverÎncă nu există evaluări
- Types of Chemical Reactions: Synthesis and DecompositionDocument3 paginiTypes of Chemical Reactions: Synthesis and DecompositionAlan MartínÎncă nu există evaluări
- RSW - F - 01 " ": Building UtilitiesDocument4 paginiRSW - F - 01 " ": Building Utilities62296bucoÎncă nu există evaluări
- Philo Q2 Lesson 5Document4 paginiPhilo Q2 Lesson 5Julliana Patrice Angeles STEM 11 RUBYÎncă nu există evaluări
- Chapter 11 AssignmentDocument2 paginiChapter 11 AssignmentsainothegamerÎncă nu există evaluări
- DTR Testastretta Valve Adjustment ProcedureDocument10 paginiDTR Testastretta Valve Adjustment ProcedureTony LamprechtÎncă nu există evaluări
- Building Material Supplier in GurgaonDocument12 paginiBuilding Material Supplier in GurgaonRodidustÎncă nu există evaluări